



目前, 基于三轴磁力计的航空磁探技术正逐步在水下军事及民用领域得以应用, 国内外已经开发了一系列磁场探测系统并且开展了对应的试验。然而随着探测距离的增加, 接收到的磁性目标磁场强度大幅衰减, 所以相比于航空磁场探测系统, 基于水下航行器的磁场测量系统可以在距离磁性目标更近的空间进行磁场特征测量, 并且可以得到更高的信噪比。因此, 配置三轴磁力计的无人水下航行器(unmanned underwater vehicle, UUV)开始应用于水面磁性目标磁场特征测量[1-2]、水下磁性物质定位和跟踪[3]以及海底磁性物理场探测[4]等任务中, 这种测量方式具有很高的机动性和灵活性。
在不考虑磁力计本身误差的情况下, 三轴磁力计的测量误差主要包括磁力计与UUV之间的安装偏差形成的测量误差、UUV上铁磁性物质产生的固定磁场以及UUV航行过程中姿态发生变化时所产生的感应磁场[5]。为了提升磁力计对水下磁性目标磁场测量的精度, 降低磁力计本身的安装偏差和UUV干扰磁场对测量结果造成的影响, 有必要对搭载于UUV上的三轴磁力计测量误差的补偿方法做深入研究。
在磁力计补偿方法的研究中, Tolles等[6]将飞机上铁磁性物质所产生的干扰磁场分为固定磁场、感应磁场以及涡流磁场, 建立了经典的Tolles-Lawson方程。乔中坤等[7]在T-L模型的基础上, 对航磁补偿技术做了进一步研究, 于振涛等[8]在椭球假设理论的基础上提出了载体干扰磁场的补偿方法, 这种方法需要三轴磁力计的测量轨迹拟合出一个椭球体方程, 也就是说需要磁力计遍历尽可能多的姿态角度, 对于载体的要求较高。
后来的学者们根据三轴磁力计测量结果和真实地磁场值之间的关系, 针对补偿参数寻优算法进行了一系列研究, 如使用Two-Step方法实现了搭载在微小型无人机上的三轴磁力计的补偿及校准[9], 这种方法具有结构简单等优势, 但是计算过程中引入了一些中间变量, 增加了补偿参数求解的不确定性。Pang等[10]提出了基于最小二乘法的三轴磁力计校准, 这种方法比Two-Step法具有一定的优势, 但是容易陷入局部最优。Li等[11]采用信赖域算法对补偿参数进行估计, 这种方法对于参数的初始值较敏感, 因此在初始值选取较好的情况下可以得到不错的补偿结果。吴志添和Zhou等[12-13]分别使用总体最小二乘法(TLS)求解了补偿校准参数; Liu等[14]使用奇异值分解方法完成了补偿参数的估计。
由于三轴磁力计测量误差的补偿参数种类较多, 估计难度高, 基于上述优化算法具有一定的难度和挑战。近些年来, 随着元启发式算法的研究, 人们发现这类算法对初始值不敏感, 适合高维度的优化搜索问题, 已有学者开始将启发式算法引入磁力计的补偿研究中, 并且证明了这类算法相比于上述优化算法的优越性。李婷等[15]针对粒子群优化算法容易陷入局部最优的缺陷, 提出了基于阻尼粒子群优化算法的磁场误差补偿, 试验结果表明相比于Two-Step, 该算法的补偿精度具有显著的优势。Zhang等[16]以某一地方的磁场强度值为常数作为约束条件, 建立了地磁场的分量补偿模型, 并使用差分进化算法(DEA)对补偿系数以及地磁场三分量进行了全局寻优, 仿真结果表明该方法的补偿结果要优于信赖域方法, 补偿后地磁场分量和总量误差均明显降低。Gao等[17]基于固定翼无人机的干扰磁场特征建立了磁场测量的误差模型, 推导了绝对误差总和表达式, 使用布谷鸟算法实现了补偿参数的寻优, 试验结果表明布谷鸟的补偿效果要优于卡尔曼滤波算法和遗传算法。基于上述分析, 国内关于载体干扰磁场的补偿研究主要是针对航磁探测系统, 除了补偿模型外, 三轴磁力计的测量精度主要受到补偿参数优化算法的影响。
本文提出了基于改进蜉蝣优化算法(improved mayfly optimization algorithm, IMOA)的磁力计磁场测量误差补偿方法。首先, 以课题组研制的遥控水下航行器(remotely operated vehicle, ROV)测磁系统为研究对象, 分析了磁力计的安装误差和ROV干扰磁场, 建立了磁力计的补偿模型; 然后, 针对蜉蝣算法容易陷入局部最优以及收敛精度差的缺点进行改进, 提出了IMOA方法; 最后, 基于IMOA方法对磁力计测量误差的补偿模型参数离线寻优, 对该方法进行验证。离线估计出来的补偿参数可以应用于后续实际测量中, 对磁场数据实时补偿, 提升ROV磁场测量系统对水下磁性目标磁场的测量精度。
1 ROV测磁系统组成ROV测磁系统主要由一个三轴磁力计、铯光泵探头、惯性导航模块(INS)、数据采集模块以及ROV运动平台组成(见图 1)。其中, ROV主要由控制舱、能源舱、推进器、浮力模块等组成, 所有的舱体均为铝合金材质, 铝合金的磁导率接近为1, 因此舱体对磁场几乎没有影响, 对磁场影响比较大的主要为ROV的8个推进器。

