


2. 西安昆仑工业(集团)有限责任公司, 陕西 西安 710043
在某大型火炮伺服控制系统中,随动计算机通过驱动器带动电机运转,再通过减速器、齿轮等联动,带动火炮运动。由于火炮惯量较大、机械结构复杂,受到当前加工工艺和材料刚性的限制,电机轴架位与火炮齿圈架位间的误差不能完全消除。如果直接使用火炮齿圈架位作为电机的控制量,容易导致火炮运行过程中出现“抖振”现象。为了使系统的输出以大齿圈架位作为控制目标,实现指向更精确的位置控制,需要采取对应措施进行处理。
本文以某型高速转管火炮作为研究对象,应用经过改进的智能控制方法,设计了一套自适应的控制系统,并进行了状态响应分析和实物验证,结果表明新的闭环随动控制系统具有较好的稳定性和自适应能力。
1 伺服系统模型 1.1 系统结构本文研究的火炮伺服系统结构如图 1所示,运行时由随动计算机向驱动器发出控制指令,驱动双电机带动各自的减速器运动,减速器后固连的齿轮系统带动火炮运动,随动计算机通过安装在电机轴和齿圈的架位传感器进行周期采样,通过随动控制算法,控制火炮的运动转向。

|
| 图 1 火炮伺服系统结构 |
电机与减速器结构间以及各传动齿轮间由于加工材料和工艺、装配等原因,不可避免地存在齿隙,导致电机轴架位与载体实际架位间存在差异。如果单纯采用载体实际架位作为随动控制的输入变量,必然会造成反馈的齿圈架位不能如实反映电机轴输出的控制效果,导致随动控制过程的失效,出现载体剧烈抖动的现象。为了消除这一现象,国内的郭健和朱胜等[1-2]分别针对输入含齿隙非线性的系统设计了自适应控制器,对齿隙非线性采取了参数化处理,使用光滑非线性函数逼近齿隙非线性,两者本质上都属于对齿隙非线性不同程度近似。马艳玲等[3]提出了基于反步自适应控制的伺服系统齿隙补偿方法,通过选择Lyapunov函数,逐步递推,设计了基于状态反馈的自适应控制器。上述2种方法偏重于理论分析,实时性不强,没有针对系统参数调节方法的分析。滑模控制(sliding mode control,SMC)因具有算法相对简单、对系统参数变化不敏感等优点开始逐渐在机器人机械臂控制、水下无人驱动设备控制、船舶航迹控制等实际工程中得到应用[4-6]。传统滑模控制的问题是收敛速度无法保证,最终的误差只能趋近于平衡状态,在实际应用中无法完全克服抖振问题,因而文献[7]提出了终端(terminal)滑模控制思想,使用sat等非线性化函数构建滑模面,使误差在有限时间内收敛。然而该算法严重依赖滑模面参数的选择,不恰当的参数会导致系统运行过程中出现“奇异”现象,加重“抖振”。文献[8]提出了非奇异快速终端滑模控制,通过对滑模面进行非线性分析,保证在不同阶段的收敛速度。当控制系统到达滑模面时,会出现控制参数的高频切换,机械系统不可避免地出现抖振,如何能够快速地抑制抖振,成为了重要的研究方向。文献[9]将模糊控制与滑模控制相结合构建控制器,通过模糊特性实现开关增益的幅度调节,从而使系统的抖振得到削弱。综上所述,本文利用非奇异的快速终端滑模控制算法,设计了一种针对特定火炮的随动控制算法,采用经过改进的快速终端滑模控制算法,能够使跟踪误差快速收敛,同时削弱载体的抖振现象,提高了系统运行的精度和稳定度。
2 火炮伺服系统运动模型根据文献[10], 电机的电磁转矩平衡方程为

|
(1) |
式中:Kdn为电机的力矩系数;In为驱动电流;Jdn与bdn分别为电机的转动惯量和等效黏性摩擦因数; Jjn为减速机的转动惯量;θn为电机轴的转角;Mn为小齿轮和电机轴之间的弹性力矩;i为减速机的减速比。
根据小齿轮的受力分析可得,小齿轮的动力学方程为

