



随着经济的迅速发展和能源需求的大幅增长, 作为能源枢纽的发电系统不仅与可再生能源的生产密切相关, 还将对实现能源转型起到关键作用[1]。与此同时, 寻求新型发电装置也成为解决能源短缺问题的主要研究方向。机械整流永磁发电机(mechanical rectification permanent magnet generator, MR-PMG)是可以收集双向运动机械能的新型发电机, 它不仅具有永磁发电机效率高、稳定性高和易于控制等优点, 还因巧妙的结构设计使发电机内部呈镂空状态, 提高了散热性能。该发电机在收集双向运动机械能领域有着广阔的应用前景, 如可应用于波浪能收集和往复机构残余能量收集装置等场合。在整流过程中, MR-PMG工作在变转速或变载荷等工况, 因此研究该发电机复合转子系统在双向输入时的动态特性, 对保证各行星轮分路载荷的均匀分配以及该新型发电机的振动噪声控制和可靠运行具有重要意义。
目前国内外已有众多学者对齿轮传动系统动态特性进行了大量研究, 其中应用最广泛的模型为齿轮啮合副动力学模型, 通过将齿轮、传动轴和支撑轴视为一体, 以支撑和扭转刚度来代替各轴段之间的耦合作用[2]。Ren等[3]采用集中质量参数法建立了广义人字行星齿轮系统弯曲-扭转-轴向耦合动力学模型, 并分析了不同偏心制造误差对系统动态特性的影响。Kahraman等[4]采用集中质量参数法建立了行星齿轮传动系统的动力学模型, 通过实验验证了不同偏心制造误差对系统动态特性的影响。Dong等[5]采用集中质量参数法建立了三行星齿轮传动的扭转-平动耦合非线性动力学模型, 并分析了支撑刚度对系统振动特性的影响。国内学者孙智民等[6]建立了星型齿轮传动系统动力学模型, 并分析了不同负载对其系统动态特性的影响。肖正明等[7]运用集中质量参数法, 建立了三级斜齿行星传动啮合型弯-扭-轴动力学模型, 并分析了激励参数和裂纹故障对系统动力学特性的影响。
本文则以机械整流永磁发电机复合转子系统为研究对象, 基于其整流原理分析该复合转子系统的啮合驱动关系, 由集中质量参数法建立该复合转子系统双向输入的动力学模型, 通过数值积分法得到转子系统在双向输入时各构件的动态振动位移响应、啮合力响应和均载系数, 并分析了双向不同输入工况对该转子系统动态特性的影响规律。
1 结构原理MR-PMG主要由外定子和复合转子系统组成, 其结构如图 1所示。外定子由硅钢片叠压而成, 其内表面均匀布有梨形电枢绕组槽; 复合转子系统主要由齿圈转子、行星轮、中心轮和转架组成, 它集成了单向轴承和行星定轴轮系, 是一种新型发电机结构。齿圈转子外表面均匀布置N-S极相间的永磁体, 其内齿圈与中心轮和行星轮组成行星传动系统以实现机械整流功能。与齿圈转子固连的转架轴和中心轮轴上装有锁合方向相反的单向轴承, 两者随其输入轴转向的不同实现不同的锁止和脱开状态, 从而保证齿圈转子单向旋转运动的输出。

|
| 图 1 MR-PMG结构 |
MR-PMG的整流原理如图 2所示。图 2中实线为顺时针输入时的能量传递过程: 输入轴按顺时针方向1输入时, 转架轴处单向轴承内外圈锁止, 从而驱动齿圈转子顺时针方向2转动, 中心轮轴处单向轴承内外圈脱开空转, 内圈随输入轴顺时针转动, 外圈随齿圈转子啮合驱动的中心轮逆时针方向4转动, 此时齿圈转子与输入轴同向顺时针旋转, 能量由外向里传递。图 2中虚线为逆时针输入时的能量传递过程: 输入轴按逆时针方向1′输入时, 中心轮轴处单向轴承内外圈锁止, 从而带动中心轮逆时针方向2′转动, 通过与行星轮啮合驱动齿圈转子顺时针方向4′转动, 转架轴处单向轴承内外圈脱开各自空转, 内圈随输入轴逆时针转动, 外圈随转架与齿圈转子顺时针转动, 此时齿圈转子转向与输入轴相反, 即依旧为顺时针转动, 能量由里向外传递。由此完成了MR-PMG双向输入单向输出的整流过程。

