

2. 南京航空航天大学 航空宇航学院, 江苏 南京 210016
由于失速对飞机性能和使用安全的影响,自第一架飞机问世以来失速速度和失速/尾旋特性就是研究的重点。对于通用飞机,失速速度与失速/尾旋是飞机设计完成后最先进行的试验项目。在适航取证过程中,失速速度的大小影响着飞行的各个阶段[1]。同时,失速/尾旋试验相对于常规飞行试验项目更容易发生安全事故,安全性较低,是飞行试验I类危险试飞科目[2-3]。因此研究失速/尾旋特性是十分有意义的,研究飞机尾旋的原理既可以降低意外事故发生的概率还可以使飞机在可控的范围内改出失速/尾旋[4]。
目前,研究飞机失速/尾旋特性的方法主要包括:数值仿真法、模型自由飞行试验法、尾旋风洞试验法以及外场飞行试验法。在适航取证前,飞机设计研究院所一般不会进行飞机失速特性及尾旋试验,因为尾旋试验危险性太大,且需要经验丰富的试飞员把控飞行。因此在取证试飞前应该在计算机上进行飞机失速/尾旋特性的仿真研究,为下一步正式飞行做好铺垫。尾旋风洞试验的主要目的是分析尾旋特性,再根据试验结果确定合理的改出方案,但该试验也存在一些问题,例如难以测得整个尾旋过程的动态特性。模型自由飞试验虽然可以获取失速/尾旋全过程的数据,但自由飞试验昂贵且耗时,而且难度也很大,尤其是惯性矩方面很难达到与原型机相似[5]。数值仿真法可模拟整个失速/尾旋过程,并且成本较低。但是因为失速/尾旋运动十分复杂难以预测,需要在仿真中采用先进的预测技术才能得到飞机的失速尾旋特性[6]。根据仿真计算的结果分析,如果完全满足失速/尾旋的飞行条件,下一步就是进行飞行试验前的准备工作。我国在大迎角领域的试验开始于20世纪70年代,由于对失速/尾旋重视不够,这方面的研究进展十分缓慢。最近几年,国内通用飞机仅有运12、小鹰500以及锐翔电动飞机进行过失速/尾旋试飞研究。失速/尾旋特性在很大程度上影响着通用飞机的性能和飞行安全,由于其搭载乘客,需要的安全系数更高,通常应有十分满意的失速/尾旋特性。因此按照适航条例及取证要求,通用类飞机进行失速/尾旋试飞是非常必要的[7]。
本文以某型电动飞机为例,依据适航条款ASTM(美国试验和材料标准协会)[8]的要求开展失速特性/尾旋科目的仿真模拟,失速/尾旋仿真的结果可以作为飞行试验的一种参考,同时失速/尾旋的模拟仿真计算及飞行试验是适航符合性验证的必要条件,对于获取型号证书有重大意义[9]。本文研究成果为新型号飞机研制积累经验的同时,也能缩短研制周期。
1 研究对象随着环保意识的提高, 通用类飞机开始从油动向电动过渡, 新能源电动飞机, 噪音低, 无直接的环境污染, 随着电池储能技术的发展从续航时间上将具备代替油动飞机的潜力, 因此许多国家投入大量资源进行电动飞机研制工作[10-13], 但是, 通用类电动飞机的发展也遇到了技术瓶颈, 与油动飞机相比, 电池能量密度较低, 航时航程的较短, 为了克服航程和航时的不足, 采用大展弦比的气动布局。某型双座电动飞机的总体参数如表 1所示。由于此双座电动飞机储能为固体电池, 在释放电量过程中, 质量不发生任何改变, 电动飞机基本为标准面对称, 其惯性积IXY和IYZ的数值较小, 忽略不计。实物图见图 1。