|
| 图 1 ROV磁场测量系统示意图 |
三轴磁力计和铯光泵探头分别固定在三轴磁力计仪器舱和铯光泵探头仪器舱内部, 并且通过铝合金测量杆固定在ROV前方不同位置处, 这种结构布局减小了ROV航行时的一些随机干扰磁场对光泵探头和三轴磁力计2种磁场测量传感器的影响。数据采集器和INS固定在数据采集器仪器舱内, 数据采集器可以对采集到的磁场信息和姿态角信息进行滤波, 数据采集模块上安装有SD卡用于数据存储。
2 三轴磁力计测量误差三轴磁力计在磁场测量过程中的误差主要由磁力计本身相对于ROV的安装误差和ROV的干扰磁场形成。其中, ROV的干扰磁场主要包括硬磁误差、软磁误差以及随机干扰磁场, 图 1所示ROV磁场测量系统中磁力计和ROV之间存在1 m以上的距离, 因此随机干扰磁场对于磁力计测量结果的影响可以忽略不计。
2.1 三轴磁力计安装误差分析在将三轴磁力计搭载于ROV的过程中, 由于安装误差的存在, 三轴磁力计的3个测量轴无法与ROV的3个坐标轴严格对准, 因此三轴磁力计对ROV干扰磁场的测量结果会有一定偏差, 如图 2所示, 其中OR-XRYRZR为ROV坐标系, Om-XmYmZm为三轴磁力计的坐标系。XR轴与ROV的纵轴方向平行, ROV航行方向为正, YR轴与ROV的横轴方向平行, ZR轴与XRYR平面垂直, 向下为正。磁力计安装偏差的影响, 会导致ORZR轴与OmZm轴之间产生夹角α, ORYR轴与OmYm轴之间产生夹角β, ORXR轴与OmXm轴之间产生夹角γ。

|
| 图 2 三轴磁力计相对于ROV的安装误差示意图 |
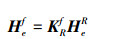
假设当地地磁场为He, 则He在ROV坐标系下的投影三分量为HeR, He在磁力计坐标系下的投影三分量为Hef, 从而可以得出HeR与Hef的数学关系表达式如公式(1)所示, 其中, KRf为ROV坐标系到三轴磁力计坐标系之间的转换矩阵, 其表达式如公式(2)所示。
|
(1) |
|
(2) |
三轴磁力计安装在ROV上测量磁场时, 由于ROV含有一些高矫顽力的硬磁性材料, 这类材料经过地磁场的长期磁化以及外界载荷的作用, 会产生一定的固定磁场, 这种磁场在短时间内会保持相同的方向和强度, 当ROV磁场测量系统组装完成后, ROV与三轴磁力计之间的相对位姿为固定的, 因此固定磁场可以表示为

