


随着科技的发展,无人机在军事以及民用领域的应用前景愈发壮大,而无人机的安全回收则完全依赖于刹车系统的性能[1]。传统液压刹车系统需要复杂的液压管路,不仅影响无人机结构设计,还存在液压油泄露的风险,可靠性低。全电刹车系统使用机电作动器(electromechanical actuator, EMA)取代液压作动机构,具有体积小、质量轻、可靠性高等优势,是未来无人机刹车系统的发展方向[2]。
无人机刹车系统性能在实际过程中会受到跑道表面状况、空气阻力、刹车盘磨损等诸多因素的干扰,因此其制动性能不仅依赖于作动机构,更受到控制策略的影响。随着理论发展和技术进步,滑移率式控制被广泛应用于刹车控制中,其核心思想是调节飞机滑移率使机轮与地面间的结合系数保持最大值以获得最大摩擦力矩。现有文献已将多种控制理论应用于飞机滑移率跟踪控制。文献[3]采用了参数模糊自整定PID方法,可以根据滑移率偏差自动调整PID参数。然而相关的参数自整定规则主要依据实际经验,难以适应复杂多变的跑道状况。文献[4]提出了一种针对防滑刹车系统的自抗扰控制算法,通过对系统总扰动的估计与补偿实现对滑移率的精确跟踪,但该控制器的参数整定比较复杂。文献[5]利用自适应径向基函数神经网络对刹车系统内的非线性干扰进行了估计。然而,该方法依赖于离线状态数据集,通常难以获得精确的扰动数据进行预先训练。文献[6]采用反步动态面控制和非对称障碍李雅普诺夫函数相结合的方法,保证了飞机刹车系统的侧向稳定性。文献[7]分析了滑移率和结合系数等参数之间的非线性关系,将准无限时域模型预测控制方法应用于全电刹车系统的控制中,相比于传统控制方法取得了更好的刹车效果。然而,该方法需要对刹车系统状态变量在未来时域内的行为进行在线预测,然后求解性能指标函数,因此控制器的在线计算负担较重。滑模控制因其快速收敛性、实现简单、对外部干扰的强鲁棒性等优点而被广泛应用于工业控制领域[8-9]。滑模控制通过调整控制器的结构,将系统状态轨迹限制在预先设计的滑模面上,迫使系统按照预定轨迹滑动至平衡点。文献[10]提出了一种基于滑模控制的滑移率跟踪策略,具有较强适应性,可应用于多种跑道工况,降低了模型参数不匹配对刹车性能的影响。文献[11]针对滑移率跟踪设计了基于指数趋近律的滑模控制器,实现了系统的渐进收敛。然而,目前应用于刹车系统的滑模控制均为常规形式,仍存在由开关切换项引起的抖振问题,导致刹车过程中滑移率波动较大,机轮打滑次数增加,引起系统刹车效率降低、刹车距离增加,甚至出现机轮深度打滑至抱死状态。除此之外,已有的大多数控制策略依赖于地面结合系数拟合公式,实际中难以获得,并存在由机轮与跑道状况变化引起的拟合误差。
针对无人机刹车系统特点以及现有文献的不足,本文提出了一种级联快速终端滑模控制方法。首先建立了合理简化的飞机刹车动力学模型,避免了对地面结合系数拟合公式的依赖。其次,利用反演控制的思想,将全电刹车系统分解为滑移率子系统和EMA子系统,分别设计了带有全阶滑模面的快速终端滑模控制器实现滑移率和刹车压力参考值跟踪。Lyapunov稳定性分析表明该方法可以在有限时间内控制滑移率收敛到参考值。最后通过仿真测试证明本文所提出的控制器具有良好的刹车性能。
1 全电刹车模型 1.1 无人机刹车动力学模型无人机防滑刹车过程中机体受力分析如图 1所示。

