



2. 航空工业金城南京机电液压工程研究中心, 江苏 南京 211106
飞机电液舵机作为重要的飞控子系统, 广泛用于驱动飞机的关键舵面。受高温高压、油液污染、装配不当等因素影响, 此类系统的作动筒活塞密封件容易发生磨损、老化, 导致内泄漏故障频繁发生。内泄漏故障一般较难被检测到, 但发展到一定程度将显著影响作动系统性能, 主要表现为力输出能力降低, 舵面位置跟踪精度下降。因此, 设计容错控制器以确保内泄漏故障发生后舵机系统以可接受的性能继续工作对于提高飞控系统可靠性, 保证飞机飞行安全具有重要的现实意义。
自适应控制理论被广泛用于电液舵机系统容错控制器设计。文献[1-2]分别将内泄漏故障建模为乘性和加性故障, 设计自适应律估计故障幅值, 利用基于故障估计的控制器重配置来调节故障影响。文献[3]提出一种非线性随机参数估计方法估计内泄漏系数, 结合故障估计结果设计自适应反步容错控制器进行故障补偿。然而, 这些容错控制器设计均依赖精确的数学模型, 并未考虑泄漏特性建模误差的影响。部分未建模泄漏特性与内泄漏故障位于同一控制通道, 将显著影响故障的估计结果, 从而影响容错控制效果。除泄漏特性外, 活塞与作动筒之间复杂的摩擦力特性、作用在活塞杆上的外负载力等也难以精确建模, 可见电液舵机系统存在多种未建模动态。
为改善多种未建模动态影响下的控制系统性能, 基于反步法的非线性鲁棒控制方法被广泛用于电液舵机系统常规控制器设计。文献[4]假设未建模动态有界且上界已知, 利用非线性鲁棒控制律来调节未建模动态影响; 文献[5]根据自适应得到的未建模动态的上界信息设计鲁棒控制律来抑制其影响; 文献[6]将未建模动态划分为常值及时变两部分, 常值部分通过自适应方式估计并补偿, 时变部分通过鲁棒控制律抑制。然而, 上述方法均需通过设置高反馈增益以获得满意的控制性能, 但高增益控制也进一步放大了噪声效应, 容易激励出高频动态。
基于未建模动态估计与补偿的控制策略可以有效减轻未建模动态对控制系统性能的影响, 同时也避免了高控制增益。这类方法的主要思想是将未建模动态作为扰动项估计, 基于估计结果进行前馈补偿。文献[7]设计了一种活塞杆速度信号驱动的扩展扰动观测器估计非匹配未建模动态; 文献[8]通过引入辅助状态变量代替活塞杆速度及负载压力的微分信号设计扰动观测器, 从而在一定程度上减轻了测量噪声对扰动估计结果的影响。文献[9]设计了有限时间扰动观测器估计匹配及非匹配未建模动态, 但观测器设计要求存在未建模动态的二阶导数; 文献[10]设计RBF神经网络逼近未建模动态, 采用自适应方式更新神经网络权值, 但该方法的计算开销相对较大。
基于以上分析, 本文考虑作动筒泄漏特性、摩擦力特性及外负载扰动等未建模动态, 提出一种基于多种未建模动态估计与补偿的内泄漏故障自适应容错控制方法。首先, 受文献[11]启发, 将被控对象模型划分为2个子系统, 分别设计扩展状态观测器(extended state observer, ESO)估计子系统中的匹配及非匹配未建模动态。然后, 结合未建模动态估计结果, 设计自适应反步容错控制器。采用基于故障参数自适应的控制器重配置机制调节内泄漏故障, 采用前馈方式抑制未建模动态影响。最后, 通过严重内泄漏条件下的半物理仿真试验对所提方法的有效性进行验证。
1 电液舵机模型电液舵机结构如图 1所示, 该舵机主要包括双喷嘴挡板伺服阀和作动筒(对称液压缸)组件。作动筒输出端通过操纵支座来连接舵面负载, FL(N)为作用在活塞杆上的外部负载力, qh(m3/s)为作动筒内泄漏流量。飞控计算机计算出的控制输入指令u(V), 再通过驱动装置转换为电流或电压信号控制阀的开度。由液压源供给的油液流经伺服阀、作动筒驱动活塞运动, 系统输出为活塞杆位移xh(mm)。可见, 电液舵机系统实际为一类位置伺服系统。