|
(3) |
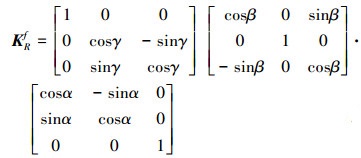
除硬磁性材料, ROV上还有高磁导率的软磁性材料(如推进器上的硅钢片等), ROV在航行过程中, 由于洋流等外界的影响, ROV的姿态会发生不同程度的变化, 从而导致软磁性材料所产生的感应磁场发生变化, 感应磁场的大小与作用在软磁性材料上外界磁场的大小成正比, 方向也由外界磁场方向决定, 当ROV的姿态改变后, 作用在三轴磁力计上的感应磁场也会发生相应的变化。感应磁场的表达式如公式(4)所示, 其中kic为感应系数矩阵。由于感应系数矩阵的各个参数只取决于软磁材料的磁属性, 当ROV磁场测量系统组装完成后, ROV的材质为固定的, 因此感应系数矩阵在相当长一段时间内不会发生变化。
|
(4) |
综合(3)式和(4)式可知, ROV干扰磁场由以下两部分组成。
|
(5) |
综上所述, 可知磁力计在水下测量地磁场过程中的输出信号与真实地磁场信号之间有如下关系

|
(6) |
式中:kfR为kRf的逆矩阵;Hm为磁力计的测量值。
由公式(6)可以推导出磁力计坐标系下的真实地磁场表达式, 如公式(7)所示。

|
(7) |
(7) 式左边代表地磁场的实际值, 右边代表根据测量结果求解的地磁场理论值。Km可以被认为是综合误差系数矩阵, 其表达式如(8)式所示,其中,I为3×3的单位矩阵。

|
(8) |
对(7)式等号两边取模可以推导得到(9)式。

|
(9) |
式中,f表示地磁场的真实值与理论值之差, 理论上f应该等于零, 从而对ROV干扰磁场的补偿问题就转化为非线性优化问题, 通常在启发式算法当中, 将(10)式看作适应度函数。

|
(10) |
在三轴磁力计测量过程中, 其周围的地磁场变化比较缓慢, 因此真实的地磁场总场值往往被当作一个不变的量。因此在(10)式中, ‖Hef‖被看作一个固定的值, 当三轴磁力计随着ROV在不同姿态下测量磁场后, 就可以根据(10)式离线估计出补偿参数, 依据得到的补偿参数可以对后续测量中的磁场数据进行实时补偿。
3 补偿参数估计算法研究蜉蝣优化算法(MOA)是希腊学者Konstantinos等[18-19]于2020年提出的一种仿生智能优化算法。根据优胜劣汰原则, 该算法通过模仿雄性蜉蝣和雌性蜉蝣生物交配过程解决复杂优化问题。蜉蝣算法在种群更新方面可以看作是兼具了粒子群优化算法快速收敛的优点和遗传算法“适者生存”的特性。但是, 蜉蝣算法也存在容易陷入局部最优、收敛精度较差的缺陷, 为此本节提出了基于Tent策略和Levy策略的改进蜉蝣优化算法(IMOA)。
3.1 原始蜉蝣算法原理假设在d维的搜索空间中, 种群中雄性和雌性蜉蝣数量分别为m个, 在第t次迭代后, 第i个雄性蜉蝣在第j维搜索空间的位置、速度以及历史最优个体分别记为xijt, vijt, pbestij, 第j维搜索空间中种群最优个体记为gbestj, 则雄性蜉蝣根据公式(11)和(12)更新当前的速度和位置。