|
| 图 1 无人机防滑刹车过程中机体受力分析 |
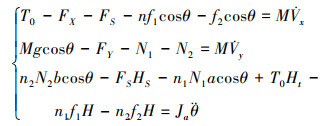
机体纵向运动方程、垂直方向力平衡方程、力矩平衡方程分别为
|
(1) |
式中: g为重力加速度; M为飞机着陆质量; Vx为飞机纵向滑跑速度; Vy为飞机垂直方向速度; θ为飞机俯仰角; Ja为飞机机体转动惯量; FY为升力; N1和N2分别为主轮载荷与前轮载荷; f1和f2分别为主机轮和前机轮与地面间的摩擦力; n1为受刹主机轮个数; n2为前轮个数; T0为发动机推力; FX为空气阻力; FS为阻力伞阻力; Ht为发动机推力线距飞机水平轴下移距离; HS为阻力伞悬挂点距飞机水平轴上移距离; H为飞机重心距地面高度; a为主机轮中心到飞机重心的水平距离; b为前轮中心到飞机重心的水平距离。
受刹机轮的动力学方程为

|
(2) |
式中: R为主轮半径; Tb为刹车力矩; Bω为轮轴摩擦系数; ω为主轮角速度; Jω为机轮转动惯量。
忽略刹车盘的温度变化及磨损等因素对刹车力矩的影响, 刹车力矩表示为

|
(3) |
式中, Kb为力矩转换系数pA为刹车压力。
刹车过程中, 由于刹车力矩Tb的作用, 使得(Vx-Rω)>0, 滑移率λ表示机轮相对跑道的滑动比率, 定义为

|
(4) |
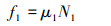
飞机刹车过程主要依赖主机轮与地面间的摩擦力f1, 定义地面结合系数为μ1, 摩擦力f1表示为
|
(5) |
结合系数受诸多因素影响, 目前无法精确建模, 通常认为结合系数μ1取决于滑移率λ, 机轮-跑道摩擦系数曲线趋势如图 2所示。在无人机刹车过程中, 在稳定区域内, 随着滑移率λ的增大, 地面结合系数也先逐步增大, 主机轮与地面间的摩擦力f1也随之增大, 直到λ=λ*时可得到最大结合系数μmax及最大摩擦力。若继续增大滑移率, 此时地面摩擦力将显著减小, 机轮将趋于抱死状态。当滑移率超过容限值λP时, 无人机进入不稳定区域, 侧向稳定性将迅速降低, 易发生侧滑或甩尾事故。滑移率控制的目标是实现λ对λ*的跟踪以获取最大地面摩擦力。对(4)式求导可得滑移率与机体速度之间的关系为

|
| 图 2 机轮-跑道摩擦模型 |
为了摆脱防滑刹车控制系统对轮胎-跑道摩擦模型的依赖, 设计适应不同跑道条件的制动控制策略, 首先对飞机刹车动力学模型进行合理简化, 考虑

|
(7) |
式中:
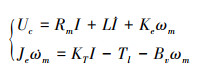
EMA由无刷直流电机、减速齿轮以及滚珠丝杠组成。无刷直流电机输出力矩经过减速齿轮放大后, 经滚珠丝杠将旋转运动转换为轴向运动, 进而压紧刹车盘, 产生刹车力矩。无刷直流电机模型表示为
|
(8) |
式中: Uc为电枢电压; Rm为定子电阻; I为电枢电流; L为定子电感; Je为转动惯量; ωm为电机角速度; Tl为负载转矩; Bv为黏滞阻尼系数; KT为转矩常数; Ke为反电动势常数。
假设刹车盘在刹车过程中仅存在弹性形变, EMA输出的刹车压力pA为

|
(9) |
式中: cb为刹车盘刚度系数; xE为滚珠丝杠位移。
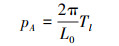
滚珠丝杠的负载力矩方程及运动方程为
|
(10) |

|
(11) |
式中, L0为滚珠丝杠导程。
对(9)式求导有

|
(12) |
本文主要针对滑移率跟踪控制, 以无人机滑移率为输出变量, 电枢电流为控制变量。综合(7)~(12)式, 可得无人机全电刹车系统整体动态模型为
|
(13) |
定义误差变量z1=λ-λ*, 滑模面设计为

