



2. 空装驻沈阳地区第一军事代表室, 辽宁 沈阳 110850
协同任务分配是编队协同作战的一项核心任务, 其目的是在我方指挥控制系统协助下, 根据目标属性、目标价值、威胁程度、毁伤要求以及编队资源配置情况, 通过合理选择最优编队任务方案, 实现作战资源的优化配置, 提高作战效能, 减小任务代价, 充分发挥作战资源综合优势。
在体系划分上, 作战任务分配问题可分为任务预分配和动态分配。目前相关研究中主要采用智能算法(蚁群算法、粒子群算法、人工免疫算法、遗传算法和模拟退火算法等)和分布式合同网协议(contract net protocol, CNP)分别求解任务预分配和动态分配模型。在任务预分配问题中, 文献[1-2]采用蚁群算法和模拟退火混合算法, 每次迭代引入退火准则, 提高了算法逃离局部最优的能力。文献[3]通过改进的双向蚁群和离散蜜獾算法完成无人机任务分配。文献[4]使用多目标灰狼算法与多目标粒子群算法相结合, 完成多目标任务分配。为了向驾驶员提供更加多样化的选择方案, 充分发挥人的经验优势, 多目标优化框架[5-7]逐渐被应用到任务分配问题中。文献[8-9]采用改进的非支配遗传算法生成多个非支配最优分配方案以供驾驶员选择。在动态分配问题中, 文献[10-11]基于CNP求解动态任务重分配问题, 通过编队负载系数来平衡编队内战机负载。文献[12]在传统CNP中引入交换合同解决死锁问题。文献[13]通过加权平均将多目标优化问题转换为单目标优化问题后, 采用CNP解决了多无人机动态任务调度问题。
综合目前的研究现状, 可以发现, 单目标优化算法和多目标优化算法已经得到了任务分配领域内学者们的广泛研究, 但是所做研究集中在对于算法性能的改进和作战情景的探索上。在作战行动中相关联的任务预分配和动态分配在以往的研究中却被独立研究, 这在一定程度上限制了任务分配技术的发展。
鉴于目前多目标优化下的任务分配问题基本停留在任务预分配阶段, 而动态分配阶段主要采用基于CNP的单目标优化方法, 本文提出一种基于选择的多/单目标优化转换思想, 依据任务预分配阶段中驾驶员对候选任务分配方案集的选择, 将预分配阶段的多目标优化问题转换为动态分配阶段的单目标优化问题, 在动态变化的战场环境中将决策者的主观偏好考虑其中, 利用CNP协商机制实现动态快速任务重分配。最后, 基于所提出的转换思想, 本文对任务分配领域中的多目标优化和单目标优化框架间的关系做出了深层次的讨论。
1 任务分配问题描述协同空战的任务分配体系运行流程如图 1所示。整个协同任务分配体系分为多目标优化下的任务预分配和单目标优化下的任务重分配2个阶段, 二者在逻辑上为承接关系。当驾驶员对预分配阶段的候选方案做出选择后, 整个协同编队进入任务执行阶段, 当战场环境发生改变时(我方编队成员故障、发现新的敌方目标等), 原有的分配方案不能满足新的任务需求, 此时决策系统开始任务重分配, 预分配与重分配二者共同组成一个完整的任务分配体系。

|
| 图 1 任务分配体系示意图 |
在协同任务分配中, 飞行员是决策的主体, 而任务分配系统则起辅助作用, 负责为飞行员提供多样化的候选分配方案, 进而充分发挥人的经验优势。本文以空间态势威胁和作战效能威胁为预分配阶段的2个目标函数, 构建如下的多目标优化模型

|
(1) |
式中:f1(X), f2(X)分别为空间态势威胁函数和作战效能威胁函数; X=(x1, x1, …, xm)表示决策变量的组合; m表示决策变量的维数; S表示满足约束条件的决策空间, 即可行域。
相对空间态势威胁主要由高度威胁、角度威胁、速度威胁、距离威胁构成。设协同任务中的某一时刻敌我双方编队中的2架战机空间态势如图 2所示。图中, dij表示我机i与敌机j的距离, Vi, Vj分别表示敌我战机的速度矢量, αi, βj分别表示我机速度矢量与目标线的夹角和敌机速度矢量与目标线的夹角(此处规定速度矢量左偏为负, 右偏为正)。

