



2. 西北工业大学 无人机特种技术国防科技重点实验室, 陕西 西安 710072
飞翼布局矢量推力无人机去除了机体外部平尾、垂尾等突起部件, 具有隐身性好、航程远等特点, 同时也具备不输于常规飞机的机动能力。该机由多组气动舵面通过差动偏转为机体提供所需的控制力与力矩。多执行机构设计赋予了系统较高冗余配置,同时也增加了舵面故障的概率。在面临突发舵面故障情况时, 如何通过容错控制来保证飞机安全飞行, 是本文的研究重点。
国内外学者在无人机舵面故障的容错控制领域已获得了不少研究成果, 针对固定翼无人机舵面故障容错控制, 文献[1]分析了单侧副翼卡死后, 故障飞机的受力情况; 建立侧向故障运动方程组, 通过力矩平衡关系, 利用方向舵和旁侧副翼提供额外控制力矩补偿飞机姿态, 扼制故障飞机进入荷兰滚模态。考虑到飞行容错控制对实时性有较高的需求, 文献[2]提出一种基于滑模控制的舵面故障在线容错方案, 按执行机构的有效性级别将控制指令重新分配给剩余有效舵面。文献[3]针对飞机在复杂干扰环境下的舵面故障问题, 提出了一种基于级联滑模观测干扰解耦的故障重构策略。文献[4]在文献[1]的基础上, 提出了一种利用侧滑角来配平不对称滚转力矩的方法, 通过牺牲飞机姿态来换取额外的平衡力矩。然而, 侧滑传感器本身为易损件, 导致该方法的系统稳定性不足。文献[5]提出了一种不依赖侧滑角反馈的单侧副翼卡死开环容错控制方法, 基于经典PID结构和遗传算法生成侧滑指令, 并利用洗出网络替代偏差量, 使无人机遭遇副翼卡死故障时能快速稳定, 恢复操纵性。文献[6]考虑到小型无人机单余度设计带来容错能力不足的缺陷, 采用冗余解析手法分析舵面故障带来的气动特性跳变, 并离线重构舵面控制律以恢复飞机稳定能力。文献[7]针对双发动机固定翼飞行器舵面故障, 提出了一种状态依赖制导律, 在外环制导回路和内环姿态回路之间建立反馈, 确保在姿态指令超过阈值时对飞行器加速度指令进行修正, 并完成了飞机执行机构严重损毁时的着陆仿真。
飞翼无人机气动焦点接近重心, 使其纵向接近中立稳定; 航向通道也由于没有垂尾提供航向阻尼力矩而静不稳定, 给控制律设计带来了一定挑战; 相较于固定翼无人机而言, 其故障后的再稳定也更加困难。
文献[8]针对飞翼无人机舵面卡死故障, 提出了一种基于二次规划的控制分配方法, 完成剩余舵面的重分配, 并设计了分层滑模控制策略应对不同故障干扰下的气动参数摄动, 实现对不同类型故障的鲁棒容错控制。文献[9]设计了一种自适应容错控制器, 利用飞翼无人机多组舵面的高冗余特性, 对剩余可用舵面进行控制重构, 补偿故障舵面的舵效损失。为了解决含非线性约束的多操纵面飞机舵面故障带来的安全隐患, 文献[10]提出一种基于神经网络补偿的自适应滑模容错控制器, 利用加权伪逆法实现故障后的气动舵面分配, 并设计自适应项补偿舵面非线性。
上述分析表明, 国内外学者在无人机舵面故障容错控制方面的研究主要集中在固定翼机型, 对多操纵舵面的飞翼机关注较少; 现有的飞翼无人机容错控制方法, 一般通过剩余有效舵面的重分配来稳定飞机, 此种方法极大限制了可用舵面裕度, 压缩了系统控制冗余, 降低了飞机的可操纵性, 此时飞机不再具备继续遂行任务的能力。
本文针对飞翼布局无人机气动舵面损伤故障, 从“气动舵面为主, 矢量推力为辅”的思路出发, 通过串接链的控制分配方法, 利用矢量推力部分或完全替代受损气动舵面, 使飞翼布局无人机在突发舵面损伤故障情况下具备稳定飞行的能力。
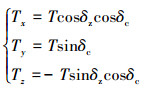
1 矢量推力发动机模型某型飞翼无人机采用单发涡喷发动机, 发动机中心轴线与机体纵轴线重合, 采用二元矢量偏转机构来实现矢量推力, 偏转机构的机械约束在±25°; 纵向推力偏转倾角用δz表示, 侧向的推力偏转倾角用δc表示。定义纵向倾角下偏为正, 侧向倾角左偏为正。由此将推力投影在机体轴三轴坐标系上。
图 1中, Tx, Ty, Tz分别是发动机推力作用在机体三轴系上的分量。从图 1可知推力分量与矢量机构偏转角关系如下
|
(1) |