|
| 图 2 机械整流原理 |
假设各齿轮均为直齿圆柱齿轮,各行星轮沿圆周均匀分布且物理参数一致,忽略齿轮侧隙和啮合时的摩擦力。所建立复合转子系统动力学模型如图 3所示。在图 3中, Kspi, Cspi, espi分别为中心轮与行星轮外啮合副的啮合刚度、阻尼和传动误差; Krpi, Crpi, erpi分别为各行星轮与齿圈转子内啮合副的啮合刚度、阻尼和传动误差; ksx, ksy和kst为中心轮的径向刚度和周向刚度; kpx, kpy为行星轮的径向刚度; krx, kry和krt为齿圈转子的径向刚度和周向刚度。

|
| 图 3 复合转子系统动力学模型 |
中心轮、N个行星轮和齿圈转子均有水平x、水平y和扭转ε方向的自由度, 在系统双向顺逆输入时均有(6+3N)个自由度, 其广义坐标分别定义为X1和X2, 有

|
(1) |
式中: εs1, εpi1, εr1和εs2, εpi2, εr2分别为中心轮、各行星轮和齿圈转子在顺逆输入时沿啮合线方向的扭转角位移; xs1, xpi1, xr1和xs2, xpi2, xr2分别为中心轮、各行星轮和齿圈转子在顺逆输入时质心沿径向x方向的弹性线位移; ys1, ypi1, yr1和ys2, ypi2, yr2分别为中心轮、各行星轮和齿圈转子顺逆输入时坐标系下质心沿径向y方向的弹性线位移。
为了计算复合转子系统内外啮合副在各自啮合线方向上产生的弹性变形, 由图 3的动力学模型, 得到复合转子系统内外啮合副各构件相对位置关系如图 4所示。图中, Nsp和Nrp分别为内外啮合副的啮合方向线; ψsi=ϕi-αs, ψri=ϕi+αr, ϕi为各行星轮相对于横轴的位置角, 且ϕi=2π(i-1)/N; αs为中心轮与行星轮外啮合副的啮合角, αr为行星轮与齿圈转子内啮合副的啮合角; rbs, rbp和rbr分别为中心轮、各行星轮和齿圈转子的基圆半径。

|
| 图 4 复合转子系统各构件相对位置 |
为简化计算, 规定顺时针输入方向为各构件扭转角位移的正方向, 同时在定义各啮合副在各自啮合线上的相对位移时, 规定齿面受压力为正, 受拉力为负。由图 4中该转子系统内外啮合副相对位置关系, 可得复合转子系统双向顺逆输入时, 太阳轮与各行星轮沿Nsp啮合线正方向的弹性相对线位移, 以及齿圈转子与各行星轮沿Nrp啮合线正方向的相对位移, 分别表示为ζspi1, ζspi2和ζrpi1, ζrpi2, 有

|
(2) |
式中: espi1, espi2和erpi1, erpi2分别为复合转子系统内外啮合副在双向输入时的啮合传递误差激励。
3 系统动力学平衡方程及激励 3.1 系统各构件受力分析为了分析MR-PMG复合转子系统的动力学特性, 对其复合转子系统在双向输入时的各构件进行受力分析如图 5所示。

