



2. 空间光电探测与感知工业和信息化部重点实验室, 江苏 南京 211106
近年来, 随着人类对太空的不断探索, 越来越多的卫星被发射升空。卫星具有视点高、覆盖范围广、传送信息量大等优点, 直接影响战局的发展甚至结果。为掌握未来战争的主动权, 利用微小卫星进行空间攻防成为新的研究热点[1-2]。然而, 现有研究均基于目标与追踪星位于同一轨道面内的假设展开, 对于快速接近异面非合作目标过程中的目标定位研究相对较少。
非合作目标精确定位是实现精确交会的前提, 在满足微小卫星质量和功率限制的情况下, 光学传感器被视为最佳选择[3], 但是仅利用视线角实现目标精确定位是一难点。虽然大量研究表明使用单颗卫星的仅视线定位系统是可观的, 但该系统只含有目标的视线角信息, 缺乏距离信息, 导致定位误差较大[4]。Geller等[5]为提高系统可观性, 提出采用相机偏置法间接引入距离信息, 降低了目标定位误差, 但是仅在近距离测量条件下可用。通过采用特定的轨道机动方式, 可以引入潜在的距离信息, 从而改善对目标的定位精度[6-7],但是, 燃料有限的微小卫星并不适用。Li等[8]改进了定位滤波算法, 提出采用平方根无迹滤波算法改善中远距离的目标定位性能, 但是受复杂的动力学模型与sigma采样点的影响, 滤波算法收敛缓慢。
利用多视线协同是解决单视线定位可观性较差的有效手段[9-10]。王楷等[11]研究了基于双视线的仅角度相对导航算法, 并对双追踪航天器与目标间的构型进行研究, 提出当三者共线时, 系统退化为单视线测量, 定位性能急剧下降。韩飞等[12]利用轨道摄动优化伴飞机器人相对中心机器人的绕飞构型, 给出了兼顾可观测度和长期自然维持的多伴飞机器人构型优化方法。LeGrand等[13-14]对基于双目视觉的初始相对轨道确定问题进行了研究, 提出利用2个相机的视线角估计目标的相对位置, 并在此基础上构建了参数化概率分布, 以反映相对距离的不确定性, 进一步提高目标定位的精度。
上述研究证明了多视线协同可以显著提高仅测角导航的可观测度, 但仍需要进一步研究。一方面, 大部分假设追踪星和目标在同一轨道平面上, 基于相对动力学方程建立了状态模型。若追踪星和目标不在同一轨道平面上, 相对运动学方程就不再适用, 需要采用新的仅视线测量定位方案。另一方面, 接近过程中追踪星和目标的几何构型直接影响目标定位估计的性能, 但目前的构型优化算法都是基于相对动力学模型提出的, 通过分析几何构型的变化推导系统误差的传播规律, 并分析其中的影响因素。该方法不适用于异面目标, 因此需要提出新的构型优化算法, 以提高目标定位的精度。
本文就快速接近异面非合作目标过程中的目标定位问题, 首先提出双视线协同仅测角定位方案, 采用含J2项摄动的轨道动力学方程为状态方程, 双追踪星对目标的视线角为量测方程, 设计了基于扩展卡尔曼滤波器(extended Kalman filter, EKF)的目标定位算法; 由于双星接近过程的构型直接影响目标定位估计的性能, 提出基于正态分布交叉(normal distribution crossover, NDX)、可变变异分布指数、引入模拟灾变改进的非支配排序遗传算法Ⅱ(non-dominated sorting genetic algorithm Ⅱ, NSGA-Ⅱ)用于构型优化; 最后, 以标准多目标测试函数ZDT1作为测试函数进行测试, 结果表明, 与传统算法相比, 本文提出的优化算法更逼近真实的Pareto前沿, 并且具有更快的收敛速度。此外, 通过数值仿真验证了双视线协同定位系统可观性较强, 且经过构型优化后, 目标定位的精度得到显著提高, 滤波收敛后的位置均方差仅为6.4 m。
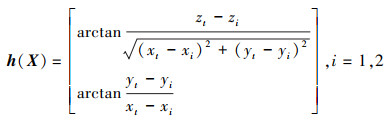
1 双视线协同定位方案本文提出的双视线协同定位方案如图 1所示, 双追踪星与目标位于不同轨道面内, 交会时机确定后, 2颗追踪星从不同的停泊轨道出发, 迅速接近目标。在接近过程中, 追踪星利用星载GNSS获得自身的位置信息, 并通过星载相机测量非合作目标相对自身的方位角βt1, βt2和俯仰角αt1, αt2, 通过滤波估计, 得到目标的位置与速度信息。研究表明, 接近过程中追踪星与目标构成的几何关系直接影响目标定位性能。本方案中2颗追踪星可从不同停泊轨道出发, 进而改变接近过程中的几何构型, 为后续构型优化奠定基础。

