



基于混合电源供电系统的电动汽车性能很大程度上取决于其功率分配控制策略, 有很多研究学者提出了各种功率分配控制方法[1], 主要可分为基于逻辑门限、模糊控制以及优化算法的控制方法。
逻辑门限方法是根据设定的规则如逻辑阈值和滤波控制等, 进行混合电源的功率分配控制, 可将峰值功率和基础功率进行合理分配[2]。设置的门限阈值一般是固定不变的, 且规则相对简单易实现, 但逻辑门限策略缺少实时性, 适合功率需求波动较小的情况, 难以实现车辆复杂变工况的多变需求, 以致不能达到良好的控制效果。
模糊控制是基于模糊推理和决策的一种控制理论, 需依赖专家经验编制模糊规则库, 将参数变量进行模糊化处理, 执行设定的模糊规则, 获得理想的输出结果。模糊控制不需要建立精确的数学模型, 可较好地满足车辆复杂变工况的多变需求, 但模糊处理的过程过度依赖于专家经验, 使得其对结果精度的影响过大。
在文献[3]中, 结合基于规则和模糊控制的方法来控制混合电源功率分配, 提升电源输出能力及能量利用率。在文献[4]中, 采用了基于规则、模糊控制以及平坦度控制相结合的混合电源功率分配方法, 可有效提升能量效率。
逻辑门限法和模糊控制法因控制方式简单直观和易于实现的优点被广泛应用。然而, 其固有缺陷使得很难实现混合电源的最佳功率分配控制。具有自动化或智能化特性的优化算法作为一种先进的解决方案, 在混合电源功率分配控制研究中受到越来越多的关注。
如文献[5]中采用了动态规划算法(DP)制定混合电源功率分配策略, 以获得能量控制综合优化目标。但可以看出, 动态规划算法计算量大、寻优时间长,适合用于离线优化。有一些研究中采用诸如神经网络、模拟退火以及粒子群算法等, 解决混合电源功率分配的实时性问题。文献[6]中, 采用模型预测控制(MPC)结合神经网络进行混合电源功率分配的实时优化控制。另外, 还有基于粒子群[7]、自适应控制[8]、遗传算法[9]、庞特里亚金最小原理[10]的混合电源功率分配及参数优化研究。
在文献[11]中比较了基于动态规划、庞特里亚金最小原理、遗传算法的混合电源功率分配离线和实时的控制方法, 分析比较了优化算法在离线和实时优化过程中对优化结果的影响。文献[12]对基于自适应和随机动态规划方法的混合电源功率分配实时控制进行了对比研究, 结果发现, 基于自适应的方法从稳定性和结果精度方面都逊于随机动态规划方法。文献[13]指出,采用基于凸优化的混合电源功率分配控制, 可以有效降低能耗, 改善蓄电池退化速率。文献[14]采用了基于自适应算法的混合电源功率分配分层控制, 提升了能量效率, 降低了蓄电池退化成本。文献[15]设计了基于最优自适应及模糊自适应算法的控制器, 以实现混合电源的功率分配控制, 结果表明, 可有效降低蓄电池工作压力, 提升混合电源工作性能。文献[16]将自适应模型预测控制用于混合电源功率分配控制中, 可有效处理系统的非线性和时变特性问题, 结果表明, 可以减少能量损失, 降低蓄电池大电流输出, 提升蓄电池节能效果。文献[17]提出了一种基于混沌粒子群优化算法的混合电源功率分配控制方法, 能够有效地减少能耗以及蓄电池的工作压力。
基于优化理论的方法可实现自动化和智能化寻优控制, 针对车辆复杂多变工况下的功率需求, 功率分配控制更加精确, 在控制过程中将给定的成本函数最小化, 如能量损失最小、蓄电池衰减速率最小等。在给定的约束条件下, 可获得单个或多个最优目标。
本文以全主动配置的蓄电池/超级电容器混合电源拓扑结构为应用对象, 提出一种收敛速度快且全局搜索能力强的差分进化算法, 以期获得全局最优解, 实现多优化目标的实时功率分配控制。因功耗可有效反映能量利用率, 电流动态变化影响蓄电池温升及寿命, 在算法中充分考虑功耗和蓄电池的电流变化率2个重要参数, 建立混合电源的功耗模型, 以及混合电源的功耗、蓄电池输出电流与蓄电池电流变化率之间的函数关系, 以混合电源的功耗最小以及蓄电池输出电流变化率最小为优化目标, 并通过赋予2个优化目标不同的权重系数, 以寻求同时兼顾2个优化目标的最佳功率分配控制。
1 基于差分进化算法的功率分配策略本文采用全主动式非隔离混合电源结构, 如图 1所示, 混合电源由蓄电池和超级电容器分别联接1个双向DC/DC功率变换器, 再联接至母线端。在该配置中, 可实现2种电源的主动控制, 稳定母线电压, 便于实现混合电源的功率分配及能量流控制, 充分利用2种电源的优势特性。