|
| 图 5 双向输入时复合转子系统各构件受力分析 |
图中: Pspi1, Prpi1和Dspi1, Drpi1分别为该转子系统顺时针输入时单个行星轮分路外啮合和内啮合的弹性力和阻尼力; Pspi2, Prpi2和Dspi2, Drpi2为该转子系统逆时针输入时单个行星轮分路的外啮合和内啮合弹性力和啮合阻尼力; csx, csy, cst和crx, cry, crt分别为中心轮和齿圈转子的径向支撑阻尼和扭转阻尼; cpx, cpy为行星轮的径向支撑阻尼。
在MR-PMG复合转子系统双向输入时, 由其转子系统的内外啮合刚度和啮合阻尼, 可得其内外各啮合副沿各自啮合线方向的啮合弹性力分别为
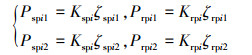
|
(3) |
沿各自啮合线方向的阻尼力分别为
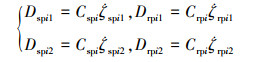
|
(4) |
复合转子系统在双向输入时各构件的受力分析如图 5所示, 将作用于复合转子系统各构件上的啮合弹性力、啮合阻尼力和外部输入激励力组成平衡力系, 可得到该转子系统在双向顺逆输入时各构件在各自由度上的动力学平衡方程。由于双向动力学方程的相似性,文中仅列出顺时针时的动力学方程。
中心的动力平衡方程为
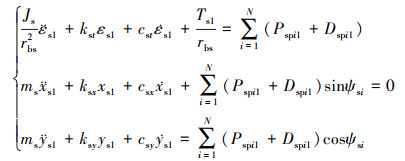
|
(5) |
各行星轮的动力平衡方程分别为

|
(6) |
齿圈转子的动力平衡方程分别为
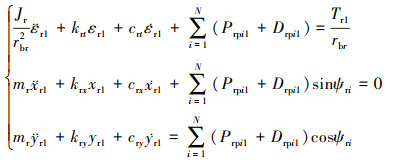
|
(7) |
(5)~(7)式中: Js, Jp, Jr和ms, mp, mr分别为中心轮、行星轮和齿圈转子的转动惯量和质量。
3.3 系统综合激励系统的激励主要有外部动态激励和内部激励。复合转子系统的外部激励为双向输入的动态转矩, 内部激励为齿轮啮合过程中所产生时变啮合刚度激励、啮合传递误差激励和啮合阻尼, 时变啮合刚度激励可通过对啮合刚度进行傅里叶变换得到

|
(8) |
式中: τ1=t/Tm1, τ2=t/Tm2, Tm1和Tm2分别为复合转子系统双向输入时的啮合周期, δspi和δrpi分别为内外啮合副的重合度, Km_spi和Km_rpi分别为啮合副的平均啮合刚度, 其中Ak_spi, Bk_spi和Ak_rpi, Bk_rpi为

|
(9) |
将齿频与偏心误差等效到复合转子系统对应内外啮合副的啮合线方向上, 可得到该转子系统在双向输入时的内外啮合误差激励为
|
(10) |
式中: Espi和Erpi分别为MR-PMG复合转子系统内外啮合副的齿频误差, 对应的初相位分别为θspi和θrpi; Es, Epi和Er分别为中心轮、行星轮和齿圈转子的偏心误差, 初相位分别为θs, θpi, θr; ω1, ω2分别为复合转子系统双向顺逆输入时的啮合频率; ωs1, ωpi1, ωr1和ωs2, ωpi2, ωr2分别为中心轮、各行星轮和齿圈转子在顺逆输入时的转动角速度。根据经验公式可以得到啮合阻尼, 求得MR-PMG复合转子系统内外啮合阻尼分别为
|
(11) |
式中: Ms, Mp和Mr分别为中心轮、行星轮和齿圈转子的等效质量, 且Ms=Js/rbs2, Mp=Jp/rbp2, Mr=Jr/rbr2; ξ为啮合阻尼比。
4 复合转子系统动态特性分析本文复合转子系统的动态特性是指该系统在双向输入载荷作用下随时间变化的动态响应, 主要包括动态位移响应、啮合力响应和均载系数。采用Runge-Kutta法[8]对MR-PMG复合转子系统在双向输入时各构件的动态平衡方程进行求解, 可得各构件的动态振动位移响应、内外啮合力响应以及均载系数响应。MR-PMG复合转子的参数为:齿数zs=40, zp=20, zr=80;压力角为20°; 模数为2 mm; 齿宽为20 mm; 偏心与齿轮误差为10 μm。
4.1 动态位移响应由于顺逆时针输入工况的相似性, 针对顺时针输入工况下复合转子系统的动态位移响应进行了研究。在MR-PMG进入稳态运行后, 其复合转子系统在顺时针输入时, 中心轮、行星轮和齿圈转子在x, y方向上的动态位移响应如图 6所示。