|
(2) |
bcn为小齿轮的等效摩擦因数, Jcn为小齿轮的转动惯量, θcn为小齿轮的转角, Mcn为大小齿轮间的弹性力矩。
根据大小齿轮的啮合原理, 大齿轮和小齿轮之间的力矩平衡方程为

|
(3) |
式中:Jm为大齿轮加载体的转动惯量;bm为大齿轮的黏性摩擦因数;θm为大齿轮的转角;Ktn为大小齿轮之间的弹性系数;θm为大齿轮的转角;im为大小齿轮间的传动比。由于θn与θcn有
|
(4) |
联合(1)~(4)式可得

|
(5) |
(5) 式两边同乘以i2后,有

|
(6) |
令Jn=i2(Jdn+Jjn)+Jcn, bn=i2bdn+bcn, Kn=i2Kdn, 则(6)式可写为

|
(7) |
由于本系统为两套电机共同作用,由(3)式可得出双电机作用于负载的力矩平衡方程

|
(8) |
(7)~(8)式未考虑大小齿轮间存在齿隙的问题, 齿隙非线性是造成抖振的重要原因之一。因此现对齿隙进行建模。
设Tl为大小齿轮间的实际力矩, 大小齿轮间隙为α, 根据文献[11]有

|
(9) |
结合(9)式,将(7)~(8)式更新为

|
(10) |

|
(11) |
将(10)~(11)式变为
|
(12) |
从(11)~(12)式可以看出, 控制变量KnIn与电机轴架位相关, 与齿圈架位无直接关系, 由于要求实际控制变量以齿圈架位为基础, 因而将齿圈架位和电机轴架位做统一处理, 并假设齿圈架位与电机轴架位存在如(13)式所示的非线性关系
|
(13) |
代入(12)式可得
|
(14) |
式中, η为齿圈架位和电机轴架位的非线性关系参数, 由于实际系统中电机轴和大齿圈采用相同的旋转编码器采样架位数据, 本文中按照η=1进行后续计算。
由于实际系统采样周期为1 ms, 
|
(15) |
设θmt为期望齿圈架位值, 定义系统架位误差、速度误差和加速度误差分别为

|
(16) |
根据文献[12]构建非奇异快速终端滑模面
|
(17) |
式中: β>0;γ>0;p, q为正奇数, 且1<p/q<2;z>1。
设定滑模面为指数趋近率[13], 即

|
(18) |
为验证滑模面的稳定性, 构建Lyapunov函数
|
(19) |
可得

|
(20) |
根据Lyapunov稳定性理论[14], 可知滑模面最终趋向稳定。
3.2 控制率推导对(17)式求导可得

|
(21) |
结合上述(15)、(18)和(21)式可得出控制率的表达式为
|
(22) |
再联立(13)式可得最终控制率方程
|
(23) |
(23) 式中, 各参数均为确定参数, 便于将控制算法在实际转台中根据随动计算机操作系统的特性进行编程实现。
3.3 收敛速度推导由(17)式可得, 当s=0时, 误差变化率为

|
(24) |
说明控制系统向滑模面收敛时, 误差收敛速度取决于

为验证所设计的快速终端滑模控制器在大型转台随动控制系统中的实际效果, 根据图 1所示的火炮伺服系统结构, 对其进行建模, 可得图 2所示的Simulink仿真模型。通过Matlab Simulink混合编程实现了本文提出的算法, 并与原伺服系统的PID算法进行了对比仿真实验, 验证了算法的稳定性和精度。

|
| 图 2 火炮伺服系统Simulink模型 |
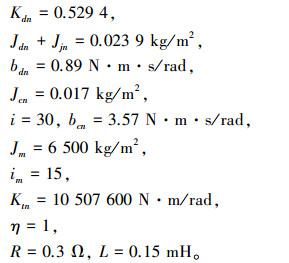
图 2中包含的主要参数及其取值为:
|
对本文提出的快速终端滑模控制参数进行反复调试, 得到各参数取值为