|
| 图 2 交战中的敌我战机空间态势示意图 |
设高度差hij表示敌机j高度减我机i高度所得差值, 单机高度威胁Thij可表示为
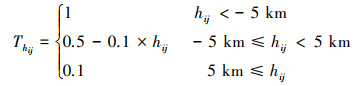
|
(2) |
单机角度威胁Taij可表示为

|
(3) |
单机速度威胁Tvij可表示为
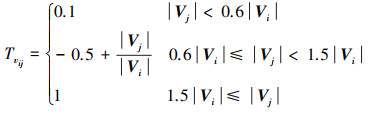
|
(4) |
当敌机携带的导弹和雷达探测能力优于我机时, 单机距离威胁Tdij可表示为
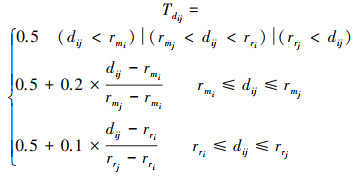
|
(5) |
当敌机携带的导弹和雷达探测能力劣于我机时

|
(6) |
(5)~(6)式中, rmi, rmj分别表示我方战机i和敌方战机j所携带的空空导弹的极限攻击范围; rri, rrj分别表示我方战机i和敌方战机j雷达的极限探测范围。
通常采用线性加权方式求取编队整体空间态势威胁。关于权重的选取, 常用的方法包括层次分析法[14]、灰色关联理论[15-16]等。为简化分析过程, 本文采用简单加权方法进行计算。
协同空战任务中的整体空间态势T可表示为

|
(7) |
式中, Th表示编队整体高度威胁, 可以通过我方所有战机所受到的高度威胁Thij求和得到, 同理可得编队整体角度威胁Ta、编队整体速度威胁Tv、编队整体距离威胁Td的取值。a1, a2, a3, a4分别为对应于各效能指标的权重, 且满足a1+a2+a3+a4=1。
计算敌我相对作战效能威胁时, 通过空战中的飞机类型获得该类飞机所对应的作战效能数据后按(8)式计算敌机j相对我机i作战效能威胁指数[17]。

|
(8) |
Ci表示我机i的作战效能指数, Cj表示敌机j的作战效能指数。
采用多目标粒子群算法[18-20]求解该多目标优化模型, 为突出主要研究内容, 此处不再对多目标骨干粒子群算法做具体展开, 具体实现方法可参考文献[21-24]。
1.2 单目标优化任务重分配作为预分配的承接, 本文采用多Agent理论[25]中主流的分布式CNP协商机制[26-27]求解转换后的单目标优化任务重分配问题, 使用改进后的CNP协商机制(在买卖合同之后引入交换合同[12])求解单目标优化问题。同样地, 有关改进CNP方法的具体实现方法可参考文献[28-29]。
1.3 多目标优化任务预分配结果我方编队的战机总数N=6, 敌方来袭战机总数M=10, 最终的多目标优化任务预分配结果如图 3所示。

|
| 图 3 对空拦截任务分配方案 |
所有候选任务分配方案在目标空间上的映射如图 3所示, 图中每个星形点对应一个候选任务分配方案(总共有14个)。
2 基于选择的多/单目标优化转换 2.1 转换思想的定性表述基于选择的多/单目标优化转换方法建立在决策者在多目标优化任务预分配阶段对于候选分配方案进行选择的基础之上。在多目标优化问题的最优解集中, 每一个最优解均在不同的目标函数上体现出其区别于其他最优解的优越性, 而这些优越性在更深层面上体现了决策者对于各个目标函数的权衡, 也可以将其理解为决策者的主观偏好。
因此, 若是将决策者的主观偏好看作是一个因人而异的单目标系统, 将Pareto最优解集中的所有元素看作是系统的输入, 将决策者对于候选分配方案的选择作为系统的输出, 那可以自然而然地将这种主观偏好看作是对于目标函数的加权操作。不同的选择既代表了不同的偏好也代表了不同的加权系数组合。也就是说, 可以根据决策者的选择反推出加权系数组合, 并依靠此组合将多目标优化问题转换为单目标优化问题, 然后应用CNP模型实现动态条件下的快速任务重分配, 使得任务分配系统站在决策者的角度自动协调编队成员的任务序列, 从而减轻决策者的负担。
2.2 转换思想的具体展开本文使用加权求和的方式进行转换操作, 假设任务预分配阶段有如图 4所示的候选任务分配方案集合。

