



2. 国防科技大学 空天科学学院, 湖南 长沙 410073;
3. 国防科技大学 高超声速技术实验室, 湖南 长沙 410073;
4. 西北工业大学 无人系统技术研究院, 陕西 西安 710072
高超声速飞行器是指飞行速度大于5Ma的新型飞行器, 具有飞行速度快、突防能力强、作战空域广、反应时间短等特点[1-3]。目前, 高超声速飞行技术已经成功应用到各国巡航导弹、空天飞机、可重复使用运载器、无人机等各种类型飞行器的研制中[4]。尽管高超声速飞行器具有广阔的应用前景, 但其作为一种高度复杂的飞行器, 高超声速飞行器和发动机之间呈现出极强的耦合性特点, 这给飞行/推进系统控制带来了困难与挑战: 传统的飞行器和发动机设计是通过协调确定物理界面以及机械、电气和通信接口后独立进行的, 不考虑相互间的耦合作用, 使得飞机和发动机均难以发挥最大的性能潜力。
飞/发一体化控制(integrated flight-propulsion control, IFPC)技术是综合考虑和充分利用对飞行器和发动机的控制作用及其相互影响, 使飞行器可以最大限度地发挥其性能潜力, 以满足新任务能力的需求[5]。由于高超声速飞行器与发动机一体化的设计方式, 导致空气动力学、结构动力学与推进系统之间存在显著的交叉耦合效应, 这在客观上要求对高超声速飞行器和发动机进行一体化控制。采用飞/发一体化控制可以提高系统的整体性能, 实现飞行器和发动机的最优匹配, 极大地增强高超声速飞行器的作战能力[6]。
非线性动态逆(nonlinear dynamic inversion control, NDI)广泛应用于飞行器非线性控制中[7-8]。文献[9]针对舰载机人工着舰精确轨迹控制中飞行员操纵负担重、着舰环境复杂的问题, 采用NDI控制方法设计了舰载机着舰轨迹控制律。针对具有输入饱和的非仿射纯反馈非线性系统, 文献[10]基于奇异值摄动理论设计了NDI控制器, 该控制器不仅具有较好的跟踪性能与有效性, 还避免了反步法中的复杂性爆炸问题。文献[11]针对吸气式高超声速飞行器巡航状态下飞行环境复杂、建模时存在非线性以及参数摄动等问题, 提出了一种非线性动态逆-滑模控制律改进方法, 在NDI的基础上采用滑模变结构补偿参数摄动带来的误差。针对纵列式直升机存在的强耦合、强非线性、旋翼之间气动干扰大及非线性模型难以求解问题, 文献[12]设计了基于BP神经网络的动态逆控制器, 有效降低了系统超调量、减小系统响应时间。针对旋转导弹旋转带来的横向与纵向之间的交叉耦合效应, 文献[13]利用NDI方法进行解耦控制, 并加入了非线性干扰观测器, 保证了系统的鲁棒性。实际上, NDI控制方法高度依赖于所建模型的准确性, 在工程实践中难以达到最理想的控制效果, 而增量非线性动态逆(incremental nonlinear dynamic inversion control, INDI)控制方法在保证控制性能的基础上降低了对模型精确度的要求, 应用更加广泛[14]。
本文以X-43A高超声速飞行器为研究对象, 开展飞/发一体化控制方法与控制策略研究。根据飞/发耦合特性和耦合模型, 基于多输入-多输出(MIMO)设计理论和NDI、INDI控制方法, 分别设计了姿态外回路NDI控制器与角速率内回路INDI控制器, 以及高度和速度PID控制器, 并通过设计操纵交联的形式对发动机进行耦合补偿, 从而形成了飞/发一体化控制策略, 保证了高超声速飞行器的飞行品质和控制器的鲁棒性。
1 高超声速飞行器模型针对飞/发一体化的控制问题, 建立高超声速飞行器的六自由度非线性运动模型。
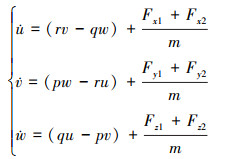
高超声速飞行器位置动力学方程为
|
(1) |
式中:u, v, w表示机体坐标系下的速度分量; p, q, r分别表示滚转角速度、俯仰角速度和偏航角速度; m表示高超声速飞行器质量; Fx1, Fy1, Fz1和Fx2, Fy2, Fz2分别表示高超声速飞行器所受气动力和发动机推力在机体坐标系下的分量。
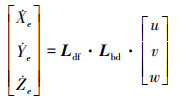
高超声速飞行器位置运动学方程为
|
(2) |
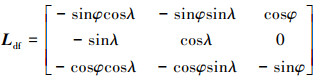
式中,Ldf和Lbd分别表示北东天坐标系至地心地固坐标系的转换矩阵,以及机体坐标系至东北天坐标系的转换矩阵

