



2. 中国电子科技集团公司 电子科学研究院, 北京 100000;
3. 四川航天电子设备研究所, 四川 成都 610100
现代雷达面临的战场环境日趋复杂,一方面,各类隐身目标、集群目标层出不穷,给提高机载雷达的区域搜索效率以及探测精度带来了严峻的挑战。另一方面,电子压制与欺骗等干扰手段不断发展使得雷达探测技术在侦察与反侦察的博弈中面临巨大的困难。依靠传统的单站体制雷达进行区域搜索已经无法满足日益复杂的作战需求,而运用多雷达的协同探测技术,通过合理分配资源以及航迹优化,能够有效地提升区域的搜索效率[1]。
在机载组网雷达系统中,通过合理分配资源,调节雷达网各个节点的发射参数如功率、带宽、驻留时间等,能够有效提升机载组网雷达的目标检测与跟踪能力[2-3]。文献[4]提出了一种基于数据融合的网络雷达协同检测技术,通过多雷达协同作战和多源雷达数据融合,实现网络中雷达之间的资源共享和功能互补,有效提高雷达系统的整体战斗力。文献[5]在考虑优化雷达节点的数量和发射功率的情况下,开发了一种联合节点选择和功率分配(JSPA)策略,来提高多目标的最坏情况跟踪精度。与此同时,如何协同分配多节点的机动资源,规划各雷达运动航迹以获得更好的任务探测性能也成为现代研究的重点。在传统无人机航迹规划领域,有许多值得借鉴的工作成果。北京航空航天大学学者针对空中火力打击任务提出了一种航迹优化策略[6]。复旦大学学者针对监视任务,设计在最小化能量消耗的情况下最大化飞行伪装性能[7]。从总体上来讲,现有方案大多可描述为:在满足航迹既定的约束条件下,根据航迹优化策略规划出从起点至终点的最优或次优航迹[8]。然而这种点对点的航迹优化方法并不适用于机载组网雷达的区域搜索背景,难以有效提升雷达的区域搜索能力。
针对此问题,本文提出了一种面向区域搜索的机载组网雷达航迹规划方法,以期在给定的时间内完成对更大范围的侦察搜索。本文以最大化覆盖函数为目标,结合各节点运动约束,构建了航迹规划模型,并利用智能化方法对其进行求解。结果显示,所提出方法能在给定的时间内获得更高的搜索覆盖率。
1 雷达运动模型假设在目标区域中存在N架无人机执行搜索覆盖任务,每架无人机都搭载一部有源雷达。Xi, kR表示在第k时刻第i部机载雷达的状态, Xi, kR=[xi, kR, yi, kR, ϕi, kR]T, 其中, xi, kR和yi, kR表示在第k时刻第i部机载雷达的笛卡尔坐标值, ϕi, kR表示无人机飞行方向与x轴的夹角角度, 如图 1所示。

|
| 图 1 面向搜索任务的机载雷达运动模型 |
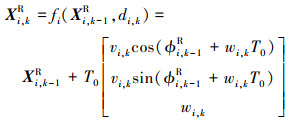
采用第i部雷达的线速度vi, k和角速度wi, k作为机动资源控制变量di, k, di, k=[vi, k, wi, k]T, 机载雷达的飞行是受无人机i最大平飞速度vi, max和最小平飞速度vi, min, 以及最小转角速度wi, min和最大转角速度wi, max所限制的, 即vi, min≤vi, k≤vi, max, wi, min≤wi, k≤wi, max。第k时刻第i部雷达的状态Xi, kR可通过(1)式得到
|
(1) |
式中: vi, kcos(ϕi, k-1R+wi, kT0)表示在x轴上的速度分量;vi, ksin(ϕi, k-1R+wi, kT0)表示在y轴上的速度分量;T0表示时间间隔。定义ξ=[X1, kR, …, XN, kR]T表示在k时刻网络内所有雷达的状态向量集合; dk=[d1, k, …, dN, k]为第k时刻所有节点的机动资源控制变量合集。根据(2)式可以得到ξkR的状态转换方程ξkR=f(ξkR, dk)+utkR(T0), 过程噪声utkR(T0)服从均值为零, 协方差为QtkR的高斯分布[9-10]。