|
| 图 1 协同定位示意图 |
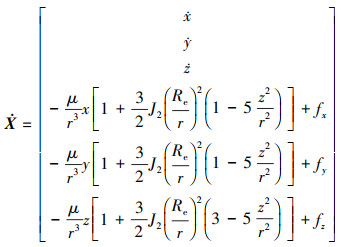
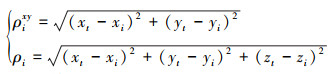
非合作目标与追踪星的轨道平面夹角较大, 相对距离远, 相对动力学方程不再适用, 因此本文在J2000惯性系下描述目标的位置与速度。设在J2000坐标系下的目标状态量为 
|
(1) |
式中: μ为地球引力常数; Re为地球平均半径; r为航天器的地心距; fx, fy, fz分别为地球非球形摄动的高阶项、日月摄动、太阳光压摄动和大气摄动影响总和的三轴分量。
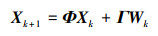
对(1)式进行线性化, 以时间T作为离散步长, 可得
|
(2) |
式中:
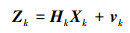
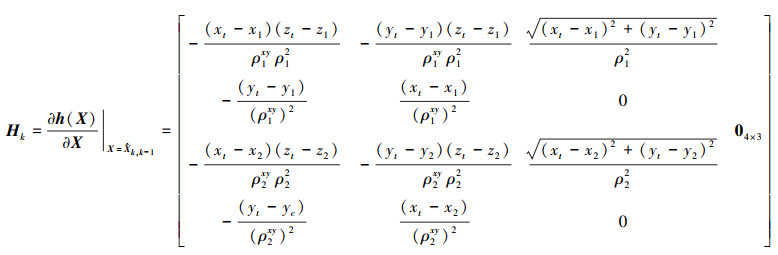
根据图 1所示关系, 系统的量测方程为