|
(3) |
|
(4) |
式中:λ与φ分别表示NED坐标系原点所处的地理经度和纬度; ϕ, θ, ψ分别表示高超声速飞行器的滚转角、俯仰角和偏航角。
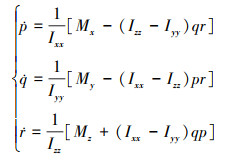
高超声速飞行器姿态动力学方程为
|
(5) |
式中:Ixx, Iyy, Izz表示转动惯量; Mx, My, Mz分别表示滚转力矩、俯仰力矩和偏航力矩。
高超声速飞行器姿态运动学方程为
|
(6) |
补充方程
|
(7) |
式中, α和β分别表示高超声速飞行器的迎角和侧滑角。
本文中舵面和发动机油门等执行机构回路由二阶模型表示
|
(8) |
式中:ξ=0.7;ωn=25 Hz。
2 基于非线性动态逆的控制器设计 2.1 NDI理论考虑非线性系统状态方程为
|
(9) |
则控制系统输出方程可表示为
|
(10) |
记

|
(11) |
式中:
显然, 构造的NDI控制律包含控制系统状态参量的反馈项f(x), 所以控制效果高度依赖被控对象数学模型的精确程度。
2.2 INDI理论为提高NDI控制的鲁棒性, 有关学者提出了INDI控制方法, 通过计算增量指令来代替总的控制输入, 降低控制律对于被控对象模型的依赖性[15]。
将(9)式中的系统状态量x在[x0, u0]的小邻域内泰勒展开, 可得
|
(12) |
定义

|
(13) |
|
(14) |
|
(15) |

|
(16) |
|
(17) |
那么(12)式可改写为

|
(18) |
式中:x0表示给定的初始状态量; u0表示给定的初始输入量; 
忽略高阶项, 则(18)式可线性近似表示为

|
(19) |
当控制律的解算频率足够高时, 状态量的增量Δx相对于控制输入的增量Δu是高阶小量, 因此A0Δx可以忽略, 则

|
(20) |
控制系统输出方程可写为

|
(21) |
为使系统的输出满足要求

|
(22) |
最后可得到增量INDI控制器的输出为
|
(23) |
观察(22)式可知, INDI控制律中不显含f(x), 被控对象模型的相关信息被可测量
本文根据奇异摄动理论, 采用姿态角速率内环与姿态外环分离的控制方案。其中, 姿态外环控制系统输入为姿态角误差, 输出控制量为姿态角速率期望值。由于姿态外环系统中无摄动较大的参数, 且控制系统易由状态方程准确表示, 不存在模型的不确定性, 为降低姿态外环控制律解算频率与复杂度, 姿态外环选用NDI控制。角速率内环控制系统存在气动系数等摄动较大的参数, 且精确模型建立较复杂, 为保证控制系统鲁棒性, 角速率内环选用INDI控制。同时, 通过升降舵偏角与发动机油门操纵交联的形式进行发动机对高超声速飞行器的耦合补偿。
为实现速度控制无静差以及高度控制的平滑稳定, 本文对于速度与高度回路分别选用PI控制与串级PID控制律。控制器的总体结构如图 1所示。