|
| 图 1 混合电源电路拓扑结构 |
超级电容器可通过DC/DC功率变换器升压向驱动电机提供能量。同理, 可通过控制DC/DC功率变换器来调节蓄电池输出电流。当有功率需求时, 控制器可根据制定的功率分配策略, 分别对2个双向DC/DC功率变换器进行控制, 以实现设定目标。
1.1 差分进化算法的工作原理差分进化算法模拟了生物界种群的进化规律, 将问题的部分可能解构成一个生物种群, 然后通过一定策略如种群基因的变异、交叉等使种群进化。同时需要使用一个适应度函数来淘汰劣质个体, 并保留优质个体。通过种群多代的进化, 便可得到需要的最优解[18]。
差分进化算法是在遗传算法进化思想的基础上提出的, 不同于遗传算法控制父代杂交, 变异后产生的子代被选择, 差分算法可应用子代个体与父代个体直接竞争来获得新一代种群, 其逼近效果更好[19]。
差分进化算法相对于其他优化算法如灰狼算法、人工蚁群算法、遗传算法等来说, 虽然跳出局部搜索的能力较弱, 但具有收敛速度快、优化性能好、全局求解能力强、复杂度低等优点。相比于常用的一些优化算法, 考虑到其具有较好的综合性能, 且若采用一维函数的适应度函数, 不易陷入局部最优, 故本文选择差分进化算法用于混合电源的功率分配控制。算法流程如图 2所示。

|
| 图 2 差分进化算法流程 |
算法实施过程主要包括变异、交叉、选择等步骤。变异和交叉过程用于探索空间, 选择过程主要用来确定有希望的个体并且确保该个体的信息能够得到进一步利用。
Step1 种群初始化, 设置约束条件。将混合电源系统中蓄电池的输出电流作为初始种群个体, 在约束条件内产生初始种群。
Step2 按概率进行的变异操作, 将选中的粒子按照一定的概率改变某个基因从而产生新的粒子。变异指种群内每个个体基因改变的过程。变异过程为: 某一个体mi首先找到另外3个个体r1, r2, r3, 则mi变异后的个体为综合考虑了另外3个个体的结果。变异可表示为

|
(1) |
式中, ui是mi变异后的个体, F是变异算子, 其值位于区间(0, 1), 表示r2, r3对于变异影响的大小。所有个体经过变异后, 即可生成一个新种群。
Step3 按概率进行的交叉操作, 变异个体与目标个体之间进行基因的交换, 从而生成新的个体, 即新的蓄电池输出的电流值的大小。交叉是指原个体的每一维基因与变异后的个体进行基因互换的过程。每个个体的某一维基因是否交叉, 受到交叉概率的影响。每一维的等位基因的交叉概率均处于区间(0, 1)内。为避免交叉操作造成浪费, 需选取某一维等位基因进行交叉操作, 该维基因交叉率为100%。
交叉操作遵循如下规则:

|
(2) |
式中: vi, d为交叉后的新个体的某一维基因; ui, d为变异后的新个体的某一维基因; mi, d为变异前个体的某一维基因; d为维数; CR为交叉率, 一般取0.3。交叉过程实质上是每个原来的个体从变异后的基因中, 至少保留1个变异基因作为自己新的基因。
Step4 以混合电源的功耗最小以及蓄电池输出电流变化率最小为优化目标, 建立适应度函数, 在种群个体内进行寻优。
Step5 选择操作即模拟环境对于种群中个体的自然选择过程。其中, 适应度函数为是否淘汰某个个体的选择标准。每个个体经过计算后, 若进化后的结果优于原结果, 则该个体进化, 否则放弃本次进化。
Step6 以算法迭代到最大代数为终止条件, 输出优化结果, 得到混合电源功率损耗最优值和蓄电池输出电流及其变化率最优值。
1.3 适应度函数选取混合电源功耗主要包括双向DC/DC功率变换器的功率传输损耗、MOSFET的开关功率损耗、蓄电池以及超级电容器的充/放电损耗, 即:

|
(3) |
式中: Ploss为混合电源的总功率损耗; PBDPC, loss为双向DC/DC功率变换器的功率传输损耗; Psw, loss为MOSFET的开关功率损耗; Ib和Rb分别为蓄电池的工作电流和等效内阻; Ic和Rc分别为超级电容的工作电流和内阻。
Ic可由(4)式得到
|
(4) |
式中: Pdem为电机需求功率; Ub和Uc分别为蓄电池和超级电容的工作电压。
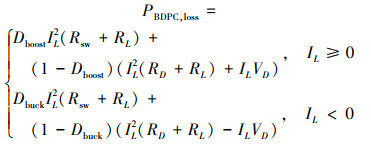
双向DC/DC功率变换器的功率传输损耗为
|
(5) |
式中: IL为电感电流; RL为电感电阻; Rsw为MOSFET的导通电阻; RD为MOSFET中并联二极管导通电阻。
MOSFET的开关功率损耗为
|
(6) |
式中: fs为开关频率; Vc为输出端电解电容电压; tr为开关上升跃迁时间; tf为下降跃迁时间; Coss为输出端电解电容容量; Qt为门电容; Vg为门电压; Qrr为反向恢复电荷。为简化计算, 在此仅考虑导通损耗, 即
|
(7) |
通过以上计算, 可将混合电源的功耗表示为蓄电池输出电流的函数。
在能量输出模式下的功率损耗为
|
(8) |

|
(9) |

|
(10) |

|
(11) |
式中: D1boost和P1BDPC, loss分别为蓄电池端双向DC/DC功率变换器工作在boost模式时的控制信号的占空比及功率传输损耗; Ib为蓄电池输出电流; D2boost和P2BDPC, loss分别为超级电容器端双向DC/DC功率变换器工作在boost模式时的控制信号的占空比及功率传输损耗; Ic为超级电容输出电流。
所建立的适应度函数f(Ib, k)包括f1(Ib, k)和f2(Ib, k)两部分, 可表示为
|
(12) |
式中: k为时间点, k=1, 2, …, N表示不同时刻; Ib, k为k时刻的蓄电池输出电流值, Ib, k-1为(k-1)时刻的蓄电池输出电流值, 设置其初值Ib, 0=0;f1(Ib, k)表示k时刻时的混合电源功率损耗, f2(Ib, k)表示k时刻的蓄电池输出电流变化率; α和β为权重系数, 且α+β=1。
本设计采用的差分进化算法的一些初始化条件见表 1。
建立了基于Matlab/simulink的仿真模型, 为便于仿真, 在不影响方法验证结论的前提下, 选取NEDC中市郊工况第3段进行仿真, 工况中包含了起动加速、匀速、减速等过程, 并将速度-时间按照比例(1/10)减小, 保持加速度不变, 缩小后的速度变化如图 3所示。假设汽车在10%坡度的坡道上行驶, 需求功率如图 4所示。

|
| 图 3 速度变化曲线 |

|
| 图 4 需求功率变化曲线 |
在仿真中, 设定蓄电池初始电压24 V、内阻0.01 Ω, 容量20 A·h, 超级电容初始电压24.3 V、内阻0.001 Ω、容量400 F, 母线参考电压48 V, 驱动电动机额定电压48 V、额定功率5 kW。
选取α=1, β=0, 即仅考虑功率损耗时, 各部分输出电流变化如图 5a)所示, 可以看出, 在整个仿真工况中, 驱动电机的实际电流能够很好地跟踪由功率需求计算得到的参考电流, 蓄电池的实际输出电流也能够很好地跟踪由功率分配控制算法计算得到的参考电流, 该参考电流是蓄电池的最优电流, 由超级电容器补充剩余的功率需求。为有效保护蓄电池, 在算法中设定其最大工作电流为30 A, 所以在加速阶段末期(2.266~2.603 s), 由算法计算的蓄电池输出电流增加到了30 A, 则控制蓄电池输出电流维持在30 A, 也可以明显地看出, 在此期间, 超级电容器自动地提供动态变化的大功率输出, 以补充负载的功率需求, 且母线电压始终被控制稳定在48 V, 如图 5b)所示。