|
为进行性能比对,本文分别对原采用改进PID算法的仿真平台和采用新的快速终端滑模控制算法的平台进行了比较,所选的运动模式均为系统进行精度考核时的各种测试工况,方便进行新旧算法的比较。图 3a)~3b)所示为没有加入齿隙时原平台使用电机轴架位和改进平台使用齿圈架位,进行90°调转时的跟踪和误差图形。

|
| 图 3 未加入齿隙的比较 |
从图 3中可以看出,在没有加入齿隙时,2种算法都有较好表现,滑模控制算法稳定时间较长(比原算法长0.3 s),误差相对较大,但总体稳定。
图 4a)~4b)分别为加入5 mrad齿隙后原改进PID算法和本文算法间的图形比较。从图 4可以看出,出现齿隙后,原平台算法在进行调转运动后出现了较大的过冲现象,本文算法能够较好地抑制过冲,运动过程平稳。

|
| 图 4 加入3 mrad齿隙后的比较 |
图 5a)~5b)为60°/s正弦运动时,加入3 mrad齿隙时原算法和新算法间的图形比较。图 6a)~6b)分别为加入6 mrad齿隙后原改进PID算法和新算法间的图形比较。

|
| 图 5 正弦运动时加入齿隙后的比较 |

|
| 图 6 加入6 mrad齿隙后的比较 |
从图 5可以看出,当加入3 mrad齿隙时, 原平台算法在换向时误差急剧增大为原来的2倍(从5 mrad增大至10 mrad),新算法平台误差虽有一定变化,但整体在系统要求范围内。图 6a)~6b)分别为加入6 mrad齿隙后原改进PID算法和新算法间的图形比较。
从图 6中可以看出,当齿隙增大时,原平台已经出现严重的抖振现象,而新平台误差变化较为平缓,可以保证机械结构的稳定。
上述现象在实物平台中表现更为明显。经过实物平台验证,新的快速终端滑模控制算法能够在齿圈架位作为控制变量时稳定运转,所有指标满足系统要求。
5 结论大型火炮伺服系统中,需要使用齿圈架位作为最终控制变量,本文基于滑模控制的方法,设计了一套基于快速终端滑模控制的随动算法,得到以下结论:
1) 本文算法实现了齿圈架位控制火炮运动的目标,克服了原平台出现的“抖振”现象;
2) 使用了快速滑模终端方法,经过参数选择,保证了各项指标满足系统要求;
3) 本文算法由于引入滑模控制,在静态误差指标方面,稳定时间比原有算法稍长,但仍在系统指标范围内;
4) 本文算法适应性较强,经过系统调参后,可应用于不同转动惯量的大型转台系统。
未来该类型算法还将在转动惯量更大、响应速度更灵敏的转台中应用,如何与硬件平台更好的结合,进一步提升算法精度和稳定度,是今后的主要研究方向。
| [1] |
郭健, 吴益飞, 陈庆伟. 具有输入齿隙的一类非线性系统自适应控制[J]. 兵工学报, 2011, 32(10): 1298-1304.
GUO Jian, WU Yifei, CHEN Qingwei. Adaptive control of a nonlinear system with input backlash[J]. Acta Armamentarii, 2011, 32(10): 1298-1304. (in Chinese) |
| [2] |
朱胜, 孙明轩, 何熊熊. 输入具有齿隙非线性特性的周期系统的自适应控制[J]. 控制理论与应用, 2012, 29(4): 535-538.
ZHU Sheng, SUN Mingxuan, HE Xiongxiong. Adaptive control of a class of periodically time-varying nonlinear systems with input backlash[J]. Control Theory and Application, 2012, 29(4): 535-538. (in Chinese) |
| [3] |
马艳玲, 黄进, 张丹. 基于反步自适应控制的伺服系统齿隙补偿[J]. 控制理论与应用, 2008, 25(6): 1091-1094.
MA Yanling, HUANG Jin, ZHANG Dan. Backlash compensation in servo systems based on adaptive backstepping-control[J]. Control Theory & Applications, 2008, 25(6): 1091-1094. (in Chinese) |
| [4] |
李由. 卫星姿态控制的变结构滑模控制方法[J]. 西安交通大学学报, 2022, 56(7): 56-66.
LI You. Variable structure sliding mode control method for satellite attitude maneuver[J]. Journal of Xi'an Jiaotong University, 2022, 56(7): 56-66. (in Chinese) |
| [5] |
韩俊庆, 吴爱国, 董娜. 基于滑模干扰观测器的机械臂终端滑模控制[J]. 中南大学学报, 2020, 51(10): 2749-2757.