|
| 图 1 电液舵机结构示意图 |
作动筒活塞杆力平衡方程为

|
(1) |
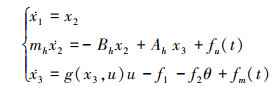
式中: mh(kg)为活塞及活塞杆总质量; Ah(m2)为活塞有效作用面积; Bh(N·s/m)为黏性阻尼系数; pL=p1-p2(MPa)为负载压力, 其中p1和p2分别为液压缸左右两腔压力; fu(t)为非匹配未建模动态, 主要包括未建模的摩擦力动态及外部负载力FL。
对称液压缸的负载压力动态特性可以描述为

|
(2) |
式中: βe(MPa)为油液体积弹性模量; Vt(m3)为液压缸总体积; 

|
(3) |
式中:Ci(m3/s/Pa)为正常内泄漏系数;Ct(m3/s/Pa1/2)为故障内泄漏系数; β(t-tf)为描述内泄漏故障的时间函数, 将其定义为

|
(4) |
式中: tf为故障发生时间, μf为故障演变速率。
考虑伺服阀固有频率远大于液压固有频率的情况, 忽略阀的动态特性, 将伺服阀模型简化为比例环节, 即有xv=kvu, 其中kv(m/V)为伺服阀增益系数, xv(mm)为阀芯位移, u为控制输入。假设回油压力pr为零, 可推得负载流量计算公式为
|
(5) |
式中: kq(m2/s/Pa1/2)为流量增益; ps(MPa)为供油压力; sign(·)为自定义符号函数且有

|
(6) |
根据(1)~(6)式, 定义系统状态变量x=[x1, 
|
(7) |

|
(8) |
式中: 

假设1 内泄漏故障参数θ满足θmin≤θ≤θmax且θmax, θmin为已知正常数。
假设2 未建模动态fu, fm有界可导且其导数h1(t), h2(t)的上界分别为
假设3 系统位置参考指令x1d三阶连续可导且有界。
注1实际中液压缸左右两腔压力p1, p2均有界且负载压力pL远小于供油压力ps, 据此可推得g(x3, u)>0。
针对电液舵机系统(7)~(8)式, 设计基于未建模动态估计与补偿的自适应容错控制器以抑制多种未建模动态影响, 实现对内泄漏故障的有效调节, 确保故障前后系统稳定且具有高精度的位置跟踪性能。
2 容错控制器设计 2.1 故障参数自适应律设计设计内泄漏故障参数自适应律形式如下

|
(9) |
式中: 

|
(10) |
(9) 式中不连续投影映射的使用可确保故障参数更新过程具备以下性质:
性质1 
性质2 
将电液舵机模型(7)式前2个方程作为子系统1, 设计ESO估计非匹配未建模动态fu。
针对子系统1, 定义扩展子系统状态变量xe1= 
|
(11) |
式中: h1(t)表示非匹配未建模动态随时间的变化率。
针对(11)式, 设计ESO为

|
(12) |
式中: 
令状态估计误差


|
(13) |
式中: 

|
(14) |
将电液舵机模型(7)式第3个方程作为子系统2, 设计ESO估计匹配未建模动态fm。因定义的扩展状态变量不同, 将子系统2描述为以下2种扩展形式。
形式1 定义扩展子系统状态变量xe2=[x3, xe2]T 
|
(15) |
式中: 
形式2 定义扩展子系统状态变量xe2=[x3, xe2]T 
|
(16) |
针对(15)、(16)式2种形式的扩展子系统状态方程, 设计ESO为