|
| 图 4 一种可能的多目标分配方案 |
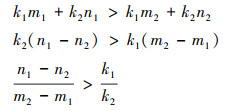
假设决策者在预分配阶段选择A2作为最终任务分配方案, 那么对于后续的单目标优化而言, 所采用的加权系数k1, k2的组合应保证A2的加权结果在所有候选方案的加权结果中是最小的(即威胁最小化), 这里k1+k2=1。
假设图 4中3个任务分配方案A1, A2和A3的坐标分别为(m1, n1), (m2, n2)和(m3, n3), 显然m1 < m2 < m3且n1>n2>n3, 根据上述讨论, 可得
|
(9) |
|
(10) |
合并(9)和(10)式, 可得(11)式
|
(11) |
通过(11)式的结果可知只有当A2位于A1与A3连线的下方时, 才能够找到一组合适的权重取值, 使得A2加权后的结果取得三者中的最小值。同理可以将此结论推广到整个候选任务分配方案集中, 即在目标空间中, 当A2两侧的候选任务分配方案的连线均在A2上方时, 可以找到一组权重组合, 使得A2加权后的结果在所有候选方案中取得最小值。
为便于直观理解, 现对图 5中不同的解集分布情形加以描述: 称具有如图 5a)中所示位置分布的方案为权重方案; 称具有如图 5b)中所示位置分布的方案为非权重方案。

|
| 图 5 2种可能出现的解集分布情形 |
在多目标优化下的任务预分配中, 当决策者选择的方案是权重方案时, 可直接求得权重系数组合; 当决策者选择的方案是非权重方案时, 可就近选取目标空间上距离该方案最近的权重方案来求得权重组合, 并以此近似描述决策者的偏好。
综上所述, 在决策者对任务预分配阶段的候选任务分配方案集做出选择后, 就可以求得一组目标函数的权重组合, 进而在不丢失决策者主观偏好的前提下将一个多目标优化问题转变为一个单目标优化问题, 从而为后续任务重分配创造条件。
3 转换思想的仿真验证 3.1 仿真验证流程为验证多/单目标优化转换思想的正确性, 按照以下步骤进行仿真验证:
步骤1 将2个目标函数下任务分配方案的仿真结果作为任务预分配阶段产生的候选分配方案集, 如所图 3所示;
步骤2 人为选择不同的任务分配方案并计算出每种方案所对应目标函数的权重组合;
步骤3 利用步骤2中求得的权重组合, 采用加权求和的方式完成多/单目标优化问题的转换;
步骤4 使用单目标粒子群算法求解转换后的单目标优化问题, 如果最终结果与决策者在步骤2中选择的结果一致, 则说明多目标优化和单目标优化之间的权重关系是正确的。
3.2 仿真结果分析为了平衡目标函数的取值范围对权重取值的影响, 首先将候选任务分配方案进行归一化处理, 如(12)式所示
|
|
(12) |
式中: Nf1(n), Nf2(n)分别为归一化后目标函数f1, f2的取值。
归一化后的任务预分配阶段的仿真结果如图 6所示。