|
| 图 1 矢量推力解析图 |
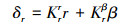
定义发动机推力线到刚体质心的距离为L, 则可知由矢量机构偏转所产生的附加力矩在滚转、俯仰、偏航通道上的分量为

|
(2) |
由于发动机的安装轴线过机体纵轴, 所以产生的附加滚转力矩为0。
2 气动舵面故障诊断 2.1 故障类型分析无人机常见气动舵面故障可划分为完全失效和部分失效2类。
1) 完全失效, 指舵面不响应控制指令, 包括舵面卡死和漂浮。
2) 部分失效, 执行机构能响应控制指令, 但无法达到预期值, 表现为舵面控制通道的增益损失, 这种故障往往不易被发现[6]。
2.2 气动舵面故障诊断模型建立1) 基准模型
提取飞行包线内的典型状态点配平作为小扰动线性化的基准状态。建立基于横纵向小扰动方程的无人机基准模型。纵向基准模型如(3)式所示

|
(3) |
横向基准模型如(4)式所示

|
(4) |
式中:v为飞行速度;α, β分别为迎角与侧滑角; θ, φ用于描述无人机的俯仰、滚转角。q, p, r分别代表俯仰、滚转、偏航角速率。系统控制输入向量u=[δe, δa, δr, δt]。
2) 舵面损伤故障模型
本文主要考虑舵面损伤后的故障重构, 舵面卡死、漂浮等执行机构完全失效的情况不在研究范围之内。假设舵面损伤程度为k, 依据横纵向基准模型可得到无人机舵面损伤故障模型。
升降舵故障模型如(5)式所示

|
(5) |
方向舵故障模型如(6)式所示

|
(6) |
3) 舵面损伤故障诊断模型
执行机构损伤后仍能部分响应控制指令, 带来了故障被忽视的风险, 故本文采用全连接神经网络来估计故障的损伤程度。
损伤程度k的取值范围在0~100%, 设计双循环函数f=(k, X), 外循环以10%为间隔单位标定损伤程度的人工标签k=[k1, k2, ki, …, k10], 内循环将ki(i依次取1~10)带入故障模型, 遍历飞行包线内的100个典型状态点X得到故障飞机输出。以基准模型为参考计算输出误差, 得到以损伤程度为标签的输出误差数据集S。
搭建全连接神经网络, 选取Sigmod激活函数表征输入输出间的非线性映射关系同时完成数据归一化。由于数据集是一个1 000行的1维列向量, 且预测输出为k1~k10(对应10%~100%损伤), 故设计全连接网络输入、隐藏层(h1, h2)与输出层的神经元个数分别为1, 50, 50, 10。
以样本标签ytrue=ki为样本真实损伤程度, 神经网络输出ypred为预测损伤程度, 定义二者均方差为损失函数L=MSE(ytrue-ypred), 用符合标准正太分布的随机数作为网络权重参数与偏置项初始值, 通过反向传播确定参数的优化方向, 结合随机梯度下降对网络进行更新。通过随机小批次采样来挑选数据集中的训练样本, 迭代1 000次后, 损失函数曲线如图 2所示。

|
| 图 2 神经网络损失函数训练曲线 |
通过故障模型得到数据样本离线训练神经网络, 用于对舵面损伤程度的在线估计, 经过1 000次迭代训练后的网络模型有着良好的预测效果, 准确率为98.6%, 预测时间<0.3 s。此时当飞机遭遇升降或方向舵面不确定损伤时, 故障诊断模型能快速估计出损伤程度。舵面损伤诊断流程如图 3所示。

|
| 图 3 舵面损伤估计流程 |
针对不同ki, 通过离线设计相应控制器, 结合基于Stateflow的滑模控制方法, 能有效应对舵面任意损伤程度下的容错控制。在标定损伤程度时, 发现当ki<50%(i<5), 飞机仍能通过调度剩余舵面裕量来保持稳定性。故本文重点考虑ki≥50%时, 舵面大范围损伤下的容错控制方法。
3 矢量推力容错控制分配方法为实现舵面大范围损伤下的无人机稳定飞行, 本文提出了一种气动舵面与矢量推力结合的容错控制方法。
3.1 气动舵面分配矢量推力飞翼布局无人机采用多舵面组合偏转的方式产生所需的气动力矩来代替垂尾和平尾。翼身左右各分布4组8个操纵舵面; 左右对称由内到外分别是δ1为升降舵; δ2为升降副翼, 既可左右两侧反偏, 控制飞机横航向通道的运动, 也可两侧同偏产生附加的俯仰力矩, 增加俯仰通道的控制效率; δ3、δ4构成差动式阻力方向舵; 方向舵单侧偏转, 根据偏转角度的不同组合, 使δ3与δ4的合力矩只产生偏航力矩, 用于对航向的增稳控制。单个舵面的极性下偏为正。无人机气动舵面布局如图 4所示。