|
(3) |
|
(4) |
式中, v为量测噪声。
对(3)式在 
|
(5) |
|
(6) |
|
(7) |
本文采用EKF算法对非合作目标进行定位解算
|
(8) |
式中: Qk-1为系统噪声协方差阵; Rk为量测噪声协方差阵; Pk为估计误差协方差阵。
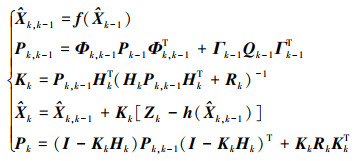
3 接近构型优化模型传统构型优化方法假设追踪星与目标位于同一轨道面内, 并基于CW(Clohessy-Wiltshire)方程建立目标相对动力学模型, 根据相对动力学特性, 解耦为垂直于轨道平面和轨道平面内2种运动方式, 最后根据几何构型的变化推导系统误差传播规律, 并分析其中的影响因素。但当追踪星与目标异面时, CW方程不再适用, 根据几何构型的变化趋势推导系统误差传播规律十分困难, 直接求解最优的双星接近构型较难实现。因此本文将此场景转化为多目标优化问题, 将2颗追踪星停泊轨道的轨道高度与变轨时对应的真近点角作为待寻优参数, 以目标位置估计的均方根误差(root mean squared error, RMSE)最小、变轨总能耗最小和交会时长最小为目标函数, 如(9)式所示, 使用改进的NSGA-Ⅱ进行寻优并确定相关参数。
|
(9) |
式中:f1为目标位置估计的RMSE; f2为变轨总能耗; f3为交会时长; ri为i时刻目标位置真值; 
NSGA-Ⅱ算法是Deb等[15-16]在NSGA算法基础上提出的一种多目标优化算法, 对NSGA算法存在的部分缺点进行了改进: ①引入快速非支配排序法对种群中的所有个体进行分层, 极大降低了计算的复杂度; ②使用拥挤度的概念代替共享适应原则, 不仅无需人为给定参数共享半径, 而且保证了种群个体的多样性; ③通过精英保留策略, 达成保留优秀个体淘汰较差个体的目的, 使种群朝着最优的方向进化。
相对于NSGA算法, NSGA-Ⅱ算法降低了算法复杂度, 改善了收敛性和收敛速度, 但仍旧存在搜索能力差、易陷入局部最优解、收敛速度慢等不足。因此本文根据接近过程中定位性能优化的特点, 从三方面对算法进行改进。
4.1 NDX算子与传统的模拟二进制交叉(simulated binary crossover, SBX)相比, NDX算子一方面不再局限于父代附近搜索, 将正态分布随机变量引入到交叉环节, 扩大了子代的移动空间, 搜索空间更为广阔,; 另一方面, 对父代基因离散重组, 使新个体具有更广阔的取值空间, 更易跳出局部最优, 进一步扩大了算子的搜索空间。为使NDX算子具有与传统算子相同的搜索概率, A取常值1.481。
|
(10) |
式中: y1j为第1个子代的第j个基因; y2j为第2个子代的第j个基因; x1j为第1个父代的第j个基因; x2j为第2个父代的第j个基因; N(0, 1)为正态分布随机变量; r(j)∈(0, 1)且服从均匀分布。
4.2 可变变异分布指数传统NSGA-Ⅱ算法中的变异分布指数为常数, 不能随着种群的进化情况适当改变。本文提出变异分布指数按照余弦函数的方式变化, 如(11)式所示, 变异分布指数在区间[0, ηmax]内变化, 随迭代次数的增多而逐渐递减。在算法的早期阶段变异分布指数变化缓慢, 利于算法的全局搜索, 后期变异分布指数变化迅速, 将搜索空间缩小至最优解附近, 加快收敛速度。综上, 变异分布指数按照余弦函数的方式变化, 改善了NDX算子搜索空间广阔导致收敛速度慢的缺点, 既不影响算法前期全局搜索的效率, 又加快了后期收敛的速度。
|
(11) |
式中:ηi为第i代种群的变异分布指数;ηmax为最大变异分布指数;i为当前迭代种群数;n为最大迭代次数。
4.3 模拟灾变NSGA-Ⅱ算法在交叉变异生成子代时, 一般会生成大量重复的个体, 重复个体一旦在种群中占有优势, 多数子代会保留这些重复个体的基因特性, 从而造成算法早熟, 且会降低解的分布多样性, 不利于算法优化效果的提高。对此, 本文采用模拟灾变的方式进行人为干预, 通过剔除部分重复个体, 并再次初始化部分种群个体, 使算法跳出当前解空间, 继续搜索全局最优解。
改进NSGA-Ⅱ算法对构型优化流程如图 2所示。

|
| 图 2 构型优化流程图 |
目标位于轨道倾角53°、升交点赤经0°、轨道高度1 110 km的圆轨道, 2颗追踪星初始停泊轨道不同, 但轨道倾角均为58°、升交点赤经均为0°。为降低追踪星的变轨能耗, 尽量不进行轨道面外的机动, 将交会点设计为非合作目标运行轨道与追踪星所在轨道面的交点, 2颗追踪星在同一时刻变轨快速接近目标, 如图 3所示。