|
| 图 1 飞/发耦合控制结构 |
其中, K表示发动机对俯仰通道的操纵交联。为使俯仰舵偏角增量能够抵消发动机对俯仰通道的影响, 即满足

|
(24) |
式中,CmΔδe和Cmδt分别表示俯仰舵偏角增量和发动机油门对俯仰力矩的操纵系数。
操纵交联可表示为

|
(25) |
为进一步提高飞行品质和控制器的鲁棒性, 在姿态外/内回路控制器内引入参考模型、在线估计、误差控制器、指令转换、在线模型等模块。其中, 参考模型为姿态内回路提供平滑合理的指令参考值; 在线估计模块通过处理传感器测得数据, 估计所测飞行器状态量; 误差控制器通过设计合适的控制增益, 实现期望的误差动态响应特性; 指令转换模块将角加速度期望值转换为力矩期望值; 在线模型用于在线计算控制律中所需要的矩阵。以姿态外环操纵指令yCmdo、角速率内环操纵指令yCmdi、传感器反馈量z作为外环和内环控制器输入信号, uCmd作为控制器的输出信号。详细的姿态内、外回路控制器结构图如图 2和图 3所示。

|
| 图 2 姿态外环NDI控制器结构 |

|
| 图 3 角速率内环INDI控制器结构 |
下面对姿态控制器的子模块进行详细设计:
1) 参考模型
参考模型结构如图 4所示, 其中τ为时间常数。

|
| 图 4 参考模型 |
外环参考模型以姿态操纵输入指令yCmdo, 即滚转角ϕCmd、攻角αCmd和侧滑角βCmd为输入, 提供平滑参考指令和扩展状态
内环参考模型以角速率指令yCmdi, 即滚转角速度指令pCmd、俯仰角速度指令qCmd和偏航角速度指令rCmd为输入, 为姿态内回路提供平滑参考指令和扩展状态
2) 误差控制器
误差控制器根据参考指令yrefo, yrefi和状态反馈量
外环误差控制律可表示为
|
(26) |
内环误差控制律可写为
|
(27) |
其中, 控制增益可根据系统可控能力、时间尺度分离原则和执行机构/操纵机构动力学特性进行优化设计。
3) 指令转换
将角加速度作为角速率内环直接被控状态量时, 根据INDI控制原理, 需实时获取当前角加速度, 为避免直接测量角加速度时存在噪声及延迟的问题, 本文选择力矩作为角速率内环直接被控状态量, 因此需将角加速度期望值转换为力矩期望值。指令转换模块通过欧拉方程可得出力矩期望值Mdes

|
(28) |
式中, I表示机体转动惯量矩阵。
4) 在线模型
在计算外、内环控制量输出时, 根据模型与控制律的不同, 需要在线计算不同的矩阵。
对于姿态外环, 其控制系统状态方程为
|
(29) |
根据NDI控制原理, 姿态外环控制输出为

|
(30) |
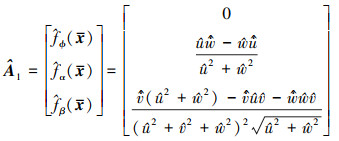
|
(31) |
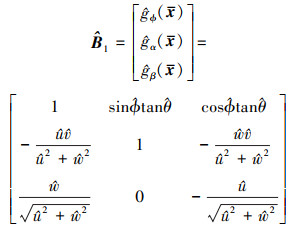
|
(32) |
根据速度估计值




对于角速率内环, 其控制系统状态方程为

|
(33) |
根据INDI控制原理, A2矩阵不需要建模及在线求解, 姿态外环控制输出为

|
(34) |
式中, u0为上一时刻的舵偏量, 由在线估计模块得出。
发动机推力与高超声速飞行器姿态之间已通过操纵交联实现了抵消解耦, 因此
|
(35) |
式中:



|
(36) |
分别在线计算

根据建立的具有耦合特性的飞/发一体化模型, 以及所设计的飞/发一体化控制策略, 对基于NDI、INDI的高超声速飞行控制器的有效性进行仿真飞行验证。仿真初始条件如如表 1所示。β, ϕ, q, p, r, δr, δa为0。
在本小节中, 假设高超声速飞行器以6Ma速度在25.5 km高度飞行, 高度回路设置斜方坡指令, 侧滑角指令为βc=0°, 滚转角指令为ϕc=0°, 仿真结果如图 5所示。其中, 黑色虚线为控制器指令(Cmd)曲线, 蓝色虚线为经典PID控制仿真曲线, 红色实线为INDI控制仿真曲线。

