


无人机系统是目前无人系统领域发展较快、水平较高、实际应用较多的一类空中无人系统, 具有成本低、无人员伤亡、操作方便和灵活可靠等特点。与固定翼飞机相比, 四旋翼飞机具有许多优点, 例如, 具备垂直起飞、着陆、悬停,以及室内飞行的能力。随着应用环境的日趋复杂以及任务的日益多样, 单机的能力受到了限制, 多机的编队协同已经成为无人机应用的重要发展趋势。
然而, 四旋翼无人机具有6个自由度, 却只有4个控制输入, 因此, 其动力学不仅是非线性的, 而且是耦合的、欠驱动的, 很难被控制。此外, 无人机在编队飞行的过程中, 会受到阵风、湍流和其他的外界干扰, 且考虑到四旋翼离散动力学的特征值位于单位圆的边界上, 因此, 需要一种先进的控制策略来实现自主编队飞行的稳定, 使编队具有较高的可操作性和对外界干扰的鲁棒性。为此, 人们做了很多努力, 并制定了一些策略来解决这类系统在编队飞行过程中遇到的问题。
近年来, 已经提出了几种策略来应对以上提出的一些问题。Guzey等[1]开发了一种基于非线性输出反馈神经网络的一致性控制器。Yan等[2]提出了基于一致性的双闭环滑模编队控制器。魏扬等[3]考虑闭环系统存在时变干扰的情况下, 设计了用于无人机编队保持的自适应控制器。Zhen等[4]解决了干扰和不确定性存在时, 编队飞行中无人机的速度和姿态协同控制问题。Ille等[5]设计了分布式MPC用于跟踪给定的参考轨迹, 并用惩罚因子来避免编队内碰撞的发生。Chevet等[6]提出基于MPC的编队重构算法, 不仅允许损坏的无人机离开编队, 还允许恢复的无人机重新加入当前编队, 同时避免碰撞。Cai等[7]研究了一种用于多无人机编队控制的事件触发MPC方案, 可以减少分布式MPC方案的计算负担。Huang等[8]提出了一种基于卡尔曼滤波和MPC的协同避碰方法, 指导多架无人机协同避碰决策。Wolfe等[9]设计和测试了用于编队飞行跟踪的分布式多模型MPC控制器。Rosa等[10]在非线性MPC的框架下, 设计了一种具有避障功能的编队飞行控制器。
MPC是解决约束问题最有效的控制方法之一, 它还可以通过多变量耦合实现多目标最优控制[11]。但是, 无人机的离散时间模型是临界稳定的, 在MPC的滚动优化过程中, 这种临界稳定性可能会进一步恶化, 这是被许多研究所忽略的。本文针对编队中无人机的TS和RS分别设计多约束预测模型控制器, 以实现多约束和干扰存在的情况下, 编队的最优控制和对于规划路径较好的跟踪; 此外, 通过对预测控制的成本函数进行适当地修改, 不仅可以改善MPC计算中的数值问题, 而且可以确保最优计算过程中闭环系统的稳定性。
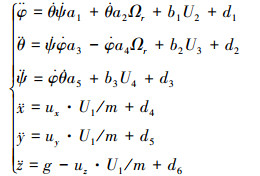
1 四旋翼动力学模型及编队算法 1.1 考虑干扰的四旋翼动力学模型本文考虑的四旋翼结构是完全相同的。其动力学模型可以通过拉格朗日-欧拉的方法获得。这里, 考虑干扰因素的四旋翼非线性数学模型为[12]
|
(1) |
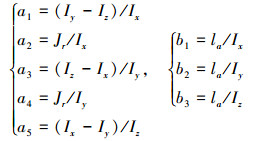
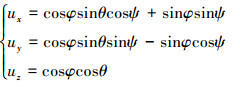
式中:(φ, θ, ψ)为四旋翼的3个姿态的欧拉角, 分别代表滚转角、俯仰角和偏航角; (x, y, z)为四旋翼的质心在惯性坐标系中的位置坐标; m为四旋翼无人机的总质量; g是重力加速度; Ui(i=1, 2, 3, 4)为对应的控制输入; Ωr为螺旋桨角速度残差; di(i=1, 2, …, 6)表示外部扰动的集合, 且|di|≤Di, Di(i=1, 2, …, 6)为有界正实数。aj(j=1, 2, 3, 4, 5), bk(k=1, 2, 3), ux, uy和uz的表达式如(2)~(3)所示
|
(2) |
|
(3) |
Jr为四旋翼的每个旋翼末端到飞行器重心的距离; (Ix, Iy, Iz)分别为围绕每个轴的转动惯量;la为转子的悬臂长度。
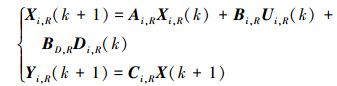
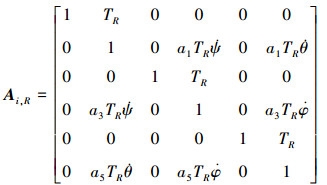
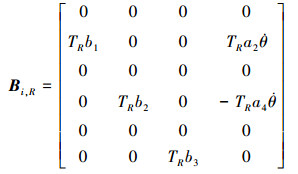
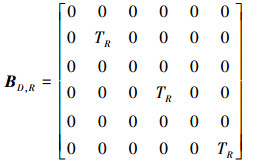
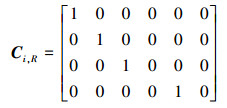
1.2 模型的离散化由(1)式可以看出, 前3个方程描述了四旋翼的旋转动力学, 后面3个方程表示平移动力学, 因此可以将(1)式分成RS和TS。对于第i个无人机的RS, 在同时考虑干扰和不确定性的情况下, 线性时变离散状态空间模型为
|
(4) |
式中, Xi, R(k)=[φ(k), 