|
| 图 3 交会示意图 |
在第2节建立的双视线协同定位系统是离散非线性时变系统, 对系统进行定常简化, 其可观测矩阵为
|
(12) |
对于在任意时刻k, 可观测矩阵Ok维数为4n且要大于状态量Xk的维数, 因此n≥2。
本文以条件数的倒数作为衡量系统可观性的标准参数, 可观测度[17]的定义为
|
(13) |
式中, σmax(O)和σmin(O)分别代表可观测矩阵O的最大和最小奇异值。其中0≤D(O)<1, 当D(O)=0时, 表明此时系统不可观测; 当D(O)>0时, 表明系统可观测, 且可观测度越大, 系统的估计精度也就越高。
双视线协同定位系统的可观测度随时间的变化如图 4所示。分析可知, 随着时间的推移, 2颗追踪星之间的距离不断减小, 双星定位逐渐退化为单星定位, 导致可观测度逐渐下降。然而, 可观测度仍然保持在较高水平, 说明该系统具有较强的可观测性。

|
| 图 4 系统可观测度 |
为比较改进NSGA-Ⅱ算法和传统NSGA-Ⅱ算法的性能, 利用标准多目标测试函数ZDT1(见(14)式)进行测试。其中, 种群规模50, 最大迭代次数500, 最大变异分布指数10。2种算法的Pareto解集分布如图 5所示, 与传统算法相比, 改进的NSGA-Ⅱ算法更逼近真实的Pareto前沿, 表明改进的NSGA-Ⅱ算法能够更全面地探索潜在的优质解, 克服了传统算法易陷入局部收敛的问题。
|
(14) |

|
| 图 5 ZDT1的Pareto前沿 |
为验证NDX算子的优越性, 选择0.3和0.7作为父代, 在[0, 1]区间内使用NDX算子与传统算子(SBX)各生成1 000个子代, 子代分布如图 6所示, 基于SBX算子生成的子代大多集中于[0.3, 0.4]与[0.7, 0.8]区间内, 即在父代附近搜索, 而基于NDX算子生成的子代遍布所有区间。这表明NDX算子能够扩展搜索空间, 涵盖更多的非支配解, 更易跳出局部最优, 从而更接近真实的Pareto前沿。

|
| 图 6 子代分布图 |
为说明可变变异分布指数对算法的优化, 定义如(15)式所示的接近程度参数, 依旧采用ZDT1为测试函数, 比较收敛速度。接近程度参数体现每次迭代结果与最优解的接近程度, 结果越小, 表明寻优过程中每次迭代结果越接近最优解, 寻优的效率和精度越高。如图 7所示, 两算法均能在迭代结束时到达全局最优位置, 传统算法在第360代时收敛, 当变异分布指数可变时, 改进的算法在第260代时收敛, 提前了100代收敛, 表明变异分布指数按余弦函数变化可大幅提高算法的收敛速度, 而不影响收敛精度。
|
(15) |

|
| 图 7 收敛曲线 |
式中:di为第i次迭代接近程度参数;fi为第i次迭代最优解的目标函数;fbest为迭代结束时全局最优解的目标函数;M为目标函数维数。
在时间一定的前提下, 使用改进NSGA-Ⅱ算法与传统算法优化接近构型, 并对比2种算法的Pareto解集, 如图 8所示, 传统算法和改进NSGA-Ⅱ算法求解出Pareto解集的目标函数变化趋势相同。随着位置估计RMSE的减少, 变轨总能耗增加, 即二者成反比。但是与传统算法相比, RMSE相近的情况下, 改进NSGA-Ⅱ的变轨总能耗更小, 即改进NSGA-Ⅱ求解得出的方案性能更优, 且改进NSGA-Ⅱ算法所求得的Pareto解集分布范围更广, 优质解数量更多。