|
(14) |
式中, c1, α1为控制器参数。
当滑移率子系统的理想滑动模态建立后, 满足s1=0, 当控制器参数满足以下条件时, 误差变量z1将在有限时间内收敛到零[12]

|
(15) |
快速终端滑模控制形式为
|
(16) |
式中, Peq*为等效控制项, Psw*为切换控制项。
等效控制可以使系统的状态轨迹到达滑模面后被约束在滑模面上。令(14)式中的滑模面为零, 将(7)式代入(14)式, 可推导出等效控制律为

|
(17) |
当系统状态轨迹在滑模面以外时, 开关控制项迫使系统向滑模面运动。开关控制项设计为

|
(18) |
式中控制系数kd1, kT1和ηl1都是正实数。
开关控制项确保了系统的抗干扰性, 但其控制的不连续性也导致了抖振问题。为抑制系统抖振现象, 对开关项施加低通滤波器, 设计为

|
(19) |
式中, T1为低通滤波器的带宽。
因此, 滑移率子系统的切换控制项Psw*表示为

|
(20) |
由(13)式可知, 刹车压力与电枢电流关系为
|
(21) |
式中:

定义误差变量z2=pA-pA*, 滑模面设计为

|
(22) |
式中, c21, c22, α21, α22为控制器参数。
当EMA子系统的理想滑动模态建立后, 满足s2=0。当控制器参数满足以下条件时, 误差变量z2将在有限时间内收敛到零[12]
|
(23) |
针对EMA子系统的快速终端滑模控制形式为

|
(24) |
式中, I*为电机电枢电流参考值, Ieq*为等效控制项, Isw*为切换控制项。
令(22)式中的滑模面为零, 将(21)式代入(22)式, 可推导出等效控制为

|
(25) |
针对EMA子系统的开关控制项设计为

|
(26) |
式中,控制系数kd2, kT2和ηl2都是正实数。
对开关项输出施加低通滤波器如下

|
(27) |
式中,T2为低通滤波器的带宽。
因此, 系统切换控制项Isw*可根据(26)式和(27)式计算得出

|
(28) |
无人机全电刹车系统级联快速终端滑模控制框图如图 3所示。

|
| 图 3 级联快速终端滑模控制结构框图 |
全电刹车系统的稳定性对无人机安全起飞与降落至关重要。在发生较大扰动时, 飞机滑移率应快速收敛至给定滑移率附近, 避免进入不稳定区域。
对于EMA子系统, 将(21)~(24)式代入可得