|
| 图 6 归一化后的候选任务分配方案集 |
在任务预分配阶段, 假设决策者分别选取3种权重方案A, B, C, 则3种选择对应的一组可能的权重系数组合如表 1所示。
根据表 1中3种权重组合, 通过目标函数加权求和方式, 分别将多目标优化问题转换为3个不同的单目标优化问题, 使用单目标粒子群算法求解后的任务分配结果如图 7所示。求解由权重组合确定的单目标优化问题后, 所得的新任务分配方案在目标空间上的分布与多目标优化时的分布情况一致。进一步地给出具体的最优分配方案编码, 如表 2所示。将3种选择对应的单目标优化结果与多目标优化任务预分配结果进行对比, 可以发现粒子编码结果完全一致。由此可以说明, 在目标函数加权求和方式下, 单目标优化结果实际上是多目标优化结果中的一个解, 且随着权重组合的改变, 单目标优化结果会在多目标优化的Pareto前沿上移动。当权重组合的确定取决于决策者对预分配方案的选择时, 这就验证了本节所提出的基于选择的多/单目标转化思想的正确性。

|
| 图 7 单目标优化下3种任务分配方案的分布情况 |
| 选择的任务分配方案 | 最优粒子的编码 | 空间态势威胁 | 作战效能威胁 | |||||||||
| A | 1 | 5 | 3 | 3 | 5 | 6 | 6 | 4 | 6 | 4 | 0.009 12 | 0.923 08 |
| B | 1 | 5 | 3 | 3 | 5 | 6 | 2 | 4 | 2 | 4 | 0.342 60 | 0.461 54 |
| C | 1 | 5 | 3 | 3 | 5 | 2 | 2 | 4 | 2 | 1 | 0.651 67 | 0.153 85 |
为了体现出决策者的选择对于任务重分配结果的影响, 此处假设在多目标任务预分配阶段, 共有3位决策者分别选择了如图 6所示3种不同的候选任务分配方案A, B, C, 为表述方便, 简称为情形A, B, C。分别使用表 1所示的权重系数组合对2个目标函数加权求和, 可以得到3个单目标优化函数(即总体威胁)。
本实验考虑协同作战的典型情况为我方飞机发生故障被迫退出战场, 并在此情况下进行任务重分配。假设在任务执行过程中, 我方编队中编号为5的飞机因自身故障被迫退出战场, 为保证作战顺利完成, 飞机5自身任务序列中的任务需要被重新分配给其余编队成员。
4.1 仿真结果对应于情形A, B, C, 使用CNP协商框架进行任务重分配, 具体仿真结果如图 8所示。

|
| 图 8 3种情形下CNP算法运行结果 |
图 8中曲线表示不同情形下的作战总体效能随CNP算法迭代次数的变化, 可以看出, 3种情形下, CNP算法均可以在很小的迭代次数内实现任务重分配。每种情形下, 总体效能具有不同的初值和终值, 这也是权重组合差异的体现。仿真实验表明, 任务重分配所需时间控制在0.5 s以内, 算法具有良好的实时性。
3种情形下任务重分配方案编码结果(即3种分配方案)及其所对应的目标函数取值如表 3所示。
| 任务重分配情形 | 最优粒子的编码 | 空间态势威胁 | 作战效能威胁 | |||||||||
| A | 1 | 2 | 3 | 3 | 2 | 6 | 6 | 4 | 6 | 4 | 0.086 37 | 0.923 08 |
| B | 1 | 2 | 3 | 3 | 2 | 6 | 6 | 4 | 2 | 4 | 0.213 64 | 0.692 31 |
| C | 1 | 2 | 3 | 3 | 1 | 6 | 2 | 4 | 2 | 1 | 0.591 22 | 0.384 62 |
通过表 3可以发现, 由于我方飞机5退出战场, 原先被分配任务的飞机对自身任务序列进行了一定的调整, 情形A和情形C中, 在预分配阶段未被分配任务的飞机2和6也开始承担部分任务; 同时由于权重组合的不同, 不同情形下的任务重分配方案在空间态势威胁和作战效能威胁的取值上也不同。
4.2 仿真结果对比分析采用不同权重组合, 对不同情形A, B, C进行任务重分配, 结果对应的总体威胁如表 4所示。
| 任务重分配情形 | 权重组合A | 权重组合B | 权重组合C |
| A | 0.278 82 | 0.496 36 | 0.588 40 |
| B | 0.323 73 | 0.448 19 | 0.500 84 |
| C | 0.543 70 | 0.489 98 | 0.467 26 |
表 4中每一列表示对应单目标优化的目标函数, 观察每一列的总体效能, 可以发现, 协同作战的总体威胁在权重组合与情形相匹配时(即权重组合A对应情形A)会取得最小值。进一步可以验证, 对于某一特定的权重组合, 在所有可能的重分配方案中, 只有与对应的情形相匹配, 才能获得最小的总体威胁值。
3种任务重分配方案下的空间态势威胁以及作战效能威胁取值如图 9所示。