|
(17) |
令状态估计误差

|
(18) |

|
(19) |
式中: 

|
(20) |
注2 (18)式及(19)式所示2种误差动态特性有助于对不同未建模动态影响下的系统进行稳定性分析, 具体见2.3节。
2.3 自适应容错控制律设计及主要结论本节通过综合故障参数及未建模动态估计结果, 利用反步法设计自适应容错控制器, 具体设计过程为:
步骤1 定义系统位置跟踪误差为
|
(21) |
使用虚拟控制律α1镇定状态x2, 定义辅助误差变量为

|
(22) |
式中: 
对mhz2求导并联立(7)式得到

|
(23) |
使用虚拟控制律α2镇定状态x3, 定义辅助误差变量为
|
(24) |
联立(23)式及(24)式, 设计虚拟控制律α2为
|
(25) |
式中: α2a为模型补偿项, α2s为鲁棒控制项, k2>0为反馈控制增益。
联立(23)~(25)式得到

|
(26) |
步骤2 考虑(24)式及(7)式, 对z3求导得到

|
(27) |
式中,

|
(28) |
式中: 

设计控制律为

|
(29) |
式中,k3>0为反馈控制增益。
将(29)式代入(27)式中得到

|
(30) |
定理1 针对发生内泄漏故障的电液舵机系统(7)~(8)式, 考虑匹配及非匹配未建模动态且未建模动态为慢时变(h1(t)=h2(t)=0), 在满足假设1~3的情况下, 设计自适应容错控制律(29)式、观测器(12)式及(17)式、投影映射型故障参数自适应律(9)式及更新函数

|
(31) |
当且仅当通过选择合适的控制增益k1, k2, k3, 观测器带宽ωe1, ωe2, 正实数ω1, ω2, μ1, μ2, 使得以下矩阵Λ为正定阵

|
(32) |
式中

|
则可确保闭环系统所有信号有界, 位置跟踪误差、故障参数及未建模动态估计误差渐近收敛于零。
证明 考虑扩展状态变量定义

|
(33) |
定义Lyapunov函数为

|
(34) |
已知h1(t)=h2(t)=0, 对V求导并联立(22)、(26)、(33)、(13)、(18)式得到

|
(35) |
根据(31)式及不连续投影映射性质2可进一步推得(35)式满足

|
(36) |
定义增广误差为Z

|
(37) |
由Λ正定可知λmin(Λ)>0, 根据(37)式有W>0, W∈L2, V∈L∞, 误差向量z, ε, η及故障参数估计误差



证毕。
定理2 针对发生内泄漏故障的电液舵机系统(7)式、(8)式, 考虑时变的匹配及非匹配未建模动态(h1(t)≠0, h2(t)≠0)影响, 在满足假设1~3的情况下, 所设计的自适应容错控制律(29)式可确保闭环系统所有信号有界, 以下Lyapunov函数有界