|
(2) |
在机载组网雷达执行搜索任务的军事场景中, 可以将机载雷达协同区域搜索问题看作是一个多机载雷达的航迹规划问题。通过合理规划多部机载雷达的飞行路线, 在给定时间内最大化覆盖搜索区域, 从而提高战场态势感知能力和生存能力[11]。
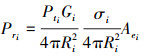
机载雷达通常在设定的目标区域协同执行搜索任务, 如图 2中所示的红色矩形区域。根据雷达方程, 可表征每个雷达节点的探测范围[12]
|
(3) |
式中:Ri表示机载雷达i的目标最大探测作用距离; Pri表示雷达i的接收功率; Pti表示雷达i的发射功率; σi表示雷达i目标的散射截面积; Aei表示雷达i的接收天线有效面积; Gi为雷达i的天线增益。假设机载雷达i的有效搜索范围为以自身为圆心, 以最大探测距离Ri为半径的圆, 如图 2中所示的蓝色圆形区域。

|
| 图 2 搜索任务场景模型 |
由图 2可知机载雷达集群协同执行区域搜索任务的过程中, 若各雷达采用随机/预先设置的飞行轨迹, 则可能会对某些子区域重复搜索, 造成雷达探测资源的浪费, 影响区域搜索覆盖率指标的实现。如果能通过有效的航迹优化, 合理地规划各节点飞行轨迹, 则有望大幅减少重复搜索区域的面积, 以提升组网雷达的搜索任务执行能力。
针对区域搜索任务, 本文考虑对目标区域进行栅格化处理, 以便对搜索性能进行量化, 从而简化计算, 如图 3所示。基于此, 本节建立了搜索性能评估函数Fk(dk), 表示将控制变量dk输入系统后, 在k时刻雷达网对区域的搜索覆盖能力。经过栅格化处理, 目标区域共有M个点, 二元变量pk, m(dk)表示组网雷达对目标区域内第m个点的搜索覆盖状态, m=1, 2, …, M。定义

|
(4) |

|
| 图 3 任务区域栅格化示意图 |
式中:Xi, kR(vi, k, wi, k)1/2表示在k时刻第i部雷达的笛卡尔坐标, 其受控制变量dk的影响;ck, m表示第m个点的笛卡尔坐标, ck, m=[xm, ym]T;Ri表示第i部雷达的探测威力范围。(4)式表示: 当任意一部雷达实现对点m的搜索覆盖时, pk, m(vi, k, wi, k)为1, 否则为0。在第k时刻, 组网雷达网目标区域的搜索覆盖能力不仅和每部雷达的飞行控制参数相关, 也受上一时刻的区域搜索覆盖情况影响。
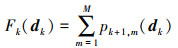
把任务区域内所有被标记为“1”的点的个数作为区域搜索的覆盖指标, 其中, 超出任务区域的雷达探测区域不算作组网雷达的探测范围。于是, Fk(dk)可以被写为
|
(5) |
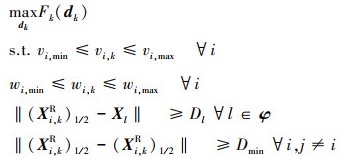
若能在每一帧优化时刻中, 最大化当前时刻的搜索性能评价函数Fk(dk), 便可提高机载雷达集群的区域搜索性能, 具体可以写为
|
(6) |
式中: Xl为第l个禁飞区的中心位置; Dl为第l个禁飞区的威胁半径; φ为禁飞区的索引集合。Dmin为机间最小距离。以最大化每一时刻的搜索覆盖率为目标函数建立了航迹优化模型, 其约束分别为机载平台的飞行性能约束、避撞约束以及避障约束。
3 求解算法由于(6)式包含非光滑的目标函数, 且该函数与雷达航迹优化参数呈高度非线性、非凸关系, 常规优化求解方法难以快速获取轨迹优化方案, 因此本文采用遗传算法(genetic algorithm, GA)来求解此问题。GA是一种通过模拟自然进化过程搜索最优解的方法[13]。其主要特点是直接对结构对象进行操作, 不存在求导和函数连续性的限定, 同时具有更好的全局寻优能力。初代种群产生之后, 按照适者生存和优胜劣汰的原理, 逐代演化产生出更好的近似解, 每一代根据种群中个体的适应度选择个体, 并借助自然遗传学的遗传算子进行组合交叉和变异, 产生出代表新的解集种群。这个过程将使得种群像自然进化一样产生更适应环境的后代, 末代种群中的最优个体经过解码, 可以作为问题近似最优解。
考虑到实际搜索任务需求中, 组网雷达往往只需要探测某地点一次即可认为完成对该位置的搜索, 本节引入了标记变量um=1, 2, …M记录每个栅格点的被搜索状态, 以此来减少重复搜索消耗的大量计算资源。
|
(7) |
(7) 式表示, 若k时刻m点被雷达搜索(pk, m=1), 则点m对应的标记变量um记为1。在每一次使用遗传算法求解的过程中, 需要对目标函数进行多次计算。通过引入标记向量um, 在计算F(k+1)(vi, k, wi, k)时只需要判定k+1时刻之前未被组网雷达搜索到的栅格点(um=0)。随着搜索任务不断推进, 计算目标函数所要判定的栅格点数逐渐减少, 目标函数的计算量也在不断减小, 由此大幅减少了优化过程中的计算量。
以上已经介绍了组网雷达进行区域搜索任务所建立的数学模型以及求解算法, 图 4给出本文提出的机载组网雷达区域搜索的算法流程图。