|
| 图 1 飞机实物图 |
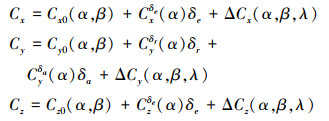
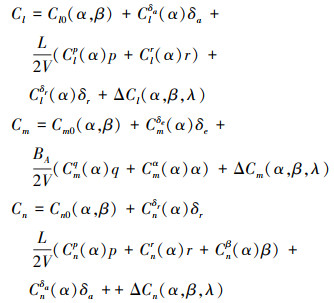
在大迎角飞行时, 气流分离和非对称流动难以避免, 这导致大迎角飞行气动性能与小迎角飞行区别显著: 大迎角时, 所有气动力和力矩都是迎角、侧滑角和滚转角变量的非线性函数; 另一方面飞机大迎角飞行时, 处于非对称流动, 此时纵向运动参数(迎角)对横航向空气动力和力矩产生影响, 同时横航向运动参数(侧滑角和滚转角速度)也对纵向空气动力和力矩产生影响[15-16]。
|
(1) |
|
(2) |
式中: V为飞机速度, 单位为m/s; α, β分别为迎角和侧滑角, 单位为°; δe, δa, δr分别为升降舵偏度、副翼偏度、方向舵偏度, 单位为(°); λ为无量纲量旋转速度; p, q, r分别为振荡角速度矢量在机体坐标系x, y, z轴上的投影, 单位为(°)/s; bA为平均气动弦长, 单位为m; L为机翼展长, 单位为m; Cx0, Cy0, Cz0, Cl0, Cm0, Cn0为p, q, r控制面均为0时(α, β)对应的气动力系数[17]。
气动模型主要由3个部分组成: 第一部分为静态系数Cx, Cy, Cz, 静态力矩系数Cl, Cm, Cn; 第二部分为滚转动导数Clp, Clr, 偏航动导数Cnp, Cnr, 俯仰动导数Cmq; 第三部分为操纵导数Clδa, Clδr等。本文通过试验获得了飞机模型在静态六分量气动力数据, 也就是第一部分以及第三部分, 而第二部分动导数是根据美国数据库软件DATACOM PLANE计算所得, 此方法得到了很多学者和工程师的认可。
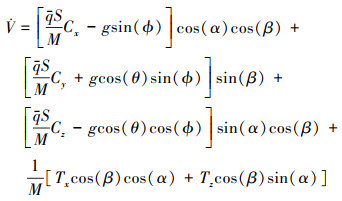
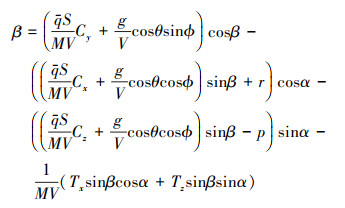
3 飞机动力学建模 3.1 动力学模型不考虑飞机弹性变形和风的影响, 依据牛顿第二定律, 飞机质心的动力学方程可以描述如下[18-19]
|
(3) |

|
(4) |
|
(5) |
|
(6) |

|
(7) |
|
(8) |
式中:q为动压,单位kg/(m·s2);S为机翼参考面积, 单位m2; Cx, Cy, Cz为沿机体轴3个方向静力系数; Ixx, Iyy, Izz为绕3个机体轴转动惯量, 单位kg·m2; Ixz为绕x, z轴的耦合惯性积, 单位kg·m2; l为滚转力矩、m俯仰力矩、n偏航力矩, 单位N·m。
3.2 转动运动学方程联立地轴系中飞机重心位置和速度的关系求解方程组[24], 获得飞机位置与状态的关系。质心运动方程为
|
(9) |
式中, θ, ϕ, φ分别为机体坐标系下的俯仰角、偏航角、滚转角, 单位为°。
3.3 飞机质心运动方程
|
(10) |
式中
|
x, y, z为飞机质心在地轴系下的位置坐标。
4 失速/尾旋仿真计算结果由于该电动飞机采用大展弦比机翼, 升阻比较大, 故不必加装襟翼提升升力, 起飞、巡航和着陆皆为一种构型。图 2和图 3是通过风洞试验得到不同升降舵下的俯仰力矩系数和升力系数随迎角变化曲线。