|
(11) |
|
(12) |
式中:a1, a2为雄性蜉蝣的吸引系数; β为能见度系数; rp代表雄性蜉蝣的当前位置与历史最优位置之间的距离; rg代表雄性蜉蝣的当前位置与种群最优位置之间的距离; d代表舞蹈系数, 用于吸引雌性蜉蝣; r为随机系数, 且r∈[-1, 1]。
在第t次迭代后, 假设第i只雌性蜉蝣在第j维搜索空间中的位置和速度为yijt, vijt, 则雌性蜉蝣根据公式(13)和(14)更新当前的速度和位置。

|
(13) |
|
(14) |
式中:a3代表雌性蜉蝣的吸引系数;rm代表雄性蜉蝣与雌性蜉蝣之间的距离;fl为随机游走系数。
蜉蝣的交配是通过在雄性和雌性中分别随机选取一部分样本, 雄性最优个体和雌性最优个体进行交配, 次优的雄性个体和雌性个体进行交配, 交配后所产生的子代通过公式(15)和(16)生成。

|
(15) |

|
(16) |
式中:o1和o2代表生成的2个子代, L为随机数, 且L∈[-1, 1];m表示雄性蜉蝣; f代表雌性蜉蝣。
3.2 蜉蝣算法改进从以下2个方面进行改进: ①通过Tent混沌映射初始化蜉蝣种群, 这样不仅可以扩大种群的全局搜索范围, 还能避免种群初始化随机性引起的算法不确定性; ②采用Levy变异策略扰动部分陷入局部最优的蜉蝣个体, 提升种群在迭代过程中的多样性和抗停滞能力, 使得算法可以跳出局部最优。
混沌理论是宇宙中普遍存在的一种非线性状态, 混沌变量具有随机性、普适性, 因此可以考虑将混沌理论应用于优化搜索问题中。研究表明[20], Tent映射具有优良的遍历性和收敛速度, 适合为优化搜索问题产生比较均匀的混沌序列。Tent混沌序列通过公式(17)生成。

|
(17) |
式中, a为一个随机设置的值, 且a∈[0, 1], 初始值x0随机生成。
Levy变异策略来源于Levy飞行, 是由法国数学家Levy提出的一种非高斯随机过程, Levy飞行也是在自然界中普遍存在的一种现象, 由于其飞行步长时大时小, 因而在优化问题中可以兼顾全局优化和局部优化[21]。Levy变异的公式为
|
(18) |
式中:β∈[0, 2], μ服从N(0, σ2)分布, ν服从N(0, 1)分布。
3.3 蜉蝣算法改进后计算步骤使用改进后的MOA估计补偿参数的主要步骤如下:
step1 初始化也就是生成补偿参数的初始值, 主要包括种群规模, 目标函数的维度以及初始值的上下界, 通过公式(17)生成的Tent混沌序列初始化雄性蜉蝣和雌性蜉蝣的位置, 并对速度进行初始化, 完成适应度函数值的初始化;
step2 开始进行迭代, 首先是对雄性蜉蝣个体的更新, 通过公式(11)~(12)更新位置和速度, 并进行边界处理, 再更新全局最优适应度值;
step3 对雌性蜉蝣个体的更新, 通过公式(13)~(14)更新位置和速度, 并进行边界处理, 然后再更新全局最优适应度值;
step4 分别从更新后的雄性蜉蝣和雌性蜉蝣群体中选择部分样本, 并且挑选出最优、次优等, 根据公式(15)~(16)更新种群;
step5 根据轮盘概率, 决定蜉蝣个体是否需要Levy变异, 若需要变异, 则按照公式(18)变异更新蜉蝣的位置;
step6 更新全局最优适应度值和最优位置。若达到最大迭代次数则结束迭代, 否则转入step2重新迭代。
4 试验验证试验地点选择周边没有强磁干扰的开阔湖面, 这样测量得到的磁场仅由地磁场和ROV的干扰磁场耦合而成, 有利于对本文所提出的补偿参数估计算法进行验证。在ROV的补偿航行过程中, 需要操控ROV在不同的航向上依次改变俯仰角和横滚角, 其变化范围分别为±10°左右, 其中惯导模块的分辨率为0.1°, 动态测量精度为0.5°。ROV航行过程如图 3所示, 三轴磁力计随着ROV的航行对当地的磁场进行持续测量。