|
(29) |
然后将(25)式代入(29)式中, 滑模面表示为

|
(30) |
根据(27)式, 对(30)式求导可得

|
(31) |
选取Lyapunov函数为
|
(32) |
对(32)式求导可得

|
(33) |
根据Lyapunov稳定性理论, 如果

|
(34) |
根据(33)式可以进一步推导得到

|
(35) |
因此, 系统的状态轨迹可以在有限时间Tf2内达到滑模面。通过推导得到Tf2为

|
(36) |
式中,s2(t0)为滑模面s2的初始值。
因此, 当EMA的状态轨迹到达滑模面(22)后, 如果滑模面设计参数满足(23)式, 刹车压力与其参考值之间的跟踪误差z2也将在有限时间收敛到零。同理, 无人机全电刹车系统滑移率也可以在有限时间收敛到参考值。因此, 所提出的级联快速终端滑模控制策略可以保证控制系统的有限时间收敛特性。
3 仿真分析为了验证所提出的级联快速终端滑模控制策略的有效性, 在Matlab/Simulink中搭建了无人机机体仿真模型和控制器。采用文献[13]中的机轮-跑道拟合模型, 分别在干跑道、湿跑道以及冰跑道工况下进行仿真测试, 3种跑道工况对应的最大结合系数μmax分别为0.8, 0.4, 0.2, 为获得较高地面结合系数, 参考滑移率设置为λ*=0.12。飞机防滑刹车系统参数如表 1所示, 飞机着陆速度设置为72 m/s。当接收到刹车信号后, 刹车力会急剧增加, 飞机速度会逐渐降低。当飞机的速度降低到5 m/s时, 认为刹车过程结束。
| 参数 | 数值 |
| 重力加速度g/(m·s-2) | 9.8 |
| 飞机质量M/kg | 5 000 |
| 纵向速度Vx/(m·s-1) | 72 |
| 重心高度H/m | 2.178 |
| 飞机机体转动惯量Jω/(kg·m2) | 0.95 |
| 主机轮半径R/m | 0.3 |
| 轮轴摩擦系数Bω/(N·m·rad-1) | 1.2 |
| 力矩转换因数Kb | 3.7×10-4 |
| 转矩常数KT/(N·m·A-1) | 0.4 |
| 电机反电动势常数Ke/(V·rad·A-1) | 0.6 |
| 滚珠丝杠导程L0/m | 8×10-3 |
| 电机定子电阻Rm/Ω | 1 |
| 电机定子电感L/H | 1.2×10-3 |
| EMA转动惯量Je/(kg·m2) | 1.24×10-4 |
| 电机黏性阻尼系数Bv/(N·m·rad-1) | 0.004 |
| 刹车盘刚度系数cb/(N·m-1) | 5×106 |
滑移率子系统控制器参数选取为c1=5, α1=0.5, kd1+kT1+ηl1=10, T1=0.01:EMA子系统控制器参数选取为c21=5, c22=8, α21=0.25, α22=0.4, kd2+kT2+ηl2=5, T1=0.002。
图 4为干沥青跑道工况下飞机防滑刹车系统仿真结果。由图 4可知, 飞机和机轮减速平稳, 没有出现较大的波动或机轮深度打滑现象时, 飞机滑移率在经过一定振荡后收敛至给定值, 飞机的刹车距离为486.7 m, 刹车时间为11.788 s。飞机防滑功能可以被清楚地观测到, 在12 s刹车时间内, 共进行了24次防滑动作。

|
| 图 4 干沥青跑道仿真结果图 |
图 5为湿跑道工况下飞机防滑刹车系统仿真结果, 本文所提出的控制器仍可快速准确地跟踪参考滑移率。但由于地面结合系数的降低, 刹车距离和时间有所增加, 刹车距离为918.7 m, 刹车时间为22.762 s, 但未出现机轮抱死的情况。

|
| 图 5 湿跑道仿真结果图 |
为了进一步验证所提控制方法的跟踪性能,进行冰跑道下的刹车测试,仿真结果如图 6所示。刹车时间增加到43.3 s,刹车距离增加到1 666 m。需要注意的是,冰跑道更容易导致机轮抱死。虽然冰跑道工况下刹车时间和距离更长,但所提出的控制器仍可控制飞机滑移率准确跟踪参考值,避免了机轮抱死的情况,提高了刹车稳定性。3种工况下飞机防滑刹车性能参数如表 2所示。