|
(38) |
且其上界满足

|
(39) |
式中
|
证明 考虑扩展状态变量定义


|
(40) |
定义Lyapunov函数如(38)式所示, 对V求导并联立(22)、(26)、(40)、(13)、(19)式得到

|
(41) |
根据杨氏不等式, 可将(41)式改写为

|
(42) |
由于Λ正定, 根据(42)式可进一步推出

|
(43) |
根据比较引理, 可由上式推出(39)式所示结果, 因此可知误差变量Z有界, 从而进一步推出闭环系统所有信号有界, 证明过程同定理1。
证毕。
注3 根据(39)式可知, 通过调整控制器及观测器参数可使得闭环系统具有规定的暂态及稳态性能。具体而言, 在确保矩阵Λ正定的情况下, 调整控制增益k1, k2, k3使得λmin(Λ)增大、λ增大, 可达到提高系统暂态响应速度, 减小稳态跟踪误差的目的。另外, 增大观测器带宽ωe1, ωe2可减小ξ, 从而提高系统的稳态位置跟踪精度。
3 试验验证依托飞机作动系统半物理仿真平台对所提方法进行试验验证。该仿真平台由以下几部分组成:
1) 上位机: 提供控制器模型的离线仿真、编译及下载功能; 提供图形化的用户界面, 帮助用户实现对实时仿真机硬件I/O的配置; 提供实时仿真过程中系统运行状况监控、参数调节、数据记录等功能。
2) 实时仿真机: 运行控制器模型, 发出控制指令, 获取外部传感器及其他信号, 实现信号采集和信号模拟。
3) I/O板卡: 包含模拟量采集卡、差动变压器式位移传感器(linear variable displacement transducer, LVDT)解调卡及电机控制卡, 实现仿真模型与外界硬件设备之间的交互。
4) 信号调理模块: 用于实现实时仿真机与飞机舵机实物之间的电气信号匹配。
5) 电源激励模块: 为LVDT提供交流电压源。
6) 飞机舵机实物: 电备份式液压作动器一台(见图 2), 支持电液伺服作动及电静液作动2种工作模式, 本试验使用电液伺服作动工作模式。在液压缸两腔之间串联2个Parker 9F600S管式单向节流阀(顺时针旋转4圈为全开, 额定流量为40 L/min), 通过手动调节阀的开度, 模拟不同程度内泄漏故障。舵机的作动筒活塞杆通过摇臂并联一个加载缸, 加载缸两腔间接有节流阻尼阀。当活塞杆运动时, 通过摇臂带动加载缸运动, 加载缸两腔油液形成节流阻尼效应模拟作动筒密封损坏引起的黏性阻尼增大。

|
| 注:1-对称液压缸, 2-伺服阀, 3-LVDT位移传感器, 4-压力传感器, 5-管式单向节流阀, 6-摇臂 图 2 飞机舵机实物 |
试验中, 系统供油压力设置为15 MPa, 位置指令信号设置为x1d=15sin(0.6πt) mm, 试验时长600 s, 控制系统采样时间为0.1 ms, 控制输入限幅为-4~4 V。传感器采集的系统状态数据由监控软件访问并将其保存为Matlab数据文件。
为方便定量评价系统控制性能, 将系统时域响应划分为正常稳态、故障暂态及故障后稳态3个阶段, 将位置跟踪误差绝对值的最大值Me、均值μe、方差σe作为系统稳态位置跟踪性能指标, 将Me作为故障暂态位置跟踪性能指标, 指标的具体计算公式见文献[11]。
除本文方法外, 选取PI方法、非线性自适应容错控制方法(nonlinear adaptive fault-tolerant control, NAFTC)进行对比试验。其中, NAFTC方法与本文方法均采用反步法设计容错控制器, 采用基于故障参数自适应更新的控制器重配置调节故障, 但NAFTC方法采用鲁棒控制律抑制未建模动态影响。3种控制方法的参数设置如表 1所示。
| 控制方法 | 参数 |
| PI | kP=12, kI=0.3 |
| NAFTC | k1=104, k2=k3=103, ω1=ω2=1×10-6, μ1=1×109, μ2=1×103, Γ=1×10-14 |
| 本文方法 | ωe1=50, ωe2=25(其余参数同NAFTC) |
200 s左右手动调节2个管式节流阀使其开度均为1圈, 模拟严重内泄漏故障。该故障条件下, 本文方法下的伺服阀最大负载流量为18.55 L/min, 液压缸最大内泄漏流量为10.53 L/min, 约占最大负载流量的56.77%。
3种方法的位置跟踪误差曲线如图 3所示, 对应的位置跟踪性能指标计算结果见表 2。试验中, 考虑到PI控制的比例增益kp对系统位置跟踪性能影响显著, 故将其设置为一个较大的值。根据图 3可知, PI方法正常及故障后的位置跟踪精度均不如本文方法, 但优于NAFTC方法。对比NAFTC方法故障暂态及故障后稳态的位置跟踪性能指标发现, 随着基于故障参数更新的自适应补偿机制逐渐发挥作用, 该方法故障后稳态的最大位置跟踪误差略有减小。本文方法故障前后的最大位置跟踪误差始终控制在位置给定的±1.5%以内, 可见本文方法具有良好的故障调节能力, 可实现高精度的位置跟踪控制。对比本文方法及NAFTC方法的位置跟踪性能指标可知, 通过对未建模动态进行估计和补偿可显著改善容错控制系统性能。