|
| 图 5 纵向通道仿真结果 |
由图 5可知, 在飞行高度方面, 当高超声速飞行器高度指令为稳定保持25.5 km平飞时, INDI控制的跟踪效果优于经典PID控制, 且INDI控制高度误差峰值较经典PID控制更小; 在飞行速度方面, INDI控制较经典PID控制速度误差峰值更小, 速度跟踪响应的稳态与快速性也更好; 在高超声速飞行器姿态方面, 迎角变化曲线与发动机油门量的变化曲线趋势接近, 表明纵向的动态响应过程引起了速度通道的扰动变化。此外, 在高超声速飞行器纵向运动过程中, 侧滑角、滚转角变化很轻微, 表明在高超声速飞行下, 飞行器的纵向运动没有引起明显的横航向扰动响应。
综上所述, INDI控制方法可较好地实现高超声速飞行器纵向通道间与发动机的耦合控制。纵向控制及解耦效果方面, INDI控制策略在解耦效果、快速性、稳态误差性能方面, 都优于经典PID控制, 且在同等性能条件下, INDI控制策略避免了复杂的增益调度设计过程。
3.2 横向通道仿真在本小节中, 假设高超声速飞行器以6Ma速度在25.5 km高度飞行, 侧滑角指令为βc=0°, 滚转回路设置为斜方坡指令, 仿真结果如图 6所示。