|
| 图 2 力矩系数Cm |

|
| 图 3 升力系数Cy |
由图 2可知, 升降舵偏转角增大的同时力矩也增大, 飞机抬头, 同一舵偏角情况下, 随迎角增大, 力矩在小迎角呈现线性下降, 但在失速迎角前后, 出现非线性减小。在升降舵偏角达到-30°, 由图 3知, 迎角14°为失速迎角, 在此迎角下俯仰力矩处于负值, 表明该迎角下, 飞机不再抬头, 从风洞数据分析, 飞机即使拉到升降舵偏最大后, 也达不到失速迎角14°。从图 3可知, 随着迎角的增大, 升力系数先增大后减小。同一舵偏角情况下, 迎角在-6°~8°之间, 升力系数随迎角增加呈线性增加, 在8°~14°之间, 升力系数非线性增加, 超过14°迎角后, 随迎角增加, 其升力系数下降, 但未出现断崖式的下降, 这就是此型号电动飞机与其他通用类飞机不同之处。
4.1 失速及失速特性仿真从配平曲线图 4上可以看出, 升降舵上偏到底时, 对应的配平迎角为12.1°, 由于受升降舵操纵效能的限制, 升降舵偏角达到最大时, 飞机并不能达到最大失速迎角, 这就出现了失速判定的特殊情况, 升降舵偏达到上偏极限, 迎角不再增加, 而速度稳定在21.7 m/s附近振荡。

|
| 图 4 纵向配平曲线 |
图 5至7为纵向和横航向模态特性, 从平飞时的特征根变化曲线可以看出, 在整个平飞过程中, 短周期模态、滚转模态、长周期模态和荷兰滚模态始终稳定, 除螺旋模态在大迎角达到二级飞行品质外, 其它都满足一级品质要求[25-27]。滚转模态的时间常数在0.09~0.33 s之间, 满足一级飞行品质要求。螺旋模态不稳定主要是由于该型飞机采用上单翼、大展弦比构型, 横向静稳定性相对航向静稳定性过大造成的, 其倍幅时间在3.5~69.3 s之间。在迎角12.1°、速度21.7 m/s时倍幅时间最小, 为3.5 s左右, 随着速度增加, 倍幅时间增加。飞机出现这种特殊的失速特性的原因是飞机采用大展弦比上单翼气动布局, 在机翼的每一侧, 机翼由两段组成且扭转角相反, 靠近翼根的部分为矩形, 翼尖部分为梯形。

|
| 图 5 纵向模态特征根 |

|
| 图 6 纵向模态 |

|
| 图 7 横航向模态 |
尾旋是大迎角飞行时特殊的非线性动力学特性, 在历来的尾旋特性现象中, 很少出现相同的尾旋特征, 说明尾旋特征的随机性。尾旋的特征现象大致从4个方面分析: 出现尾旋时迎角大于静态失速迎角; 具有连续的滚转和偏航运动; 尾旋半径极小, 甚至仅有几米; 另外出现尾旋后, 其速度方向接近于垂直下落。尾旋的种类也很多, 根据适航要求与飞行试验相对应, 本文仅对左尾旋和右尾旋做了分析。左、右尾旋仿真计算输入参数与飞行试验输入参数保持一致, 主要目的是为了更好地验证数学模型的准确性与可靠性。
4.2.1 左尾旋整个左尾旋仿真模拟过程中, 副翼保持中立, 为了保证飞机失速的真实性, 升降舵偏以线性方式增加舵偏角, 直到升降舵偏到限位点位置, 此时刻方向舵左偏满偏, 保持5s, 模拟仿真的计算结果见图 8至12。方向舵满偏位置后, 侧滑角达到20°, 迎角不升反降, 飞机最大俯仰角-48.6°, 左滚角度-65.7°, 在旋转180°后, 方向舵回复到中立位置, 下降高度110m。从理论模拟仿真分析可知, 迎角小于失速迎角, 半径超过50m, 速度方向也未出现明显的垂直下落, 种种迹象表明, 尾旋特征不明显。