|
(5) |
|
(6) |
|
(7) |
|
(8) |
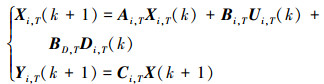
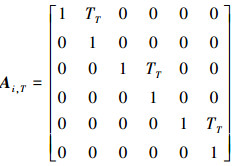
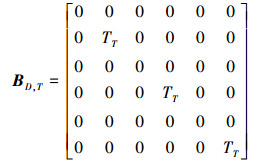
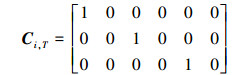
同理, 对于第i个无人机的TS, 其离散线性化时变模型为
|
(9) |
式中, Xi, T(k)=[x(k), 


|
(10) |

|
(11) |
|
(12) |
|
(13) |
考虑n个相同的UAV的编队, 每个UAV由Vi(i∈{1, 2, …, n})表示。它们构成有向图G={V, E}, 其中V={V1, V2, …, Vn}是UAV节点的集合, E⊆V×V为图的边集, 其中图的边集由eij表示。表示Vi和Vj之间可以相互获得彼此的位置和速度信息。aij表示节点Vi和Vj之间连接的权重, aij=1表示节点Vi可以收到节点Vj的信息, 否则aij=0。Vi的邻点集合由Ni={Vj∈V: eij∈E}表示。
以TS的x轴方向为例

|
(14) |
式中, 在只考虑定拓扑结构的系统时, (14)式的一致性控制律为[12]
|
(15) |
式中, pij为第i个无人机和第j个无人机之间的距离。k1>0。同理可以得到另外2个轴向的一致性控制律。
2 多约束MPC的设计本文设计的主要目标是实现无人机编队的稳定和航迹跟踪, 而多无人机编队是一个多约束的复杂系统, 因此, 可以采用MPC的方法进行求解。在本节中, 分别针对每个UAV的TS和RS设计对应的MPC, 以保证UAV的稳定性和路径跟踪能力。如上一节所述, TS通过ux, uy和uz决定了四旋翼的参考方向。因此, 首先对TS进行MPC的设计。
对于编队中第i个UAV, 以TS为例, 考虑干扰情况下的差分模型为
|
(16) |
定义ΔXi, T(k)=Xi, T(k)-Xi, T(k-1), ΔUi, T(k)=Ui, T(k)-Ui, T(k-1), 从而, 可以得出一个新的增广系统为
|
(17) |
式中:


|
(18) |
其中, 矩阵Fi, ζ和Hi, ζ分别为

|
(19) |
约束模型预测控制的本质是通过求解最优控制轨迹ΔUi, T来最小化给定时间k的成本函数Ji, T(k)。当然, 这种最小化是基于Ji, T(k)受到一系列线性不等式约束下的实时优化, 通常, 这些约束可以表示为文献[13]中的形式。假如在k时刻, 取新的状态向量矩阵为Xi, T(k+i|k)=[ΔXi, T(k+i|k); Y(k+i|k)-(Ci, Trs(k+1|k))], 其中, rs(k|k)=[xr(k|k); 


|
(20) |
式中:

|
(21) |
式中:Rs, T(k|k)=[(Ci, Trs(k+1|k)), (Ci, Trs(k+2|k)), …, (Ci, Trs(k+Np|k))]为期望的输出矩阵,Yi, T(k)=Fi, TXi, T(k|k)+Hi, TΔUi, T(k)。Qi, T和Ri, T是由矩阵Qi, T和Ri, T组成的对角块阵。这里假设期望轨迹是缓慢变化的, 即Δrs(k)=rs(k+i+1|k)-rs(k+i|k)≈0, (i=1, …, Np), 将Yi, T(k)代入(21)式中可以得到
|
(22) |
在考虑ΔUi, T和λi, T的情况下, 求解最优控制和拉格朗日乘子为:
|
(23) |
|
(24) |
在得到最优解后, 只有控制序列ΔUi, T的第一行被用于控制向量中, 即下一刻的控制向量可以表示为: Ui, T(k+1)=Ui, T(k)+ΔUi, T。假设参考的偏航角为零, 即ψi, r=0, 则第i个UAV的TS在k时刻的控制量Ui, 1可以通过(25)式获得

|
(25) |
假设-π/2<φi, r, θi, r<π/2, 通过方程(3)可以推出第i个UAV的滚转角和俯仰角的参考值φi, r和θi, r分别为
|
(26) |

|
(27) |
最后, 对于第i个UAV, 在各个时刻传递给转动子系统的参考输入如下
|
(28) |
同理, 可以得到RS的最优控制U2, U3, U4和Ωr, 进而应用到UAV的非线性动态模型中。
3 稳定性分析(18) 式中存在积分项, 因此, 如果预测范围较大, 则(20)式的最优计算过程中会出现数值问题。从(5)式和(10)式可以看出, 系统矩阵的特征值位于单位圆边界附近, 这会使数值问题变得更糟[13]。因此, 有必要设计适当的控制器, 在保证系统闭环稳定性的同时, 避免上述的数值问题。本文提出的算法, 是在MPC算法的基础上作适当的修改, 从而实现上述功能。
为了便于分析, 以第i架无人机的TS为例, 对于αT>1, 将MPC中的成本函数按以下方式处理
|
(29) |
式中, 由于αT>1, 成本函数中的权重系数会随着预测时间的增加而减小, 因此, 在进行最优化的计算过程中, 相较于成本函数(20)式, 修改后的成本函数更加重视当前时间的状态和控制, 从而对应一个预测窗口, 新的状态序列和增量控制矢量选择为

|
(30) |

|
(31) |
矩阵


|
(32) |

|
(33) |
和增广状态空间模型(17)式类似, 

|
(34) |
因此, 具有多个约束的优化问题可以重新表示为
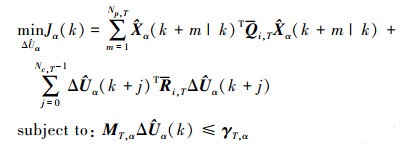
|
(35) |
式中, MT, α的表达式为
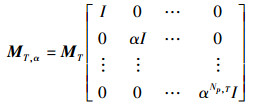
|
(36) |
从(21)式和(29)式可以看出, 这2个成本函数具有相同的形式, 此外, (29)式的最优解与(21)式也一样。因此, 如果选择适当的αT, 则成本函数(29)式可以用于MPC的计算过程, 同时保证系统矩阵
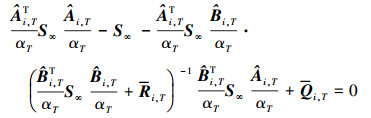
|
(37) |
式中对应的状态反馈增益矩阵KT, α和闭环系统可以表示为
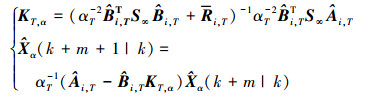
|
(38) |
因此, 可以选择合适的αT>1, 来保证(38)式中的特征根