|
| 图 8 2种算法的Pareto解的分布 |
综上所述, 通过对标准多目标测试函数ZDT1和接近构型优化模型的测试, 得出以下结论: 改进NSGA-Ⅱ算法具有更广阔的搜索空间, 能够避免陷入局部最优解, 解集的分布明显优于传统算法, Pareto前沿更加贴近真实的前沿, 且算法的收敛速度更快。此外, 改进NSGA-Ⅱ算法也能产生更多的高质量解。
5.4 改进NSGA-Ⅱ算法对构型优化仿真步长为1 s。光学传感器量测精度, 方位角与俯仰角均为0.005 7°。滤波器初始的位置误差三轴均为1 000 m,速度误差三轴均为10 m/s。
使用改进NSGA-Ⅱ算法对构型进行优化, 优化结果如表 1所示。第2, 4组构型的目标位置估计的RMSE较小, 但总能耗很高; 虽然第3组构型总能耗最小, 但其目标位置估计的RMSE很大; 第1, 5组构型的交会时间相近, 但第1组的总能耗与目标位置估计的RMSE均优于第5组。因此选定第1组构型为最优构型。
| 构型 | 轨道高度1/km | 真近点角1/(°) | 轨道高度2/km | 真近点角2/(°) | 时间/s | 总能耗/(m·s-1) | RMSE/m |
| 1 | 1 113.05 | 102.7 | 1 088.36 | 105.24 | 1 852 | 171.7 | 6.4 |
| 2 | 1 142.97 | 103.84 | 1 038.17 | 98.41 | 1 818 | 523.7 | 4.9 |
| 3 | 1 126.64 | 95.9 | 1 070.81 | 96.78 | 1 721 | 0.6 | 20.7 |
| 4 | 1 102.43 | 103.32 | 1 094.76 | 108.54 | 1 875 | 373.1 | 4.8 |
| 5 | 1 110.61 | 102.97 | 1 102.81 | 105.78 | 1 846 | 219.6 | 7.1 |
优化构型与未优化构型2种情况下, 目标定位三轴误差的仿真结果如图 9所示。图中虚线为最优构型下的目标定位误差, 双视线协同定位算法滤波600 s收敛后, 对非合作目标单轴的定位误差均在10 m以内, 位置均方差为6.4 m。图中实线为构型优化前的目标定位误差, 双视线协同定位算法滤波800 s收敛后, 定位误差均在25 m以内, 位置均方差为23.4 m。与未优化的相比, 构型优化后定位精度明显提高且收敛迅速, 说明优化追踪星的接近构型, 可提高定位估计的性能。此时, 两追踪星变轨能耗分别为60 m/s与111.7 m/s, 未优化的总能耗为331.8 m/s, 约节省了50%的能耗。