|
| 图 4 算法流程图 |
本节设计了仿真实验, 验证本文所提出的航迹优化方法, 在仿真一中设立无优化的参数对照组, 说明优化方案的有效性。在仿真二中加入禁飞区, 说明优化方案在复杂环境下的适用性, 并使用粒子群算法作为对比算法, 验证本文算法的优越性。
4.1 仿真一在仿真一中共设计3组实验, 其中1组使用本文提出的航迹优化方法, 另外2组为对照组, 涉及到的基本参数如表 1所示。假设雷达探测威力范围全部为圆形区域, 以目标区域的左下角为原点建立直角坐标系, 所有机载雷达的探测威力、最大、最小平飞速度等参数都是一致的。3组实验中都把任务区域划分为了多个10 km×10 km的栅格, 因此目标区域中共有1 600个栅格点。
| 参数名 | 实验号 | ||
| 1 | 2 | 3 | |
| 任务区域 | 400 km×400 km | ||
| 节点数量 | 4 | ||
| 搜索半径/km | 50 | ||
| 最大转角速度/(rad·s-1) | 0.05 | ||
| 最大平飞速度/(m·s-1) | 100 | ||
| 最小平飞速度/(m·s-1) | 20 | ||
| 优化时间间隔/s | 40 | ||
| 帧数 | 40 | ||
| 机动控制变量 | 随机 | 固定值 | 优化值 |
实验1使用随机的机动控制变量, 各机载雷达的初始状态分别为(0, 0, 0)、(500, 0, 1.07)、(500, 300, -3.14)、(0, 400, -0.8)。另外2个实验中机载雷达的数量和初始状态均与对照实验1相同。实验2使用固定的机动控制变量, 实验3使用本文提出的航迹优化方法得到各节点的机动控制变量。分别将3组实验的机动控制变量输入系统, 得到3次实验中无人机群的航迹以及各自雷达系统的搜索覆盖率。
图 5~7分别为3次实验得到的航迹结果, 结果显示: 采用随机控制变量得到的个别节点甚至会飞离目标区域, 达不到理想的搜索覆盖能力; 采用固定控制变量得到的集群航迹结果虽符合巡航飞行的场景, 但不同节点间的距离会过近或过远; 而采用本文提出面向区域搜索的航迹优化方法得到的各节点航迹结果相对分散, 彼此间有较合理的分工区域, 可初步判断该航迹优化方案能够使机载雷达集群获得最好的区域搜索能力, 图 8中的结果也验证了上述观点。

|
| 图 5 实验1的航迹结果 |

|
| 图 6 实验2的航迹结果 |

|
| 图 7 实验3的航迹结果 |

|
| 图 8 各组实验的搜索对比图 |
图 8中纵轴的搜索指标表示所有探测到的栅格点个数, 即Fk(dk)。由图 8可以看出,实验1的集群由于缺乏统一调度,最终的搜索覆盖率最低,且其增长速度最慢。对于实验2,得益于其控制变量值能使机载雷达集群向目标区域内巡航飞行,也有较高的搜索覆盖率。在相同的初始条件下,相较于对照实验1和实验2,实验3有着最高的搜索覆盖率,同时搜索覆盖率提升速度最快,这也验证了本文航迹优化方案的有效性。
4.2 仿真二仿真二中使用与仿真一相同的雷达基本参数。并在此基础上加入禁飞区,其仿真效果如图 9所示。在同等环境下适用粒子群算法进行求解,其覆盖率对比曲线如图 10所示。