|
| 图 3 ROV湖面补偿航行示意图 |
ROV补偿航行过程中的姿态角变化如图 4所示, 从图中可以看出由于湖面水浪的作用, 除了操纵ROV做出俯仰和横滚动作外, 航行过程中俯仰角和横滚角也会发生波动。图 5为ROV航行过程中的磁场测量结果, 其中图 5a)为三轴磁力计对当地磁场3个分量的测量结果, 图 5b)为对三轴磁力计测量值矢量求和得到的磁场总量结果, 从图中可以看出随着ROV姿态的变化, 磁力计测量得到的3个分量具有较大的波动, 其中航向角的变化对X方向和Y方向的磁场测量结果影响最大, 会导致磁场测量值发生显著的改变。计算得到的磁场总量在不同的航向上也有明显的区别, 而且磁场总量的峰峰值达到了1 540 nT, 这说明了ROV的干扰磁场以及三轴磁力计的安装误差对磁力计测量结果的影响是不容忽视的, 对于三轴磁力计的测量误差进行补偿十分必要。

|
| 图 4 ROV补偿航行过程中姿态角度测量结果 |

|
| 图 5 三轴磁力计磁场测量结果 |
在对ROV补偿航行过程中测量得到的磁场信息进行补偿参数估计前, 首先基于ROV补偿航行过程中采集到的当地经度、维度、海拔以及时间, 参考国际地磁场模型(IGRF)求解出当地的背景磁场信息, 作为三轴磁力计测量误差补偿的参考基准。然后, 引入粒子群算法(PSOA)作为对比, 在相同的条件下对本文采用的MOA和IMOA进行性能评估。
图 6为基于3种不同算法估计补偿参数时适应度函数值的变化过程, 可以发现在迭代前期, 3种优化算法的适应度函数值均可快速下降, 后期出现了平稳下降。从图中可以发现大约经历1 400次迭代后MOA计算达到收敛, 经过800次迭代后PSOA和IMOA分别达到收敛, 证明IMOA计算收敛速度要优于MOA。3种算法收敛后的适应度函数值分别为2.291×105(MOA), 1.417×105(PSOA), 3.926×104(IMOA), 因此相对于MOA和PSOA算法, IMOA具有更好的收敛精度。

|
| 图 6 适应度函数值变化过程 |
分别使用3种算法估计得到的补偿参数对三轴磁力计测量得到的磁场数据补偿, 为了便于对比3种算法的补偿效果, 对部分磁场测量数据补偿后的误差曲线如图 7所示, 从图中可以发现补偿后的磁场误差明显降低。基于MOA和PSOA补偿后的磁场总量及各分量误差存在较大幅度的波动, 而基于IMOA补偿后的磁场总量和分量误差分布比较均匀。