|
| 图 8 左尾旋舵偏角 |

|
| 图 9 左尾旋迎角α和侧滑角β的变化曲线 |

|
| 图 10 左尾旋速度增量 |

|
| 图 11 左尾旋俯仰角θ和滚转角φ的变化曲线 |

|
| 图 12 左尾旋三方向位置 |
图 13至17为右尾旋特性模拟仿真结果, 通过理论模拟仿真, 与左尾旋计算结果相似, 说明飞机气动特性具有左右对称性。

|
| 图 13 右尾旋舵偏角 |

|
| 图 14 右尾旋迎角α和侧滑角β的变化曲线 |

|
| 图 15 右尾旋速度增量 |

|
| 图 16 右尾旋俯仰角θ和滚转角φ的变化曲线 |

|
| 图 17 右尾旋三方向位置 |
该型电动飞机失速特性飞行试验在海拔高度1 000 m进行, 进入失速是根据ASTM适航条例的要求, 采用机翼水平减速法进入失速, 失速后施加持续的长时间拉杆, 检查和发现飞机失速特性[28]。图 18是失速特性飞行试验许多架次中之一, 参数是通过机载设备实时发送到地面接收系统, 包括失速速度、滚转角、俯仰角以及升降舵偏角等关键参数。升降舵偏达到最大值后持续抱杆, 速度不增加或减小, 基本维持在平均速度21.7 m/s上下振荡, 此速度则为失速速度。在抱杆期间, 俯仰角呈正弦波抬头低头交替出现, 俯仰角的大小平均在12°上下震荡, 在平飞过程中, 不考虑风的影响, 迎角与俯仰角相等。在没有横侧操纵只有纵向操纵的情况下做小振幅滚转和偏航振荡, 这是由于失速迎角附近横纵耦合影响。由图 18可知, 在副翼和方向舵中立时, 飞机左右振荡, 其振荡幅度平均3°, 在不施加干扰情况下, 滚转阻尼较大, 说明飞机不易进入侧偏。松杆后, 飞机速度增加, 纵向稳定性良好。

|
| 图 18 失速特性飞行试验结果 |
尾旋飞行试验是最危险的科目之一, 但飞机作为一种商品交付客户, 必须得保证飞机在任何状态下具有安全性, 为了取得适航证, 局方要求必须按照ASTM适航条款进行尾旋飞行试验, 以验证飞机的尾旋特性, 尾旋试验共完成了左尾旋和右尾旋。
5.2.1 左尾旋由图 19、图 20可知, 飞机进入失速前, 副翼和方向舵处于中立位置, 横向有较小的滚转振荡运动, 因此飞机此时运动为非指令性的, 飞行参数记录仪记录的空速速度为21.4 m/s, 与图 4和图 10理论模拟仿真速度相吻合。抱杆持续, 瞬时蹬方向舵达到最大满偏, 此时飞机产生侧滑, 出现严重的滚转, 滚转角达到-74°, 侧滑角和滚转角同时达到峰值, 但俯仰角峰值延迟4 s。与图 9和图 11数值模拟仿真滚转角、俯仰角和侧滑角规律相似, 但峰值响应时间未达同步。试验结果速度增加较快, 滚转角较大, 与尾旋的特性不太符合。

|
| 图 19 左尾旋时速度V与升降舵偏角δe |

|
| 图 20 左尾旋时滚转角φ、俯仰角θ和侧滑角β |
由图 21、图 22可知, 与强制进入左尾旋动作一致, 飞机进入失速前, 副翼和方向舵处于中立位置, 横向滚转振荡运动相比于左尾旋前明显增大, 飞机此时运动为非指令性的, 飞行参数记录仪记录的失速速度为19.8 m/s, 由升降舵偏角的变化率分析, 拉杆的速度较快, 造成速度减速率过大, 产生的失速速度较小。与图 4和图 15理论模拟仿真速度相吻合。抱杆持续, 瞬时蹬方向舵达到最大满偏, 此时飞机产生侧滑, 出现严重的滚转, 滚转角达到-97.4°, 侧滑角和滚转角同时达到峰值, 但俯仰角峰值延迟2 s。与图 14和图 16数值模拟仿真滚转角、俯仰角和侧滑角规律相似, 但峰值响应时间未达同步。试验的结果速度增加较快, 经过4 s时间速度从18.5 m/s增加到50.9 m/s, 滚转角较大, 与尾旋特征不太相符。