定理1 令σT=αT-1βT, (0<βT<1), Qσ=σ2Qi, T+(1-σT2)S∞, Rσ=σT2Ri, T, 通过选择一个合适的βT, (39)式的最优解可以确保闭环系统(


|
(39) |
证明 与(35)式类似, (39)式的代数Riccati方程为
|
(40) |
将Qσ和Rσ代入(40)式中可以得到

|
(41) |
(41) 式两边同时乘以αT2βT2, 可以得到
|
(42) |
式中对应的状态反馈增益矩阵KT, σ和闭环系统为
|
(43) |
从(43)式闭环系统方程可以看出, 通过选择合适βT, 能确保特征值
综上所述, 通过(29)式和(39)式对原始成本函数(21)式进行连续变换, 等效于在最优化的求解过程中, 得到了(43)式所示的最终闭环函数。如前所述, 这样做的目的不仅保证最优计算过程中所使用模型的稳定性, 而且还能够保证闭环系统的稳定性。
4 仿真结果以3架四旋翼无人机构成的编队为例, 这里提出一种围绕半径为r的圆构成的正三角形编队, 其几何结构如图 1所示。

|
| 图 1 编队的几何结构和通信拓扑示意图 |
其中, UAV1能够接收所有的指令, 其主要任务是跟踪规划好的轨迹。无人机的主要参数见表 1。
| 参数 | 数值 |
| m/kg | 0.468 |
| l/m | 0.21 |
| Jr/(kg·m2) | 5.51×10-5 |
| Ix/(kg·m2) | 5×10-3 |
| Iy/(kg·m2) | 5×10-3 |
| Iz/(kg·m2) | 8.9×10-3 |
| b/(N·s2) | 2.8×10-5 |
| d/(N·m·s2) | 8×10-7 |
编队中3架无人机初始状态分别为: X1, T(0)=[3, 0, 
|
无人机编队的主要参数为: kx=ky=kz=0.01。MPC在滚动优化过程中的主要参数为: 
由图 2中2个子系统的闭环极点分布可以看出, 本文MMPC不仅能够保证所有闭环极点位于单位圆内, 相较于RMPC, 闭环极点能够更靠近原点, 也就保证了更多的稳定度。

|
| 图 2 TS(a)和RS(b)闭环系统的极点分布 |
通过图 3~7可以看出, 虽然干扰的存在对姿态角和三轴轨迹跟踪造成了一定程度的影响, 特别是对姿态角影响较为明显, 但由于控制器对于干扰存在鲁棒性, 使得编队的队形影响较小, 且能在很短的时间内恢复到正常状态。

|
| 图 3 约束条件下编队无人机的角度响应 |

|
| 图 4 编队无人机x轴的位移 |

|
| 图 5 编队无人机y轴的位移 |

|
| 图 6 编队无人机z轴的位移 |

|
| 图 7 干扰和约束条件下无人机的轨迹 |
图 8进一步证明了, 本文设计的控制器, 能够在很好处理约束的前提下, 实现编队稳定的轨迹跟踪和对干扰较好的鲁棒能力。