|
| 图 7 分别基于3种算法补偿后的磁场误差 |
为了定量地说明3种算法的补偿效果, 分别使用最大绝对误差和平均绝对误差来评估磁场的补偿精度, 如表 1所示。
| 算法 | 磁场分量 | 最大绝对误差/nT | 平均绝对误差/nT |
| 补偿前 | X分量 Y分量 Z分量 磁场总量 |
25 264 28 756 7 537.1 7 830 |
16 568 8 788.5 5 030.9 6 816.1 |
| MOA 补偿后 |
X分量 Y分量 Z分量 磁场总量 |
75.11 4.85 67.65 100.85 |
16.26 1.05 13.43 18.17 |
| PSOA 补偿后 |
X分量 Y分量 Z分量 磁场总量 |
43.43 5.00 64.45 51.57 |
14.72 1.55 19.30 22.17 |
| IMOA 补偿后 |
X分量 Y分量 Z分量 磁场总量 |
32.50 2.36 29.23 36.96 |
11.09 0.79 9.41 11.72 |
对于一组磁场数据, 平均绝对误差的表达式如(19)式所示, 其中n表示磁场测量数据采样点个数, mi表示三轴磁力计测量得到的第i组采样点磁场值, xi表示第i组磁场数据经过补偿后的结果。
|
(19) |
通过表 1可以发现: 经过补偿后的地磁场总量及3个分量最大绝对误差和平均绝对误差都得到了显著的降低。基于IMOA补偿后, 磁场的X分量、Y分量、Z分量以及总场的最大绝对误差分别下降到真实磁场的0.58%, 0.53%, 0.059%以及0.55%。从表 1可以看出, 与基于MOA和PSOA的补偿方法相比, 基于IMOA的补偿方法在磁场各分量和总量上具有较高的补偿精度。
5 结论在ROV测磁系统近距离测量水面及水下磁性目标的磁场时, 磁力计会受到ROV的干扰磁场等影响, 导致测量结果精度难以保持稳定。针对上述问题, 本文提出了一种基于改进蜉蝣算法的磁力计测量误差补偿方法。针对外场试验中采集到的地磁场数据, 分别基于MOA、PSOA和IMOA 3种方法对补偿参数离线估计, 并且将得到的补偿参数应用到实际测量的磁场数据当中。试验结果表明, IMOA方法能够对磁力计的测量误差有效补偿, 在相同的条件下, IMOA比MOA以及PSOA方法具有更优良的收敛速度和收敛精度。在后续的研究中, 需要对IMOA的相关参数进一步寻优, 此外, 有必要将三轴磁力计本身的非正交误差、零偏因子以及零漂误差等因素考虑到补偿模型当中, 从而更加精确地测量水面及水下磁性目标的磁场。
| [1] | WALKER C, STRINGFIELD J. Measurement of the magnetic signature of a moving surface vessel with multiple magnetometer-equipped AUVs[J]. Ocean Engineering, 2013, 64(8): 80-87. |
| [2] | LI L, LIU W, LI L, et al. Magnetic signature measurement of surface ship using a rov-equipped with magnetometer[C]//MTS/IEEE Oceans Conference, Singapore, 2020: 1-5 |
| [3] | LIU S, CHEN Z, PAN M, et al. Magnetic anomaly detection based on full connected neural network[J]. IEEE Access, 2019, 7: 182198-182206. DOI:10.1109/ACCESS.2019.2943544 |
| [4] | JUNG J, PARK J, CHOI J, et al. Autonomous mapping of underwater magnetic fields using a surface vehicle[J]. IEEE Access, 2018, 6: 62552-62563. DOI:10.1109/ACCESS.2018.2872672 |
| [5] | GAO Q, CHENG D, WANG Y, et al. A calibration method for the misalignment error between inertial navigation system and tri-axial magnetometer in three-component magnetic measurement system[J]. IEEE Sensors Journal, 2019, 19(24): 12217-12223. DOI:10.1109/JSEN.2019.2938297 |
| [6] | TOLLES W, MINEOLA A. Magnetic field compensation system: USA, I706801[P]. 1955-04-19 |
| [7] |
乔中坤, 马国庆, 周文纳, 等. 多旋翼无人机航磁系统误差综合补偿研究[J]. 地球物理学报, 2020, 63(12): 4604-4612.
QIAO Zhongkun, MA Guoqing, ZHOU Wenna, et al. Research on the comprehensive compensation of aeromagnetic system error of multi-rotor UAV[J]. Chinese Journal of Geophysics, 2020, 63(12): 4604-4612. (in Chinese) DOI:10.6038/cjg2020O0258 |
| [8] |
于振涛, 吕俊伟, 稽绍康. 基于椭球约束的载体三维磁场补偿方法[J]. 哈尔滨工程大学学报, 2014, 35(6): 731-734.
YU Zhentao, LYU Junwei, JI Shaokang. A compensation method for the vehicle 3-D magnetic field based on ellipsoid constraint[J]. Journal of Harbin Engineering University, 2014, 35(6): 731-734. (in Chinese) |