|
| 图 3 3种方法位置跟踪误差曲线及其局部放大 |
| 控制方法 | 正常稳态t∈[100 s, 150 s) | 故障暂态t∈[200 s, 215 s) | 故障后稳态t∈[300 s, 600 s) | ||||||
| Me | μe | σe | Me | Me | μe | σe | |||
| PI | 0.149 9 | 0.052 0 | 0.028 3 | 0.304 6 | 0.318 9 | 0.112 9 | 0.067 1 | ||
| NAFTC | 1.449 0 | 0.509 2 | 0.378 9 | 1.982 6 | 1.599 5 | 0.494 5 | 0.449 4 | ||
| 本文方法 | 0.131 3 | 0.022 6 | 0.018 6 | 0.200 7 | 0.198 6 | 0.035 4 | 0.032 5 | ||
3种方法的控制输入对比如图 4所示, 可知该试验条件下, PI方法故障后稳态的控制输入已接近最大限幅。根据图 4b)可进一步看出, 设置高比例增益改善PI方法位置跟踪性能的同时, 也对控制系统的稳定性产生了不利影响, 控制输入抖振加剧。相比之下, 本文方法的控制输入曲线较为平滑, 但最大控制输入也超过了3.5 V, 说明此时伺服阀开口已接近全开, 该故障程度接近本文方法可以调节的故障程度上限。

|
| 图 4 3种方法控制输入曲线及其局部放大 |
3种方法滤波后的活塞杆运动速度、负载压力曲线如图 5~6所示。其中, 故障后稳态, 本文方法控制下的系统最大负载压力约为5.6 MPa, 最大活塞杆速度约为36.86 mm/s。

|
| 图 5 3种方法活塞杆速度曲线局部放大 |

|
| 图 6 3种方法负载压力曲线局部放大 |
本文方法的内泄漏故障参数估计结果见图 7。正常条件下, 最大内泄漏流量约为1.46 L/min, 内泄漏故障参数估计值稳定在1.11×10-8 (m3/s)/Pa1/2左右。故障后稳态, 内泄漏故障参数估计值最后收敛于7.27×10-8 (m3/s)/Pa1/2左右, 对应最大内泄漏流量约为10.53 L/min。

|
| 图 7 内泄漏故障参数估计结果 |
本文方法的未建模动态估计结果见图 8。由于匹配未建模动态与内泄漏故障位于同一控制通道, 受故障暂态内泄漏故障参数估计误差影响, 匹配未建模动态的估计值也出现跳变, 之后随着故障参数估计结果的收敛也实现了快速收敛。非匹配未建模动态与内泄漏故障不在同一通道内, 因此其估计结果受故障影响很小。