|
| 图 8 约束条件下编队无人机的输入 |
表 2则可以看出, MMPC的条件数比RMPC的要小很多, 证明了MMPC能够在实现上述控制效果的同时, 计算的复杂度能够大大降低。
本文针对四旋翼的编队问题, 提出了一种改进的多约束模型预测控制器, 该控制器是基于误差的增广模型进行设计。主要结论如下:
1) 将四旋翼的三维空间模型分为TS和RS, 并分别针对2个子系统设计相应的多约束MPC。
2) 通过对成本函数进行合理的修改, 不仅保证了滚动优化过程中所使用模型的渐进稳定, 还保证了闭环系统的稳定性。
3) 利用增广模型的特点能够消除外部干扰对于无人机路径跟踪的影响。
4) 相较于RMPC, MMPC的计算复杂度能够大大降低, 并且能够保证在多约束存在的情况下, 实现编队较好的路径跟踪。仿真结果也证明了所述方法的有效性。
未来的工作会考虑不确定性、避障和编队重构等问题。
| [1] | GUZEY H M, DIERKS T, JAGANNATHAN S, et al. Modified consensus-based output feedback control of quadrotor UAV formations using neural networks[J]. Journal of Intelligent & Robotic Systems, 2019, 94(1): 283-300. |
| [2] | YAN D, ZHANG W, CHEN H. Research on consensus formation based on double closed-loop sliding mode control[C]//2019 Chinese Control Conference, 2019: 5550-5556 |
| [3] |
魏扬, 徐浩军, 薛源. 无人机三维编队保持的自适应抗扰控制器设计[J]. 系统工程与电子技术, 2018, 40(12): 2758-2765.
WEI Yang, XU Haojun, XUE Yuan. Adaptive disturbance rejection controller design for UAV 3D formation keeping[J]. Systems Engineering and Electronics, 2018, 40(12): 2758-2765. (in Chinese) DOI:10.3969/j.issn.1001-506X.2018.12.20 |
| [4] | ZHEN Z, TAO G, XU Y, et al. Multivariable adaptive control based consensus flight control system for UAVs formation[J]. Aerospace Science and Technology, 2019, 93: 105336. DOI:10.1016/j.ast.2019.105336 |
| [5] | ILLE M, NAMERIKAWA T. Collision avoidance between multi-UAV-systems considering formation control using MPC[C]//IEEE International Conference on Advanced Intelligent Mechatronics, 2017: 651-656 |
| [6] | CHEVET T, MANIU C S, VLAD C, et al. Voronoi-based UAVs formation deployment and reconfiguration using MPC techniques[C]//2018 International Conference on Unmanned Aircraft Systems, 2018: 9-14 |
| [7] | CAI Z, ZHOU H, ZHAO J, et al. Formation control of multiple unmanned aerial vehicles by event-triggered distributed model predictive control[J]. IEEE Access, 2018, 6: 55614-55627. DOI:10.1109/ACCESS.2018.2872529 |
| [8] | HUANG H, ZHOU H, ZHENG M, et al. Cooperative collision avoidance method for multi-UAV based on Kalman filter and model predictive control[C]//2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence, 2019: 1-7 |
| [9] | WOLFE S, GIVIGI S, RABBATH C A. Distributed multiple model MPC for target tracking UAVs[C]//2020 International Conference on Unmanned Aircraft Systems, 2020: 123-130 |
| [10] | ROSA V S M, BELO E M. Virtual structure formation flight control based on nonlinear MPC[C]//2021 International Conference on Unmanned Aircraft Systems, 2021: 1383-1390 |
| [11] | ZHANG J, SUN T, LIU Z. Robust model predictive control for path-following of under actuated surface vessels with roll constraints[J]. Ocean Engineering, 2017, 143: 125-132. DOI:10.1016/j.oceaneng.2017.07.057 |
| [12] |
闫党辉, 章卫国, 陈航, 等. 具有时延和干扰约束的多无人机滑模一致性编队控制研究[J]. 西北工业大学学报, 2020, 38(2): 7.
YAN Danghui, ZHANG Weiguou, CHEN Hang, et al. Research on multi-UAVs'sliding mode consensus formation control with delay and disturbance constraints[J]. Journal of Northwestern Polytechnical University, 2020, 38(2): 7. (in Chinese) |
| [13] | WANG L. Model predictive control system design and implementation using MATLAB[M]. London: Springer Science & Business Media, 2009. |