|
| 图 6 各构件在x与y方向上的动态位移响应 |
可以看出, 复合转子系统各构件在各自由度方向上的振动位移响应均在各自的平衡位置附近周期性变化。中心轮和齿圈转子在径向上的振动位移波动幅值均在10 μm左右, 由于两者旋转中心相同, 其受力情况具有相似性; 而行星轮在x方向和y方向的振动位移响应差异明显, 其中x方向的位移响应波动幅值远小于y方向, 这是由于行星轮受到内外啮合力在切向方向上一致, 而在径向方向上相反, 叠加后则在切向累加而在径向抵消产生的结果; 对动态平衡方程进行求解, 可得中心轮、行星轮和齿圈转子的扭转位移波动幅值在双向输入时均在25 μm左右。总体来说, 复合转子系统各构件的扭转振动位移响应幅值相差不大。
4.2 动态啮合力响应及均载系数MR-PMG复合转子系统的动态啮合力主要由啮合弹性力和啮合阻尼力组成, 其内外啮合副在系统双向输入时的动态内外啮合力为

|
(12) |
为了衡量啮合力的波动程度, 引入内外啮合力的标准偏差ΔFspi1, ΔFrpi1和ΔFspi2, ΔFrpi2以及均载系数bspi1, bspi2, brpi1和brpi2。
图 7为MR-PMG进入稳态运行后, 其复合转子系统各行星轮分路内外啮合力响应。可以看出, 逆时针输入时各行星轮分路内外啮合力在极值和均值上是顺时针输入时的2倍左右, 这是由于该转子系统在双向输入时所传递的转矩比与齿圈转子的转速比呈负相关。此外, 各行星轮分路啮合力在双向输入时的标准偏差均在200 N上下波动, 表明双向输入工况下该系统内外啮合力波动幅度相近, 与中心轮、行星轮和齿圈转子三者在双向输入工况下的扭转振动位移波动幅值相近的结果基本一致。

|
| 图 7 双向输入时各路内外啮合力响应 |
由于双向输入工况下的内外啮合力变化很小, 在复合转子系统均载系数的研究中着重观察外啮合情况。在相同工况下, 复合转子系统进入稳态运行后的外啮合均载系数如图 8所示。

|
| 图 8 双向输入时外啮合均载系数 |
可以看出双向输入工况下各路外啮合均载系数变化规律基本相似, 均在1附近呈现周期性变化; 求解内外啮合均载系数的最大值, 得到Bsp1=1.305 1, Brp1=1.305 3, Bsp2=1.132 5, Brp2=1.132 4, 可知逆时针输入工况下该转子系统均载系数均明显小于顺时针输入工况, 均载性能较好。
4.3 运行工况参数对动态特性影响复合转子系统各个行星轮分路的内外啮合力变化规律相同, 现以其中一个行星轮为例研究运行工况参数对动态特性的影响, 主要包括输入转矩和转速。图 9给出了该转子系统稳态下外啮合力均值、啮合力标准偏差分别随输入转速和转矩的变化规律。