|
| 图 8 未建模动态估计结果 |
本文针对电液舵机作动筒内泄漏故障, 考虑作动筒摩擦力、外部负载力及作动筒泄漏特性等未建模动态的影响, 提出一种基于多种未建模动态估计与补偿的自适应容错控制方法, 并对该方法的稳定性进行了严格的证明。通过对所提方法进行严重内泄漏故障下的半物理仿真试验, 得出以下结论:
1) 相比PI方法、NAFTC方法, 本文方法通过对多种未建模动态进行估计和前馈补偿有效抑制了未建模动态对容错控制系统性能的影响, 通过采用基于故障参数自适应更新的控制器重配置机制, 实现了对内泄漏故障的有效调节, 系统正常及故障条件下均获得了相对更好的位置跟踪性能。
2) 当系统供油压力为15 MPa, 作动筒内泄漏流量达到10.53 L/min, 超过负载流量的56.77%时, 该故障程度已经接近本文方法可以调节的故障上限, 伺服阀开口接近最大, 但本文方法仍可保证系统稳定且具有良好的位置跟踪性能, 最大跟踪误差控制在给定的±1.5%以内, 满足工程使用要求。
| [1] | YAO Jianyong, YANG Guichao, MA Dawei. Internal leakage fault detection and tolerant control of single-rod hydraulic actuators[J]. Mathematical Problems in Engineering, 2014, 2014: 1-14. |
| [2] | PHAN V D, CONG P V, DAO H V, et al. Robust fault-tolerant control of an electro-hydraulic actuator with a novel nonlinear unknown input observer[J]. IEEE Access, 2021, 9: 30750-30760. DOI:10.1109/ACCESS.2021.3059947 |
| [3] | MAHULKAR V, ADAMS D E, DERRISO M. Adaptive fault tolerant control for hydraulic actuators[C]//Proceedings of the 2015 American Control Conference, 2015: 2242-2247 |
| [4] | SHEN Wei, LIU Xinyu, SU Xiaoyu. High-precision position tracking control of electro-hydraulic servo systems based on an improved structure and desired compensation[J]. International Journal of Control, Automation and Systems, 2021, 19(11): 3622-3630. DOI:10.1007/s12555-020-0705-1 |
| [5] |
董振乐, 杨英浩, 姚建勇, 等. 匹配和不匹配干扰共存时电液伺服系统预设性能渐近跟踪控制[J]. 中国机械工程, 2022, 33(20): 2437-2443.
DONG Zhenle, YANG Yinghao, YAO Jianyong, et al. Asymptotic prescribed performance tracking control of electro-hydraulic servo system under matched and unmatched disturbance[J]. China Mechanical Engineering, 2022, 33(20): 2437-2443. (in Chinese) |
| [6] | LYU Litong, CHEN Zheng, YAO Bin. Advanced valves and pump coordinated hydraulic control design to simultaneously achieve high accuracy and high efficiency[J]. IEEE Trans on Control Systems Technology, 2020, 29(1): 236-248. |
| [7] | GUO Kai, WEI Jianhua, FANG Jinhui, et al. Position tracking control of electro-hydraulic single-rod actuator based on an extended disturbance observer[J]. Mechatronics, 2015, 27: 47-56. DOI:10.1016/j.mechatronics.2015.02.003 |
| [8] | WON D H, KIM W H, SHIN D H, et al. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems[J]. IEEE Trans on Control Systems Technology, 2015, 23(2): 787-795. DOI:10.1109/TCST.2014.2325895 |
| [9] |
赵纯, 于存贵, 何庆, 等. 电液伺服型并联式加注机器人运动轨迹跟踪控制[J]. 宇航学报, 2019, 40(5): 585-595.
ZHAO Chun, YU Cungui, HE Qing, et al. Motion trajectory tracking control of an electro-hydraulic servo parallel filling robot[J]. Journal of Astronautics, 2019, 40(5): 585-595. (in Chinese) |
| [10] | GUO Qing, CHEN Zhenlei. Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty[J]. Mechanical Systems and Signal Processing, 2021, 46: 106869-106885. |
| [11] | XU Zhangbao, LIU Qingyun, YAO Jianyong. Adaptive prescribed performance control for hydraulic system with disturbance compensation[J]. International Journal of Adaptive Control and Signal Processing, 2021, 35(8): 1544-1561. DOI:10.1002/acs.3262 |
| [12] | DENG Wenxiang, YAO Jianyong. Extended-state-observer-based adaptive control of electro-hydraulic servo mechanisms without velocity measurement[J]. IEEE/ASME Trans on Mechatronics, 2019, 25(3): 1151-1161. |
2. AVIC Jincheng Nanjing Engineering Institute of Aircraft System, Nanjing 211106, China