|
| 图 9 目标位置误差曲线图 |
本文研究了快速接近异面非合作目标过程中的目标定位问题。提出了双视线协同仅测角定位方案与算法; 由于双星接近过程的构型直接影响目标定位估计的性能, 从三方面改进了NSGA-Ⅱ算法, 并将其用于接近构型的优化。与传统算法相比, 本文提出的优化算法更接近真实的Pareto前沿, 并且具有更快的收敛速度。此外, 双视线协同定位系统可观性较强, 且经过构型优化后, 目标定位的精度得到显著提高, 滤波收敛后的位置均方差仅为6.4 m。
| [1] |
林来兴. 国外微小卫星在空间攻防中的应用研究[J]. 装备指挥技术学院学报, 2006(6): 47-49.
LIN Laixing. Research on the application of foreign micro-satellite in space attack and defense[J]. Journal of Equipment Command Technology Institute, 2006(6): 47-49. (in Chinese) |
| [2] | STSVER D. Battlefield space[J]. Popular Science, 2005(11): 11-13. |
| [3] | OPROMOLLA R, FASANO G, RUFINO G, et al. A review of cooperative and uncooperative spacecraft pose determination techniques for close-proximity operations[J]. Progress in Aerospace Sciences, 2017, 93: 53-72. DOI:10.1016/j.paerosci.2017.07.001 |
| [4] | ARDAENS J S, GAIAS G. Angles-only relative orbit determination in low earth orbit[J]. Advances in Space Research, 2018, 61(11): 2740-2760. DOI:10.1016/j.asr.2018.03.016 |
| [5] | GELLER D K, KLEIN I. Angles-only navigation state observability during orbital proximity operations[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(6): 1976-1983. DOI:10.2514/1.G000133 |
| [6] | PI J, BANG H. Trajectory design for improving observability of angles-only relative navigation between two satellites[J]. The Journal of the Astronautical Sciences, 2014, 61: 391-412. DOI:10.1007/s40295-014-0016-y |
| [7] | HOU B, WANG D, WANG J, et al. Optimal maneuvering for autonomous relative navigation using monocular camera sequential images[J]. Journal of Guidance, Control, and Dynamics, 2021, 44(11): 1947-1960. DOI:10.2514/1.G005706 |
| [8] | LI F, CAO X, YOU Y, et al. Case study: feasibility analysis of close-in proximity operations using angles-only navigation[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2020, 63(2): 31-41. DOI:10.2322/tjsass.63.31 |
| [9] | FRANQUIZ F J, MUÑOZ J D, UDREA B, et al. Optimal range observability maneuvers of a spacecraft formation using angles-only navigation[J]. Acta Astronautica, 2018, 153: 337-348. DOI:10.1016/j.actaastro.2018.02.003 |
| [10] | CHEN T, XU S J. Approach guidance with double-line-of-sight measuring navigation constraint for autonomous rendezvous[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(3): 678-687. DOI:10.2514/1.52963 |
| [11] |
王楷, 徐世杰, 黎康, 等. 双视线测量相对导航方法误差分析与编队设计[J]. 航空学报, 2018, 39(9): 152-166.
WANG Kai, XU Shijie, LI Kang, et al. Error analysis and formation design of double line-of-sight measuring relative navigation method[J]. Acta Aeronautica Astronautica Sinica, 2018, 39(9): 152-166. (in Chinese) |
| [12] |
韩飞, 刘付成, 王兆龙, 等. 空间多机器人协同的多视线仅测角相对导航[J]. 航空学报, 2021, 42(1): 316-326.
HAN Fei, LIU Fucheng, WANG Zhaolong, et al. Multiple line-of-sight angles-only relative navigation by multiple collaborative space robots[J]. Acta Aeronautica Astronautica Sinica, 2021, 42(1): 316-326. (in Chinese) |
| [13] | LEGRAND K A, DEMARS K J, PERNICKA H J. Bearings-only initial relative orbit determination[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(9): 1699-1713. DOI:10.2514/1.G001003 |
| [14] | GONG B, WANG S, LI S, et al. Review of space relative navigation based on angles-only measurements[J]. Astrodynamics, 2023, 7(2): 131-152. DOI:10.1007/s42064-022-0152-2 |
| [15] | SRINIVAS N, DEB K. Muiltiobjective optimization using nondominated sorting in genetic algorithms[J]. Evolutionary computation, 1994, 2(3): 221-248. DOI:10.1162/evco.1994.2.3.221 |
| [16] | VUKADINOVIC A, RADOSAVLJEVIC J, DORAEVIC A, et al. Multi-objective optimization of energy performance for a detached residential building with a sunspace using the NSGA-Ⅱ genetic algorithm[J]. Solar Energy, 2021, 224: 1426-1444. DOI:10.1016/j.solener.2021.06.082 |
| [17] |
宁晓琳, 梁晓钰, 孙晓函, 等. 地球卫星星光折射导航量测量及其性能对比[J]. 航空学报, 2020, 41(8): 90-103.
NING Xiaolin, LIANG Xiaoyu, SUN Xiaohan, et al. Satellite stellar refraction navigation measurements and their performance: a comparision[J]. Acta Aeronautica Astronautica Sinica, 2020, 41(8): 90-103. (in Chinese) |
2. Ministry of Information Technology Key Laboratory of Space Photoelectric Detection and Perception, Nanjing 211106, China