| [9] |
吴永亮, 王田苗, 梁建宏. 微小型无人机三轴磁强计现场误差校正方法[J]. 航空学报, 2011, 32(2): 330-336.
WU Yongliang, WANG Tianmiao, LIANG Jianhong. In-suit error calibration of three-axis magnetometer for unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(2): 330-336. (in Chinese) |
| [10] | PANG H, LI J, CHEN D, PAN M, et al. Calibration of three-axis fluxgate magnetometers with nonlinear least square method[J]. Measurement, 2013, 46(4): 1600-1606. DOI:10.1016/j.measurement.2012.11.001 |
| [11] | LI J, ZHANG Q, CHEN D, et al. Magnetic interferential field compensation in geomagnetic measurement[J]. Transactions of the Institute of Measurement and Control, 2013, 36(2): 244-251. |
| [12] |
吴志添, 武元新, 胡小平, 等. 基于总体最小二乘的捷联三轴磁力仪标定与地磁场测量误差补偿[J]. 兵工学报, 2012, 33(10): 1202-1209.
WU Zhitian, WU Yuanxin, HU Xiaoping, et al. Calibration of strapdown three-axis magnetometer and measurement error compensation of geomagnetic field based on total least squares[J]. Acta Armamentarii, 2012, 33(10): 1202-1209. (in Chinese) |
| [13] | ZHOU Y, ZHANG X, XIAO W. Calibration and compensation method of three-axis geomagnetic sensor based on pre-processing total least square iteration[J]. Journal of Instrumentation, 2018, 13(4): T04006. DOI:10.1088/1748-0221/13/04/T04006 |
| [14] | LIU Z, ZHANG Q, PAN M, et al. Magnetic disturbance field compensation of a geomagnetic vector measuring instrument[J]. IEEE Geoscience & Remote Sensing Letters, 2018, 13: 356-361. |
| [15] |
李婷, 张金生, 王仕成, 等. 基于阻尼粒子群优化的地磁场测量误差补偿[J]. 仪器仪表学报, 2017, 38(10): 2446-2452.
LI Ting, ZHANG Jinsheng, WANG Shicheng, et al. Compensation of geomagnetic field measurement error based on damped particle swarm optimization[J]. Chinese Journal of Scientific Instrument, 2017, 38(10): 2446-2452. (in Chinese) |
| [16] | ZHANG Q, WAN C, PAN M, et al. A component compensation method for magnetic interferential field[J]. Journal of Applied Geophysics, 2017, 139: 331-337. |
| [17] | GAO Q, ZHAO J, CHENG D, et al. A compensation method for the carrier interference of a three-component magnetic measurement system using a Cuckoo search algorithm[J]. Measurement Science and Technology, 2018, 29(8): 1-8. |
| [18] | KONSTANTINOS Z, STELIOS T. A mayfly optimization algorithm[J]. Computer&Industrial Engineering, 2020, 145: 1-23. |
| [19] | GAO Z, ZHAO J. The improved mayfly optimization algorithm[J]. Journal of Physics Conference Series, 2020, 1684: 1-8. |
| [20] | LIANG S, HAO Q, LI J, et al. Chaos optimization algorithm based Tent map[J]. Control and Decision, 2005(2): 179-182. |
| [21] | YANG X S, DEB S. Cuckoo search via levy flight[C]//Proceedings of World Congress on Nature & Biologically Inspired Computing, Coimbatore, 2010: 210-214 |