|
| 图 9 3种情形下任务重分配方案效能对比图 |
参考图 9中3种方案选择在目标空间上的分布, 不难发现, 情形A下(决策者在预分配阶段选择方案A), 由于决策者更加偏好作战效能, 因此该情形下的任务重分配结果也会侧重于作战效能而非空间态势; 情形C下则正相反, 任务重分配的结果会将空间态势作为首要考虑因素; 情形B相当于情形A和情形C的权衡, 任务重分配结果则兼顾2个效能指标。
综合4.1节与本节中的仿真结果与分析, 可以证明, 本文所提出的基于选择的多/单目标优化转换思想能够将决策者在任务预分配阶段的主观偏好带入到后续的动态任务重分配中, 从而分别在多目标优化与单目标优化、任务预分配与任务重分配之间搭建起连接的桥梁。
4.3 多目标优化和单目标优化之间联系的进一步讨论在任务预分配阶段, 可得到候选任务分配方案集中非权重方案的分布情况, 如图 10所示。

|
| 图 10 3种情形下CNP算法运行结果 |
根据(9)~(11)式可知, 对于非权重方案, 在加权求和方式下, 决策系统在考虑决策者主观偏好的同时, 事实上不存在一种对应的权重组合能够将多目标优化问题成功转换为单目标优化问题, 也就无法继续后续的基于CNP的任务重分配操作。因此对于这种可能出现的选择, 本文建议根据欧氏距离选择距离非权重方案最近的权重方案加以替代, 以便后续CNP任务重分配的开展。
由于目前绝大多数关于单目标优化下的协同作战任务分配问题的研究中, 往往采用各种性能指标加权求和的方式来获得总体效能函数, 因此, 无论如何改变权重系数的组合, 单目标优化算法都会遗漏一些有价值的任务分配方案(即非权重方案), 这体现出了单目标优化下的任务分配算法的局限性; 与此相反, 多目标优化下的任务分配结果则可以覆盖所有的单目标优化结果。一言以蔽之, 单目标优化结果是多目标优化解集的一个元素。
针对目前单目标优化算法自身的这一局限性, 日后的研究中可以尝试通过构建新的加权方式来加以弥补。
5 结论为了实现战斗中的快速任务重分配、增加任务重分配的适应性, 本文以多目标优化下的协同对空拦截任务分配问题为切入点, 通过分析候选分配方案集中各个任务分配方案间的内在联系, 创新性地提出了一种基于选择的多/单目标优化转换思想, 该方法可以根据决策者对于候选任务分配方案的选择结果确定出决策者对每个目标函数的偏好权重, 当战场条件改变时, 根据已求得的目标函数权重, 完成多/单目标转换, 并实现作战任务的快速重分配。这种转变思想为当前的研究提供了一种新的观点与建议。仿真结果证明了所提出的多/单目标转化思想的正确性以及其在动态任务重分配中的桥梁作用。最后对多/单目标任务分配之间的关系进行了深层次的讨论。需要指出, 本文的转换思想不仅仅针对任务重分配问题, 它同样适用于广义上的多/单目标优化转化问题。
| [1] |
麻士东, 龚光红, 韩亮, 等. 目标分配的蚁群-模拟退火算法及其改进[J]. 系统工程与电子技术, 2011, 33(5): 1182-1186.
MA Shidong, GONG Guanghong, HAN Liang, et al. Hybrid strategy with ant colony and simulated annealing algorithm and its improvement in target assignment[J]. Systems Engineering and Electronics, 2011, 33(5): 1182-1186. (in Chinese) DOI:10.3969/j.issn.1001-506X.2011.05.44 |
| [2] |
刘少伟, 王洁, 杨明, 等. 防空C3I目标分配问题的ACO-SA混合优化策略研究[J]. 系统工程与电子技术, 2007(11): 1886-1890.
LIU Shaowei, WANG Jie, YANG Ming, et al. Research of ACO-SA optimization strategy for solving target assignment problem in air-defense C3I system[J]. Systems Engineering and Electronics, 2007(11): 1886-1890. (in Chinese) DOI:10.3321/j.issn:1001-506x.2007.11.024 |
| [3] | LI K, YAN X, HAN Y. Multi-mechanism swarm optimization for multi-UAV task assignment and path planning in transmission line inspection under multi-wind field[J]. Applied Soft Computing, 2024, 150: 111033. DOI:10.1016/j.asoc.2023.111033 |
| [4] | NALLOLLA C A, P V, CHITTATHURU D, et al. Multi-objective optimization algorithms for a hybrid AC/DC microgrid using RES: a comprehensive review[J]. Electronics, 2023, 12(4): 1062. DOI:10.3390/electronics12041062 |
| [5] | DOLATNEZHADSOMARIN A, KHORRAM E. Two efficient algorithms for constructing almost even approximations of the Pareto front in multi-objective optimization problems[J]. Engineering Optimization, 2019, 51(4): 567-589. DOI:10.1080/0305215X.2018.1479405 |