HAN Junqing, WU Aiguo, DONG Na. Terminal sliding mode control for robotic manipulator based on sliding mode disturbance observer[J]. Journal of Central South University, 2020, 51(10): 2749-2757. (in Chinese) |
| [6] |
赵德春, 宋延嵩. 基于扰动观测器的倾斜镜滑模控制[J]. 光子学报, 2022, 51(6): 1-11.
ZHAO Dechun, SONG Yansong. Sliding mode control of tip-tilt mirror based on disturbance observer[J]. Acta Photonica Sinica, 2022, 51(6): 1-11. (in Chinese) |
| [7] | ZHANG X, SUN L, ZHAO K, et al. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques[J]. IEEE Trans on Power Electron, 2013, 28(3): 1358-1365. |
| [8] | LIANGY W, XU SD, LIAW D C. A Study of T-S model based SMC scheme with application to robot control[J]. IEEE Trans on Industrial Electronics, 2008, 55(11): 3964-3971. |
| [9] |
肖宇强, 陈龙淼. 含齿隙伺服系统的反步自适应模糊滑模控制[J]. 电气与自动化, 2016, 45(6): 187-191.
XIAO Yuqiang, CHEN Longmiao. Adaptive fuzzy sliding mode control based on backstepping method for position servo system with backlash[J]. Machine Building & Automation, 2016, 45(6): 187-191. (in Chinese) |
| [10] |
杨文清. 双电机消隙伺服系统的研究与应用[D]. 西安: 西安电子科技大学, 2010 YANG Wenqing. Study and application of anti-backlash servo system by double-motor[D]. Xi'an: Xidian University, 2010 (in Chinese) |
| [11] |
李兵强, 陈晓雷, 林辉. 机电伺服系统齿隙补偿及终端滑模控制[J]. 电工技术学报, 2016, 31(9): 162-168.
LI Bingqiang, CHEN Xiaolei, LIN Hui. Terminal sliding mode control for mechatronic servo systems with backlash nonlinearity compensation[J]. Transactions of China Electrotechnical Society, 2016, 31(9): 162-168. (in Chinese) |
| [12] |
刘金琨. 滑模变结构控制MATLAB仿真[M]. 4版. 北京: 清华大学出版社, 2021.
LIU Jinkun. Sliding mode control and matlab simulation[M]. 4th Edition. Beijing: Thsinghua University Press, 2021. (in Chinese) |
| [13] |
康尔良, 贺建智, 王一琛. 永磁同步电机非奇异终端滑模控制器的设计[J]. 电机与控制学报, 2021, 25(12): 58-64.
KANG Erliang, HE Jianzhi, WANG Yichen. Design of non-singular fast terminal sliding mode controller for permanent magnet synchronous motors[J]. Electric Machines and Control, 2021, 25(12): 58-64. (in Chinese) |
| [14] | ORLOV Y. Discontinuous systems lyapunov analysis and robust synthesis under uncertainty conditions[M]. Berlin: Springer-Verlag, 2009. |
2. Xi'an KunLun Industry Group Co., Ltd, Xi'an 710043, China