|
| 图 9 转速与转矩对动态特性的影响 |
由图 9a)~9b)可以看出, 在双向恒转矩输入工况下, 随转速增大, 逆时针输入工况下复合转子系统外啮合力均值始终大于顺时针输入工况, 且啮合力基本不受转速变化影响; 外啮合力标准偏差随转速增大均呈现减小趋势, 且顺时针输入时减小趋势较为明显。由图 9c)~9d)可以看出, 该复合转子系统在双向输入时, 其外啮合力均值均随转矩的增大而线性增大, 且逆时针输入时啮合力均值的增大斜率较顺时针输入时大; 外啮合力标准偏差均随转矩增大稍有减小, 变化幅度在5%以内。
5 结论1) 机械整流永磁发电机复合转子系统中心轮、行星轮和齿圈转子的扭转振动以及动态啮合力波动程度在双向输入工况下是相近的, 表明复合转子系统在双向输入时受输入工况影响不明显。
2) 双向输入转速变化对该发电机复合转子系统的动态特性影响较小; 且随着双向输入转速和转矩的增大, 逆时针输入工况下该系统内外啮合均载系数小于顺时针输入工况, 均载性能较好, 各行星轮分路载荷分配较为均衡, 表明该发电机在双向输入工况下的工作稳定性较好。
3) 双向输入时内外啮合均载系数均随输入转矩增大而明显减小, 在转矩达到500 N·m时均载系数均趋于平缓; 增大输入转矩不仅能提高该发电机复合转子系统的啮合力, 还能明显改善其均载性能, 使该发电机在双向输入时获得较好的动态性能。
| [1] |
李晖, 刘栋, 姚丹阳. 面向碳达峰碳中和目标的我国电力系统发展研判[J]. 中国电机工程学报, 2021, 41(18): 6245-6259.
LI Hui, LIU Dong, YAO Danyang. Analysis and reflection on the development of power system towards the goal of carbon emission peak and carbon neutrality[J]. Proceedings of the CSEE, 2021, 41(18): 6245-6259. (in Chinese) |
| [2] | PARKER R G. Non-linear dynamic response of a spur gear pair: modeling and experimental comparisons[J]. Journal of Sound and Vibration, 2000, 237(3): 435-455. DOI:10.1006/jsvi.2000.3067 |
| [3] | REN F, LUO G F, SHI G Q. Influence of manufacturing errors on dynamic floating characteristics for herringbone planetary gears[J]. Nonlinear Dynamics, 2018, 93(2): 361-372. DOI:10.1007/s11071-018-4197-y |
| [4] | KAHRAMAN A. Static load sharing characteristics of transmission planetary gear sets: model and experiment[J]. SAE Transactions, 1999, 108(2): 1954-1963. |
| [5] | DONG H, ZHANG K, WANG D, et al. Dynamic modeling of planetary gear train for vibration characteristic analysis[J]. Mechanisms, Transmissions and Applications, 2015, 31: 187-195. |
| [6] |
孙智民, 沈允文, 王三民, 等. 星型齿轮传动系统的非线性动力学分析[J]. 西北工业大学学报, 2002, 20(2): 222-226.
SUN Zhimin, SHEN Yunwen, WANG Sanmin, et al. On nonlinear dynamic behavior of star gear system due to clearances[J]. Journal of Northwestern Polytechnical University, 2002, 20(2): 222-226. (in Chinese) |
| [7] |
肖正明, 郇立荣, 曹金鑫. 裂纹故障对行星齿轮传动系统动力学特性的影响[J]. 振动与冲击, 2020, 39(2): 188-194.
XIAO Zhengming, HUAN Lirong, CAO Jinxin. Influence of crack fault on the dynamical characteristics of a planetary gear transmission system[J]. Journal of Vibration and Shock, 2020, 39(2): 188-194. (in Chinese) |
| [8] |
刘明, 赵永强, 徐冬梅, 等. 空间机械臂用多级2K-H行星传动系统模块化动力学研究[J]. 西北工业大学学报, 2014, 32(4): 606-611.
LIU Ming, ZHAO Yongqiang, XU Dongmei, et al. Study on modular dynamics of multistage 2K-H planetary transmission system for space manipulator[J]. Journal of Northwestern Polytechnical University, 2014, 32(4): 606-611. (in Chinese) |