|
| 图 21 右尾旋时速度V与升降舵偏角δe |

|
| 图 22 右尾旋时滚转角φ、俯仰角θ和侧滑角β |
本文对锐翔通用电动飞机大迎角失速特性和尾旋特性进行了仿真研究, 并与飞行试验结果进行了比较, 结论如下:
1) 不同配平迎角下的模态分析结果表明, 该通用电动飞机的短周期模态、滚转模态和荷兰滚模态具有良好的飞行品质。这说明采用上单翼大展弦比、扭转角相反的两段机翼气动布局是成功的。但由于横向静稳定性相对航向静稳定性较大, 存在螺旋模态缓慢发散现象。
2) 平飞失速特性的分析结果与试飞结果一致, 说明本文所建立的非线性飞行动力学模型在纵向静态气动特性是比较准确的, 与实际情况比较吻合。
3) 仿真和飞行试验结果均表明, 在尾旋操纵输入作用下, 飞机主要表现为盘旋下降, 没有明显的尾旋特征, 失速后机头未下沉, 说明该型飞机不易进入尾旋。根据飞参数据随时间的变化历程可以看出, 仿真结果与飞行试验结果具有相同的变化趋势, 同时也说明了本文建立的飞行动力学模型能够反映飞机的主要运动特征。仿真与飞行试验的结果有所不同, 主要是飞参数据在量值上存在一定的差异, 说明本文所建飞行动力学模型的精准性还存在欠缺, 比如未考虑弹性变形和非定常气动力影响等。在后续研究中, 需要进一步开展相关风洞试验补充新的气动数据, 或者采用气动参数辨识方法根据飞行试验数据提取相关气动参数, 从而对飞行动力学模型进行修正和完善, 以提高地面仿真模型的逼真度, 从而为实际飞行前开展飞行员训练提供基础, 也为新型号电动飞机的设计积累经验。
| [1] |
梁佳骅, 白俊强, 李国俊. 基于Peters-ONERA模型的失速颤振特性研究[J]. 西北工业大学学报, 2018, 36(5): 875-883.
LIIANG Jiahua, BAI Junqiang, LI Guojun. Investigation of stall flutter based on peters-ONERA aerodynamic model[J]. Journal of Northwestern Polytechnical University, 2018, 36(5): 875-883. (in Chinese) DOI:10.3969/j.issn.1000-2758.2018.05.009 |
| [2] |
赵晶慧, 颜巍, 陈迎春. 大型民机失速/尾旋特性与反尾旋伞研究[J]. 飞行力学, 2019, 37(4): 12-15.
ZHAO Jinghui, YAN Wei, CHEN Yingchun. Research on stall/spin and anti-spin parachute for large civil aircraft[J]. Flight Dynamic, 2019, 37(4): 12-15. (in Chinese) |
| [3] |
赵鹏, 岳红梅. 失速教学[J]. 中国民航飞行学院学报, 2001, 12(1): 13-14.
ZHAO Peng, YUE Hongmei. Stall teaching[J]. Journal of China Civil Aviation Flying College, 2001, 12(1): 13-14. (in Chinese) DOI:10.3969/j.issn.1009-4288.2001.01.004 |
| [4] |
奇万涛, 李伟, 吕新波. 飞机失速/尾旋特性飞行仿真方法研究[J]. 航空科学技术, 2016, 27(6): 16-19.
QI Wantao, LI Wei, LYU Xinbo. Research on flight simulation techniques for the stall and spin characteristics of the airplane[J]. Aeronautical Science & Technology, 2016, 27(6): 16-19. (in Chinese) |
| [5] |
张爱婷, 王俊扬. AC500飞机尾旋特性飞行试验研究[J]. 南京航空航天大学学报, 2007, 39(1): 113-116.
ZHANG Aiting, WANG Junyang. Research on AC500 aircraftspin flight test[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2007, 39(1): 113-116. (in Chinese) DOI:10.3969/j.issn.1005-2615.2007.01.024 |
| [6] |
李永富, 陈洪. 研究尾旋的风洞试验技术[M]. 北京: 国防工业出版社, 2002: 9-10.
LI Yongfu, CHEN Hong. Wind tunnel technques for studying spin[M]. Beijing: National Defence Industrial Press, 2002: 9-10. (in Chinese) |
| [7] |
李雪琴, 宫西卿, 贾晓鹏, 等. JL8飞机失速尾旋飞行试验研究[J]. 飞行力学, 2001, 19(2): 57-61.
LI Xueqin, GONG Xiqin, JIA Xiaopeng. Research on JL8 aircraft stall and spin flight test[J]. Flight Dynamic, 2001, 19(2): 57-61. (in Chinese) DOI:10.3969/j.issn.1002-0853.2001.02.015 |