|
| 图 4 飞翼无人机气动舵面布局 |
虚拟舵面指令到实际各操纵机构的映射分配关系如下

|
(7) |
式中:
由于矢量偏转机构具有较大惯性环节, 响应速率较慢, 且矢量偏转会造成机体纵轴推力分量的损失, 考虑到矢量推力的使用限制问题, 在气动舵效满足控制指令时, 优先使用气动舵面, 当气动舵面满偏依旧无法跟踪指令时, 引入矢量推力为飞机提供额外控制力矩。
将所需的操纵舵面控制指令δ分成2组, δ=[δaero, δthr], 飞翼无人机所需的虚拟控制量为γ, 与控制指令向量对应的控制效率向量l=[laero, lthr], 从而将控制分配问题转化为解决分段线性函数(8)式的数学问题。

|
(8) |
式中:δaero为气动舵面偏转角度;δthr为矢量偏转机构偏转角度; laero, lthr分别为对应执行机构的控制效率。控制量分配优先级从δaero到δthr递减, 首先使用气动舵面来生成虚拟控制量δaerolaero=γ1, 如果γ1=γ则分配结束; δaero=γ1/laero, 如果γ1<γ则引入矢量推力偏转机构δthr。
当气动舵面完好时, 配平舵偏远小于执行机构约束, 此时舵面裕量充分, 满足δaerolaero=γ1=γ, 分配结束。舵面损伤时, 控制效率变为laerof, 此时产生的控制量无法达到无人机所需, 即δaerolaerof=γ1f<γ, 故需引入矢量推力, 其控制指令为γ2=γ-γ1f, 进而可通过控制指令解算出矢量喷管偏转角δthr=γ2/lthr。矢量推力控制分配如图 5所示。

|
| 图 5 矢量推力控制分配模型 |
本节依据第3节提出的容错控制方法, 分别针对升降舵、方向舵进行了舵面大范围损伤下的仿真验证。
4.1 升降舵面容错控制气动舵面控制器

|
(9) |
设计针对不同ki(i≥5)的纵向矢量机构通用PID控制器(参数随ki/k5的变化浮动)

|
(10) |
以升降舵效损伤50%(ki=k5)为例, 给定初始高度500 m, 速度45 m/s, 配平俯仰角2°; 给定5°俯仰角指令进行定俯仰角爬升, 验证故障重构策略对突发升降舵损伤是否有效。
仿真结果如图 6所示。

|
| 图 6 纵向矢量推力容错控制 |
由仿真结果可知, 飞翼无人机执行定俯仰角爬升任务时, 突发升降舵面损伤后, 在18 s附近升降舵面满偏, 此时如果没有容错控制, 俯仰角进一步增大并偏离指令, 最终导致无人机姿态发散。当引入矢量推力容错控制后, 升降舵面满偏后判定此时气动舵控制指令无法满足飞机所需的控制量, 矢量推力控制指令接入, 飞机姿态得以重新稳定在指令值, 并且有效释放气动舵面的操纵裕度, 证明本设计正确, 此时矢量推力起辅助气动舵面作用, 部分替代升降舵职能。
4.2 方向舵面容错控制飞翼无人机具有航向静不稳定性, 通过将侧滑角与偏航角速率反馈到方向通道进行增稳; 当方向舵损伤时, 令剩余方向舵效仅用于增稳, 由推力转向机构负责控制航向。
气动舵面控制器
|
(11) |
设计针对不同ki(i≥5)的航向矢量偏转机构通用控制器

|
(12) |
以方向舵效损伤50%(ki=k5)为例, 高度500 m, 速度45 m/s, 初始航向角0°的巡航状态下, 给定航向角指令10°进行航向纠偏。
仿真结果如图 7~9所示。图 7为操纵机构偏转情况, 图 8和图 9分别为常规控制和矢量推力容错控制下的无人机横侧向状态量描述曲线。