| [6] | FROMER J C, COLEY C W. Computer-aided multi-objective optimization in small molecule discovery[J]. Patterns, 2023, 4(2): 100678. DOI:10.1016/j.patter.2023.100678 |
| [7] | KONAK A, COIT D W, SMITH A E. Multi-objective optimization using genetic algorithms: a tutorial[J]. Reliability Engineering & System Safety, 2006, 91(9): 992-1007. |
| [8] |
张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495.
ZHANG Yunfei, LIN Defu, ZHENG Duo, et al. Task allocation and trajectory optimization of uav for multi-target time-space synchronization cooperative attack[J]. Acta Armamentarii, 2021, 42(7): 1482-1495. (in Chinese) DOI:10.3969/j.issn.1000-1093.2021.07.016 |
| [9] | ZHANG M, LI W, WANG M, et al. Helicopter-UAVs search and rescue task allocation considering UAVs operating environment and performance[J]. Computers & Industrial Engineering, 2022, 167: 107994. |
| [10] |
钱艳平, 夏洁, 刘天宇. 基于合同网的无人机协同目标分配方法[J]. 系统仿真学报, 2011, 23(8): 1672-1676.
QIAN Yanping, XIA Jie, LIU Tianyu. Task assignment scheme based on contract net[J]. Journal of System Simulation, 2011, 23(8): 1672-1676. (in Chinese) |
| [11] |
李娟, 张昆玉. 基于改进合同网算法的异构多AUV协同任务分配[J]. 水下无人系统学报, 2017, 25(6): 418-423.
LI Juan, ZHANG Kunyu. Heterogeneous multi-AUV cooperative task allocation based on improved contract net algorithm[J]. Journal of Unmanned Undersea Systems, 2017, 25(6): 418-423. (in Chinese) |
| [12] |
龙涛, 陈岩, 沈林成. 基于合同机制的多UCAV分布式协同任务控制[J]. 航空学报, 2007(2): 352-357.
LONG Tao, CHEN Yan, SHEN Lincheng. Distributed cooperative mission control based on contract mechanism for multiple unmanned combat aerial vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2007(2): 352-357. (in Chinese) DOI:10.3321/j.issn:1000-6893.2007.02.020 |
| [13] | ZHANG Z, LIU H, WU G. A dynamic task scheduling method for multiple UAVs based on contract net protocol[J]. Sensors, 2022, 22(12): 4486. DOI:10.3390/s22124486 |
| [14] | CUI H, ZHANG H, ZHOU L, et al. Fuzzy analytic hierarchy process with ordered pair of normalized real numbers[J]. Soft Computing, 2023, 27: 12267-12288. DOI:10.1007/s00500-023-08232-7 |
| [15] | LIU P, FU Y, WANG P, et al. Grey relational analysis-and clustering-based opinion dynamics model in social network group decision making[J]. Information Sciences, 2023, 647: 119545. DOI:10.1016/j.ins.2023.119545 |
| [16] | MUTHANA S A, KU-MAHAMUD K R. Taguchi-grey relational analysis method for parameter tuning of multi-objective pareto ant colony system algorithm[J]. Journal of Information and Communication Technology, 2023, 22(2): 149-181. |
| [17] |
陈志伟. 无人机空战攻防一体化自主攻击决策研究[D]. 南京: 南京航空航天大学, 2011 CHEN Zhiwei. Research on the autonomous attack decision of UAVs attack and defense integration[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011 (in Chinese) |