| [8] | American Society for Testing and Materials. Standard Specification for Design and Performance of a Light Sport Airplane[S]. F2245-11-2011 |
| [9] |
李亚东, 张子军, 杨凤田, 等. 某型电动飞机起飞爬升性能分析及飞行试验研究[J]. 科学技术与工程, 2019, 35: 364-369.
LI Yadong, ZHANG Zijun, YANG Fengtian, et al. Analysis of take-off and climb performance of a certain type of electric aircraft and flighting test[J]. Science Technology and Engineering, 2019, 35: 364-369. (in Chinese) |
| [10] | SALANM Abdus, EUNUS Zahidul Islam. Recent green aviation technologies an overview[J]. Journal of Modern Science and Technology, 2013, 1(1): 61-75. |
| [11] | JEREMY F. Electric motor & power sourceselection for small aircraft propulsion[D]. West Lafayette: Purdue University, 2011 |
| [12] |
黄俊, 杨凤田. 新能源电动飞机发展与挑战[J]. 航空学报, 2016, 37(1): 57-68.
HUANG Jun, YANG Fengtian. Development and challenges of electric aircraft with new energies[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 57-68. (in Chinese) |
| [13] |
张钧尧, 佟刚, 李亚东, 等. 某型电动飞机起飞加速特性分析与仿真模型修正[J]. 航空工程进展, 2021, 12(2): 98-105.
ZHANG Junyao, TONG Gang, LI Yadong. Analysis of take-off acceleration characteristics and simulation model modification of a certain electric aircraft[J]. Advances in Aeronautical Science and Engineering, 2021, 12(2): 98-105. (in Chinese) |
| [14] |
刘昶. 大迎角非线性飞行动力学(Ⅰ)[J]. 飞行力学, 1989(2): 97-99.
LIU Chang. Nonlinear flight dynamics at high angle of attack(Ⅰ)[J]. Flight Dynamic, 1989(2): 97-99. (in Chinese) |
| [15] |
饶秋磊, 韩意新. 大迎角气动力建模与失速/尾旋模态仿真[J]. 应用力学学报, 2018, 35(3): 472-477.
RAO Qiulei, HAN Yixin. High angle of attack aerodynamic modeling and simulation and analysis of stall/spin mode[J]. Chinese Journal of Applied Mechanics, 2018, 35(3): 472-477. (in Chinese) |
| [16] |
陈永亮. 飞机大迎角非线性动力学特性分析与控制[D]. 南京: 南京航空航天大学, 2007: 69-76 CHEN Yongliang. Nonlinear dynamic characteristics analysis and control of aircraft at high-angle-of-attack[D]. Nanjing: Nanjing University of Aeronautics & Astronautics, 2007: 69-76(in Chinese) |
| [17] |
李晓刚. 歼击机大迎角尾旋特性分析和改出研究[D]. 南京: 南京航空航天大学, 2016: 8-9 LI Xiaogang. Analysis and recovery of aircraft's spin characteristics at high angle of attack[D]. Nanjing: Nanjing University of Aeronautics & Astronautics, 2016: 8-9(in Chinese) |
| [18] |
李满, 宋笔锋, 焦景山, 等. 基于柔性梁模型的大展弦比无人机动力学建模与分析[J]. 西北工业大学学报, 2013, 31(6): 858-864.
LI Man, SONG Bifeng, JIAO Jingshan, et al. Flight dynamics modeling and analysis of high aspect ratio UAV based on flexible beam model[J]. Journal of Northwestern Polytechnical University, 2013, 31(6): 858-864. (in Chinese) DOI:10.3969/j.issn.1000-2758.2013.06.006 |