|
| 图 9 加入禁飞区后的航迹结果 |

|
| 图 10 对比实验的搜索覆盖率对比图 |
图 9中绿色区域为禁飞区,图中4架无人机均能在避障的同时完成整个区域的搜索覆盖,且每架无人机航迹规划的分工区域合理,互不干扰,能够极大程度地提高搜索区域的覆盖率。图 10显示,在25帧以后,本文使用的遗传算法覆盖率要优于粒子群算法,验证了本文优化算法的优越性。
5 结论本文针对机载雷达执行区域搜索任务的背景,建立了面向搜索任务的航迹优化模型,并使用遗传算法对其进行了求解。仿真结果表明,本文提出的方法能够使机载组网雷达在规定时间获得更大的区域搜索覆盖率。
| [1] | GRECO M S, GINI F, STINCO P, et al. Cognitive radars: on the road to reality: progress thus far and possibilities for the future[J]. IEEE Signal Process, Magazine, 2018, 35(4): 112-125. DOI:10.1109/MSP.2018.2822847 |
| [2] | YAN Junkun, PU Wenqiang, ZHOU Shenghua, et al. Optimal resource allocation for asynchronous multiple targets tracking in heterogeneous radar networks[J]. IEEE Transactions on Signal Process, 2020, 68: 4055-4068. DOI:10.1109/TSP.2020.3007313 |
| [3] | YAN Junkun, PU Wenqiang, ZHOU Shenghua, et al. Collaborative detection and power allocation framework for target tracking in multiple radar system[J]. Information Fusion, 2020, 55: 173-183. DOI:10.1016/j.inffus.2019.08.010 |
| [4] | JIANG Wen, QI Zhangxi, YE Zhou, et al. Research on cooperative detection technology of networked radar based on data fusion[C]//2021 2nd China International SAR Symposium, 2021 |
| [5] | XIE Mingchi, YI Wei, KIRUBARAJAN T, et al. Joint node selection and power allocation strategy for multitarget tracking in decentralized radar networks[J]. IEEE Trans on Signal Processing, 2017, 66(3): 729-743. |
| [6] | DUAN Haibin, ZHAO Jianxia, DENG Yimin, et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Trans on Aerospace and Electronic Systems, 2021, 57(1): 706-720. DOI:10.1109/TAES.2020.3029624 |
| [7] | HU Shuyan, NI Wei, WANG Xin, et al. Joint optimization of trajectory, propulsion, and thrust powers for covert UAV-on-UAV video tracking and surveillance[J]. IEEE Trans on Information Forensics and Security, 2021, 16: 1959-1972. DOI:10.1109/TIFS.2020.3047758 |
| [8] | ZENG Yong, ZHANG Rui. Energy-efficient UAV communication with trajectory optimization[J]. IEEE Trans on Wireless Communication, 2017, 16(6): 3747-3760. DOI:10.1109/TWC.2017.2688328 |
| [9] | RISTIC B, ARULAMPALAM S, GORDON N. Beyond the Kalman filter: particle filters for tracking applications[M]. Boston, MA: Artech House, 2004. |
| [10] | BAR-SHALOM S, LI X R, KIRUBARAJANK T. Estimation with applications to tracking and navigation[M]. New York: John Wiley and Sons, 2001. |
| [11] |
王婷婷. 机载雷达性能评估与协同探测方法研究[D]. 西安: 西安电子科技大学, 2017 WANG Tingting. Research on performance evaluation and cooperative detection method of airborne radar[D]. Xi'an: Xidian University, 2017 (in Chinese) |
| [12] |
陈伯孝. 现代雷达系统分析与设计[M]. 西安: 西安电子科技大学出版社, 2012.
CHEN Boxiao. Analysis and design of modern radar system[M]. Xi'an: Xidian University Press, 2012. (in Chinese) |
2. China Electronics Technology Group Corporation Academic of Electronics and Information Technology, Beijing 100000, China;
3. Sichuan Institute of Aerospace Electronic Equipment, Chengdu 610100, China