| [18] | LEI J, YANG C, ZHANG H, et al. Radiation shielding optimization design research based on bare-bones particle swarm optimization algorithm[J]. Nuclear Engineering and Technology, 2023, 55(6): 2215-2221. DOI:10.1016/j.net.2023.02.018 |
| [19] | CLERC M, KENNEDY J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space[J]. IEEE Trans on Evolutionary Computation, 2002, 6(1): 58-73. DOI:10.1109/4235.985692 |
| [20] | COELLO C A C, PULIDO G T, LECHUGA M S. Handling multiple objectives with particle swarm optimization[J]. IEEE Trans on Evolutionary Computation, 2004, 8(3): 256-279. DOI:10.1109/TEVC.2004.826067 |
| [21] | HAN H, ZHANG L, YING A A, et al. Adaptive multiple selection strategy for multi-objective particle swarm optimization[J]. Information Sciences, 2023, 624: 235-251. DOI:10.1016/j.ins.2022.12.077 |
| [22] | ERWIN K, ENGELBRECHT A. Multi-guide set-based particle swarm optimization for multi-objective portfolio optimization[J]. Algorithms, 2023, 16(2): 62. DOI:10.3390/a16020062 |
| [23] | LIN Q, LI J, DU Z, et al. A novel multi-objective particle swarm optimization with multiple search strategies[J]. European Journal of Operational Research, 2015, 247(3): 732-744. DOI:10.1016/j.ejor.2015.06.071 |
| [24] | ZHU Q, LIN Q, CHEN W, et al. An external archive-guided multiobjective particle swarm optimization algorithm[J]. IEEE Trans on Cybernetics, 2017, 47(9): 2794-2808. DOI:10.1109/TCYB.2017.2710133 |
| [25] | VENGATTARAMAN T, ABIRAMY S, DHAVACHELVAN P, et al. An application perspective evaluation of multi-agent system in versatile environments[J]. Expert Systems with Applications, 2011, 38(3): 1405-1416. DOI:10.1016/j.eswa.2010.07.047 |
| [26] | KODAMA J, HAMAGAMI T, SHINJI H, et al. Multi-agent-based autonomous power distribution network restoration using contract net protocol[J]. Electrical Engineering in Japan, 2009, 166(4): 56-63. DOI:10.1002/eej.20661 |
| [27] | GU W, LI Y, TANG D, et al. Using real-time manufacturing data to schedule a smart factory via reinforcement learning[J]. Computers & Industrial Engineering, 2022, 171: 108406. |
| [28] | LIU B, DENG M, WU G, et al. Bottom-up mechanism and improved contract net protocol for the dynamic task planning of heterogeneous earth observation resources[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(10): 6183-6196. DOI:10.1109/TSMC.2022.3143158 |
| [29] | SAXENA S, FARAG H E Z. Distributed voltage regulation using permissioned blockchains and extended contract net protocol[J]. International Journal of Electrical Power & Energy Systems, 2021, 130: 106945. |
2. No.1 Military Representative Office of Equipment Department of PLA Airforce in Shenyang, Shenyang 110850, China