| [19] | ABRAMOV N B, GOMAN M G, KHRABROV A N, et al. Simple wings unsteady aerodynamicsat high angles of attack: experimental and modeling results[R]. AIAA-1999-4013 |
| [20] | ABRAMOV N B, GOMAN M G, GREENWELL D I, et al. Two-step linear regression method for identification of high incidence unsteady aerodynamic model[R]. AIAA-2001-4080 |
| [21] |
汪清, 蔡金狮. 飞机大攻角非定常气动力建模与辨识[J]. 航空学报, 1996, 17(4): 391-398.
WANG Qing, CAI Jinshi. Unsteady aerodynamic modeling and identification of airplane at high angles of attack[J]. Acta Aeronautica et Astronautica Sinica, 1996, 17(4): 391-398. (in Chinese) DOI:10.3321/j.issn:1000-6893.1996.04.003 |
| [22] |
赵涛. 大迎角失速/尾旋及反尾旋伞仿真计算研究[D]. 西安: 西北工业大学, 2000: 10-12 ZHAO Tao. Research and simulation of high AOA stall/spin and anti-spin parachute[D]. Xi'an: Northwestern Polytechnical University, 2000: 10-12(in Chinese) |
| [23] |
史志伟, 黄达, 吴根兴, 等. 耦合运动非定常气动模型对飞机飞行特性方针的影响[J]. 航空学报, 2008, 29(6): 1424-1427.
SHI Zhiwei, HUANG Da, WU Genxing, et al. Effects of coupled motion unsteady aerodynamic model on flight characteristics simulation of aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(6): 1424-1427. (in Chinese) DOI:10.3321/j.issn:1000-6893.2008.06.003 |
| [24] |
贾荣珍, 王行仁. 飞行仿真系统的建模与研究[J]. 飞行力学, 1996, 14(1): 80-84.
JIA Rongzhen, WANG Xingren. Modeling and verification of flight simulation system[J]. Flight Dynamics Journal, 1996, 14(1): 80-84. (in Chinese) |
| [25] | ABRAMOV N, GOMAN M, KHRAHROV A. Aircraft dynamics at high incidence flight with account of unsteady aerodynamic effects[R]. AIAA-2004-5274 |
| [26] |
龚正. 先进飞行器非定常气动力建模, 控制律设计及验证方法研究[D]. 南京: 南京航空航天大学, 2011: 47-55 GONG Zheng. Research on unsteady aerodynamic modeling, control law design and clearance for advanced aerospace vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011: 47-55(in Chinese) |
| [27] | ABRAMOV N, GOMAN M, DEMENKOV M, et al. Lateral-directional aircraft dynamics at high incidence flight with account of unsteady aerodynamic effects[R]. AIAA-2005-6331 |
| [28] |
崔益华, 王启, 李吉宽. 某型教练飞机尾旋特性试飞研究[J]. 航空工程进展, 2012, 3(1): 16-18.
CUI Yihua, WANG Qi, LI Jikuan. Flight test research of a trainer's spin characteristics[J]. Advances in Aeronautical Science and Engineering, 2012, 3(1): 16-18. (in Chinese) |
2. College of Aerospace Engineering, Nanjing University of Aeronations and Astronautics, Nanjing 210016, China