|
| 图 7 操纵舵面偏转情况 |

|
| 图 8 方向舵损伤后常规控制 |

|
| 图 9 方向舵损伤后矢量推力容错控制 |
从图 7a)可知, 方向舵损伤1.5 s左右, 气动舵面(δ3, δ4为差动式阻力方向舵)满偏, 此时判定气动舵效不足以满足无人机控制量, 引入矢量推力控制策略; 矢量喷管迅速右偏(左偏为正), 为飞机提供转向力矩, 有效释放了舵面裕度(舵偏11°左右)。此时气动舵面拥有9°左右的控制裕量, 无人机操纵性得以恢复。
对比图 8~9可知, 气动舵面在1.5 s时达到满偏, 此时若采用常规控制, 侧滑角将在1 s后超过60°, 姿态发散。当接入矢量推力容错控制时, 方向角快速响应指令, 并最终收敛到稳定值; 同时航向通道能有效消除飞机侧滑(最终收敛到0.5°), 证明设计正确。此时气动舵面仅用于增稳, 矢量推力完全替代方向舵职能。
5 结论本文设计基于全连接网络的故障诊断模型来评估舵面受损情况, 并引入矢量推力容错控制策略解决舵面大范围损伤下的力矩失衡问题。利用矢量推力产生额外控制力矩, 部分或完全替代受损气动舵面; 分别完成了升降、方向舵面受损后的容错控制仿真; 结果表明, 飞机在应用容错控制策略后, 能有效释放舵面裕度, 恢复操纵性。
| [1] |
王娜, 席剑辉, 黄宇, 等. 无人机单副翼有限卡死时荷兰滚运动分析[J]. 仪器仪表学报, 2009, 30(6): 838-842.
WANG Na, XI Jianhui, HUANG Yu, et al. Analysis on dutch roll modal of unmanned aerial vehicle with the limiteddeadlocking of single aileron[J]. Chinese Journal of Scientific Instrument, 2009, 30(6): 838-842. (in Chinese) |
| [2] | ALWI H, EDWARDS C. Fault tolerant control using sliding modes with on-line control allocation[J]. Automatica, 2008, 7(44): 1859-1866. |
| [3] | NG K Y, TAN C P, OETOMO D. Disturbance decoupled fault recon-struction using cascaded sliding mode observers[J]. Automatica, 2012, 48(5): 794-799. DOI:10.1016/j.automatica.2012.02.005 |
| [4] |
吴成富, 邵朋院, 戢凤. 基于侧滑配平的单副翼极限位置卡死控制方法研究[J]. 西北工业大学学报, 2014, 32(1): 137-141.
WU Chengfu, SHAO Pengyuan, JI Feng. An effective control design for single aileron jam at ultimate point via trimming with sideslip[J]. Journal of Northwestern Polytechnical University, 2014, 32(1): 137-141. (in Chinese) |
| [5] |
闫冰, 吴成富, 邵朋院, 等. 基于遗传算法的半开环单侧副翼卡死控制[J]. 西北工业大学学报, 2016, 34(1): 79-84.
YAN Bing, WU Chengfu, SHAO Pengyuan, et al. A method for semi-open loop control of single aileron jam based on genetic algorithm[J]. Journal of Northwestern Polytechnical University, 2016, 34(1): 79-84. (in Chinese) |
| [6] |
李慎霞, 方舟, 李平. 小型无人机舵面故障的控制重构设计[J]. 计算机工程与应用, 2011, 47(7): 236-240.
LI Shenxia, FANG Zhou, LI Ping. Control reconfiguration design for control surface fault of small unmanned aerial vehicle[J]. Computer Engineering and Applications, 2011, 47(7): 236-240. (in Chinese) DOI:10.3778/j.issn.1002-8331.2011.07.068 |
| [7] | Chowdhary G, Johnson E N, Chandramohan R, et al. Guidance and control of airplanes under actuator failures and severe structural damage[J]. Journal of Guidance Control and Dynamics, 2013(4): 1093-1104. |
| [8] |
李红增, 胡昌华, 何华峰, 等. 基于滑模和控制分配的飞翼无人机容错控制方法[C]//中国控制会议, 2012: 1549-1554 LI Hongzeng, HU Changhua, HE Huafeng, et al. FTC of flying wing UAV with sliding mode and control allocation[C]//Proceeding of Chinese Control Conference, 2012: 25-27(in Chinese) |
| [9] | CHEN Jie, LI Jianxi. Fault tolerant control of uav with wing layout based on control allocation[J]. E3S Web of Conferences, 2021, 233(1): 04008. |
| [10] |
朱鹏, 董文瀚. 考虑执行器非线性的多操纵面飞机舵面故障容错控制[J]. 飞行力学, 2019, 37(5): 51-56.
ZHU Peng, DONG Wenhan. Fault-tolerant control for multi-effector aircraft actuator failure with actuator nonlinearity[J]. Flight Dynamics, 2019, 37(5): 51-56. (in Chinese) |
2. National Defense Key Laboratory of UAV Special Technology, Northwestern Polytechnical University, Xi'an 710072, China