|
| 图 6 冰跑道仿真结果图 |
| 跑道类型 | 平均刹车力/kN | 最大刹车力/kN | 刹车距离/m | 刹车时间/s |
| 干跑道 | 4.37 | 13.15 | 486.7 | 11.788 |
| 湿跑道 | 2.218 | 9.861 | 918.7 | 22.762 |
| 冰跑道 | 1.134 | 8.539 | 1 666 | 43.278 |
针对无人机全电刹车系统的强非线性以及多耦合性, 本文设计了结合反演思想的级联快速终端滑模控制方法。首先, 针对地面结合系数难以精确建模的问题, 对飞机刹车动力学模型进行了合理简化, 在控制器设计过程中避免了地面结合系数拟合公式的使用。其次, 针对飞机滑移率以及EMA子系统, 分别设计了快速终端滑模控制器, 并利用低通滤波器抑制了抖振现象。仿真结果表明, 本文提出的控制器可以提高刹车系统的稳定性, 在多种跑道工况下, 均能保证滑移率在有限时间内收敛到参考值, 可以有效降低机轮打滑次数, 缩短刹车距离。
| [1] |
谢彦, 苏静, 王红玲, 等. 飞机全电刹车系统的发展与关键技术研究[J]. 航空工程进展, 2019, 10(06): 846-853.
XIE Yan, SU Jing, WANG Hongling, et al. Development and key technology research of aircraft all-electric braking system[J]. Advance in Aeronautical Seience and Engineering, 2019, 10(6): 846-853. (in Chinese) |
| [2] |
李繁飙, 黄培铭, 阳春华, 等. 基于非线性干扰观测器的飞机全电刹车系统滑模控制设计[J]. 自动化学报, 2021, 47(11): 2557-2569.
LI Fanbiao, HUANG Peiming, YANG Chunhua, et al. Sliding mode control design of aircraft electric brake system based on nonlinear disturbance observer[J]. Acta Automatica Sinica, 2021, 47(11): 2557-2569. (in Chinese) |
| [3] |
蔡文举, 林辉. 参数模糊自整定PID在飞机全电刹车中的应用[J]. 电光与控制, 2008(2): 39-42.
CAI Wenju, LIN Hui. Application of parameter fuzzy self-tuning PID in aircraft all-electric braking[J]. Electronics Optics & Control, 2008(2): 39-42. (in Chinese) |
| [4] | JIA J, JIAO Z, SUN D, et al. Aircraft anti-skid braking active disturbance rejection control based on optimal slip ratio[C]//CSAA/IET International Conference on Aircraft Utility Systems, 2018: 1-6 |
| [5] | LIANG Bo. Adaptive nonsingular fast terminal sliding mode control for braking systems with electro-mechanical actuators based on radial basis function[J]. Energies, 2017, 10: 1637. DOI:10.3390/en10101637 |
| [6] |
李兵强, 陈晓雷, 林辉, 等. 飞机全电防滑刹车系统稳定动态面控制[J]. 系统工程与电子技术, 2016, 38(5): 1139-1145.
LI Bingqiang, CHEN Xiaolei, LIN Hui, et al. Enhanced stability dynamic surface control for aircraft antiskid braking system using electromechanical actuator[J]. Systems Engineering and Electronics, 2016, 38(5): 1139-1145. (in Chinese) |
| [7] |
王鹏, 李玉忍, 梁波, 等. 基于非线性模型预测控制的飞机全电刹车控制[J]. 西北工业大学学报, 2015, 33(6): 989-993.
WANG Peng, LI Yuren, LIANG Bo, et al. Aircraft all-electric braking control based on nonlinear model predictive control[J]. Journal of Northwestern Polytechnical University, 2015, 33(6): 989-993. (in Chinese) DOI:10.3969/j.issn.1000-2758.2015.06.022 |
| [8] |
李玉忍, 张智慧, 徐健龙. 飞机防滑刹车模糊滑模变结构控制研究[J]. 西北工业大学学报, 2015, 33(1): 45-49.
LI Yuren, ZHANG Zhihui, XU Jianlong. Research on fuzzy sliding mode variable structure control of aircraft antiskid braking[J]. Journal of Northwestern Polytechnical University, 2015, 33(1): 45-49. (in Chinese) |
| [9] |
付龙飞, 田广来, 李玉忍, 等. 反馈线性化飞机防滑刹车滑模变结构控制律研究[J]. 西北工业大学学报, 2013, 31(6): 962-966.
FU Longfei, TIAN Guanglai, LI Yuren, et al. Research on sliding mode variable structure control law of feedback linearized aircraft antiskid braking[J]. Journal of Northwestern Polytechnical University, 2013, 31(6): 962-966. (in Chinese) |
| [10] | JI X, LIN H, ZHOU S. Slip ratio control for aircraft electric braking system based on sliding mode control[C]//2019 22nd International Conference on Electrical Machines and Systems, 2019: 1-5 |
| [11] | FU L F. Slid mode VSC for aircraft anti-skid braking system with index reaching law[J]. Applied Mechanics & Materials, 2013: 973-977. |
| [12] | FENG Y, HAN F, YU X. Chattering free full-order sliding-mode control[J]. Automatica, 2014, 50: 1310-1314. |
| [13] | YI J, ALVAREZ L, HOROWITZ R. Adaptive emergency braking control with underestimation of friction coefficient[J]. IEEE Trans on Control Systems Technology, 2002, 10(3): 381-392. |