|
| 图 5 α=1,β=0的仿真结果 |
混合电源及电机能量如图 5c)所示, 功耗变化如图 5d)所示, 能量效率如图 5e)所示, 图中理论效率是指在算法中根据功耗公式计算出的基于蓄电池最优电流的能量效率, 其可作为能量效率参考。从图中可以看出, 在车辆稳态运行如车速恒定时, 能量效率也保持稳定, 当车辆处于动态运行如加速或减速时, 能量效率也会处于一个动态变化的过程, 但在整个仿真工况中, 能量效率始终处于较大值的变化范围内, 且实际平均效率几乎与理论平均效率完全一致, 可达93%左右。
在加速、匀速、减速3个阶段中, 分别随机选取时间点, 其寻优过程如图 6所示。可以看出, 在3个阶段分别迭代至第3次、第7次、第5次时, 搜寻到最优解, 说明该算法具有较强的搜索能力及较好的收敛性。图中不同阶段的适应度值为目标函数的函数值, 此处代表系统功率损耗。

|
| 图 6 不同阶段的寻优过程 |
为做对比分析, 建立了基于模糊控制方法的功率分配目标优化模型并进行了仿真, 初始参数设置及仿真条件与上述基于差分进化算法的仿真模型一致。仿真结果如图 7所示, 可以看出, 与基于差分进化算法的结果相比, 能量效率较低, 蓄电池电流波动较大。且如上文所述, 模糊规则完全依赖于专家经验, 其对寻优结果影响很大, 一般难以获得最优解。另外, 模糊控制计算量较大, 仿真时间长, 导致算法的实现过程及优化性能都逊于差分进化算法。

|
| 图 7 模糊控制仿真结果及优化结果对比 |
当改变α和β权值时, 能量效率、蓄电池电流及功耗输出结果如图 8所示。此处需要说明的是, 由于功率变换器输出端电容存在频繁充/放电行为, 为简化测量与计算过程, 在效率计算中未考虑功率变换器输出端电容能量带来的影响。而在实证模型中, 功率变换器输出端电容具有初始能量, 在仿真的初始阶段, 功率变换器输出端电容会输出其自身存储的初始能量(使得混合电源减少一部分能量输出), 即该能量参与了实际效率的测量与计算, 从而导致计算出的实际效率大于理论值, 甚至在有些情况下会出现大于1的情况, 如图 8b)所示。由结果可以看出, 当α和β的权重发生变化时, 能量效率和蓄电池电流及电流变化率都会发生变化, 能量效率随α权值的减小(β权值的增大)而减小, 同时, 蓄电池电流及电流变化率减小, 结果表明, 功耗和蓄电池电流变化率2个优化目标的动态响应过程充分证明了所设计的功率分配优化控制的有效性, 达到了预期效果。所以, 当采用所提出的功率分配控制方法时, 针对特定的功率需求或行驶工况, 可有选择地选取α和β的权重值, 以获得需求的优化目标。