|
| 图 6 纵向通道仿真结果 |
图 6中黑色虚线为控制器指令(Cmd)曲线, 蓝色虚线为经典PID控制仿真曲线, 红色实线为INDI控制仿真曲线。由图 6可知, 在滚转角指令跟踪方面, INDI控制无明显超调量, 跟踪精度优于经典PID控制; 在飞行高度与速度方面, INDI控制的高度误差与速度误差均小于经典PID控制; 在高超声速飞行器姿态方面, 迎角变化趋势与油门杆增量变化趋势相同。为实现精确耦合控制, INDI控制的横航向用舵量比经典PID控制大。
综上所述, 相较于经典PID控制, INDI控制方法对高超声速飞行器横向强耦合作用控制性能更佳。
4 结论针对高超声速飞行器飞行过程中的飞/发间耦合效应对自身的影响, 本文在建立的高超声速飞行器飞/发一体化数学模型基础上, 基于奇异摄动理论, 将控制系统分解为角速率内回路和姿态外回路, 对外、内回路采用NDI、INDI方法分别进行控制回路设计; 然后, 为增强控制系统的鲁棒性, 在控制器中引入了在线估计、误差控制器、在线模型、参考模型等模块; 最后, 通过仿真验证了控制算法能有效实现飞/发耦合控制, 降低耦合效应对高超声速飞行器自身的影响, 且相比经典PID控制, 本文所设计的控制方法具有更快的响应速度与更高好的控制精度。
| [1] | DING Yibo, WANG Xiaogang, BAI Yuliang, et al. An improved continuous sliding mode controller for flexible air-breathing hypersonic vehicle[J]. International Journal of Robust and Nonlinear Control, 2020, 30(14): 5751-5772. DOI:10.1002/rnc.5114 |
| [2] | XU B, SHI Z K. An overview on flight dynamics and control approaches for hypersonic vehicles[J]. Science China Information Sciences, 2015, 58(7): 1-19. |
| [3] |
郭宗易, 周军, 郭建国. 高速飞行器新型自适应干扰估计姿态控制律[J]. 西北工业大学学报, 2017, 35(2): 177-182.
GUO Zongyi, ZHOU Jun, GUO Jianguo. On a new adaptive disturbance observer-based attitude control[J]. Journal of Northwestern Polytechnical University, 2017, 35(2): 177-182. (in Chinese) |
| [4] |
王冠, 尹童, 曹颖. 国外高超声速武器攻防发展态势研究[J]. 现代防御技术, 2022, 50(2): 26-32.
WANG Guan, YIN Tong, CAO Ying. Research on the development of foreign hypersonic offensive and defensive weapons[J]. Modern Defence Technology, 2022, 50(2): 26-32. (in Chinese) |
| [5] |
季春生. 飞发一体化控制先进技术发展分析[J]. 航空动力, 2019(4): 32-38.
JI Chunsheng. Analysis to the development of advanced technology for integrated flight-propulsion control[J]. Aerospace Power, 2019(4): 32-38. (in Chinese) |
| [6] |
李宏新, 谢业平. 从航空发动机视角看飞/发一体化问题[J]. 航空发动机, 2019, 45(6): 1-8.
LI Hongxin, XIE Yeping. Fundamental issues of aircraft/engine integration from the perspective of aeroengine[J]. Aeroengine, 2019, 45(6): 1-8. (in Chinese) |
| [7] | LI Y, LIU X, HE Q, et al. L1 adaptive structure-based nonlinear dynamic inversion control for aircraft with center of gravity variations[J]. Journal of Intelligent & Robotic Systems, 2022, 106(1): 1-16. |
| [8] | KEREAM S S, ABDALLA A N, FRAYYEH H F, et al. Three phase induction motor torque ripple minimization based on a novel nonlinear dynamic inverse controller[C]//Proceedings of the National Conference for Postgraduate Research, 2016: 321-329 |
| [9] |
罗飞, 张军红, 王博, 等. 基于非线性动态逆的舰载机直接升力航迹控制[J]. 飞行力学, 2021, 39(1): 40-45.
LUO Fei, ZHANG Junhong, WANG Bo, et al. Direct lift trajectory control for carrier aircraft based on NDI[J]. Flight Dynamics, 2021, 39(1): 40-45. (in Chinese) |
| [10] |
杨浩, 裴海龙. 一类输入饱和非仿射非线性系统的非线性动态逆控制[J]. 控制理论与应用, 2021, 38(4): 425-432.
YANG Hao, PEI Hailong. Nonlinear dynamic inversion approach for a class of nonaffine nonlinear systems with input saturation[J]. Control Theory & Applications, 2021, 38(4): 425-432. (in Chinese) |
| [11] |
李飞, 李新国. 基于动态逆-滑模的高速飞行器控制器设计[J]. 飞行力学, 2016, 34(2): 64-67.
LI Fei, LI Xinguo. Dynamic inversion-sliding mode for breathing hypersonic vehicle controller design[J]. Flight Dynamics, 2016, 34(2): 64-67. (in Chinese) |
| [12] |
张翾, 吴梅, 王宇航. 基于BP神经网络动态逆的纵列式直升机控制[J]. 飞行力学, 2021, 39(6): 36-41.
ZHANG Xuan, WU Mei, WANG Yuhang. Tandem helicopter control based on BP neural network dynamic inversion[J]. Flight Dynamics, 2021, 39(6): 36-41. (in Chinese) |
| [13] |
陈阳, 马建伟. 基于非线性干扰观测器的旋转导弹动态逆控制器设计[J]. 火力与指挥控制, 2018, 43(8): 156-159.
CHEN Yang, MA Janwei. Dynamic inversion control for spinning missilebased on nonlinear disturbance observer[J]. Fire Control & Command Control, 2018, 43(8): 156-159. (in Chinese) |
| [14] |
党小为, 唐鹏, 孙洪强, 等. 基于角加速度估计的非线性增量动态逆控制及试飞[J]. 航空学报, 2020, 41(4): 193-201.
DANG Xiaowei, TANG Peng, SUN Hongqiang, et al. Incremental nonlinear dynamic inversion control and flight test based on angular acceleration estimation[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 193-201. (in Chinese) |
| [15] | PAVEL M D, SHANTHAKUMARAN P, CHU Q, et al. Incremental nonlinear dynamic inversion for the apache AH-64 helicopter control[J]. Journal of the American Helicopter Society, 2020, 65(2): 1-16. |
| [16] |
刘安, 余宗金, 廖保全, 等. 四旋翼式飞行潜航器非线性增量动态逆控制[J]. 飞行力学, 2022, 40(2): 67-73.
LIU An, YU Zongjin, LIAO Baoquan, et al. Incremental nonlinear dynamic inversion control for aquad-rotor aerial underwater vehicle[J]. Flight Dynamics, 2022, 40(2): 67-73. (in Chinese) |
2. College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China;
3. Hypersonic Technology Laboratory, National University of Defense Technology, Changsha 410073, China;
4. Unmanned System Research Institute, Northwestern Polytechnical University, Xi'an 710072, China