|
| 图 8 α和β取不同值的仿真结果 |
1) 提出一种基于差分进化算法的功率分配实时控制方法, 以能量效率和蓄电池电流变化率为2个优化目标, 充分利用算法的全局搜索能力, 并采用一维适应度函数避免陷入局部最优, 从而突出该算法的综合性能优势, 计算最优能量效率的同时, 获得蓄电池的最优工作电流及最小的电流变化率, 提升了能量利用率且稳定了蓄电池的能量输出。
2) 赋予2个优化目标权重系数, 并在仿真验证中, 给定多个不同的权重比组合, 结果清晰地显示了权重系数对优化目标的影响过程, 可为以获得某突出的性能目标或兼顾多个性能目标为目的的多目标优化的混合电源功率分配控制方法提供参考思路, 并为多个优化目标选取方法的研究以及多目标之间的相互影响规律的研究提供基础。
| [1] | ZHANG L, HU X, WANG Z, et al. Hybrid electrochemical energy storage systems: an overview for smart grid and electrified vehicle applications[J]. Renewable and Sustainable Energy Reviews, 2020, 139: 110581. |
| [2] | WANG Y, SUN Z, CHEN Z. Development of energy management system based on a rule-based power distribution strategy for hybrid power sources[J]. Energy, 2019, 175: 1055-1066. DOI:10.1016/j.energy.2019.03.155 |
| [3] | DAO V H, DINH T X, TRUONG A, et al. Optimization-based fuzzy energy management strategy for pem fuel cell/battery/supercapacitor hybrid construction excavator[J]. International Journal of Precision Engineering and Manufacturing-Green Technology, 2021, 8: 1267-1285. DOI:10.1007/s40684-020-00262-y |
| [4] | MARZOUGUI H, KADRI A, MARTIN J P, et al. Implementation of energy management strategy of hybrid power source for electrical vehicle[J]. Energy Conversion & Management, 2019, 195: 830-843. |
| [5] | CHEN X P, HEWITT N, LI Z T, et al. Dynamic programming for optimal operation of a biofuel micro CHP-HES system[J]. Applied Energy, 2017, 208: 132-141. DOI:10.1016/j.apenergy.2017.10.065 |
| [6] | YU S, LIN D, SUN Z, et al. Efficient model predictive control for real-time energy optimization of battery: supercapacitors in electric vehicles[J]. International Journal of Energy Research, 2020, 44(9): 7495-7506. DOI:10.1002/er.5473 |
| [7] | MESBAHI T, RIZOUG N, BARTHOLOMEVS P, et al. Optimal energy management for a Li-Ion battery/supercapacitor hybrid energy storage system based on a particle swarm optimization incorporating nelder-mead simplex approach[J]. IEEE Trans on Intelligent Vehicles, 2017, 2(2): 99-110. |
| [8] | XU D, LIU J, YAN X G, et al. A novel adaptive neural network constrained control for multi-area interconnected power system with hybrid energy storage[J]. IEEE Trans on Industrial Electronics, 2018, 65(8): 6625-6634. DOI:10.1109/TIE.2017.2767544 |
| [9] | AHMADI S, BATHAEE S, HOSSEINPOUR A H. Improving fuel economy and performance of a fuel-cell hybrid electric vehicle (fuel-cell, battery, and ultra-capacitor) using optimized energy management strategy[J]. Energy Conversion and Management, 2018, 160: 74-84. DOI:10.1016/j.enconman.2018.01.020 |
| [10] | LI X, WANG Y, YANG D, et al. Adaptive energy management strategy for fuel cell/battery hybrid vehicles using pontryagin's minimal principle[J]. Journal of Power Sources, 2019, 440: 227105. DOI:10.1016/j.jpowsour.2019.227105 |
| [11] | ODEIM F, ROES J, HEINZEL A. Power management optimization of a fuel cell/battery/supercapacitor hybrid system for transit bus applications[J]. IEEE Trans on Vehicular Technology, 2016, 65(7): 5783-5788. DOI:10.1109/TVT.2015.2456232 |
| [12] | JIANG Q, BÉTHOUX O, OSSART F, et al. A comparison of real-time energy management strategies of FC/SC hybrid power source: statistical analysis using random cycles[J]. International Journal of Hydrogen Energy, 2021, 46(63): 32192-32205. DOI:10.1016/j.ijhydene.2020.06.003 |
| [13] | EAST S, CANNON M. Optimal power allocation in battery/supercapacitor electric vehicles using convex optimization[J]. IEEE Trans on Vehicular Technology, 2020, 69(11): 12751-12762. DOI:10.1109/TVT.2020.3023186 |
| [14] | LI S, GU C, ZHAO P, et al. Adaptive energy management for hybrid power system considering fuel economy and battery longevity[J]. Energy Conversion and Management, 2021, 235: 114004. DOI:10.1016/j.enconman.2021.114004 |
| [15] | SADEQ T, WAI C K, MORRIS E, et al. Optimal control strategy to maximize the performance of hybrid energy storage system for electric vehicle considering topography information[J]. IEEE Access, 2020, 8: 216994-217007. DOI:10.1109/ACCESS.2020.3040869 |
| [16] | WANG L, WANG Y, LIU C, et al. A power distribution strategy for hybrid energy storage system using adaptive model predictive control[J]. IEEE Trans on Power Electronics, 2020, 35(6): 5897-5906. DOI:10.1109/TPEL.2019.2953050 |
| [17] | ZHAI C, LUO F, LIU Y. A novel predictive energy management strategy for electric vehicles based on velocity prediction[J]. IEEE Trans on Vehicular Technology, 2020, 69(11): 12559-12569. DOI:10.1109/TVT.2020.3025686 |
| [18] | KAI Y K, RAJENDRAN P. Differential-evolution control parameter optimization for unmanned aerial vehicle path planning[J]. Plos One, 2016, 11(3): e0150558. DOI:10.1371/journal.pone.0150558 |
| [19] | MORADI M H, ABEDINI M, TOUSI S, et al. Optimal siting and sizing of renewable energy sources and charging stations simultaneously based on differential evolution algorithm[J]. International Journal of Electrical Power & Energy Systems, 2015, 73: 1015-1024. |
