



2. 辽宁通用航空研究院, 辽宁 沈阳 110136;
3. 辽宁锐翔通用飞机制造有限公司, 辽宁 沈阳 110136;
4. 沈阳航空航天大学 航空宇航学院, 辽宁 沈阳 110136
人们普遍将运输航空与军用航空之外的航空活动统称为通用航空[1-5]。通用航空是一个定义广泛的概念,它能够执行商业运输航空(schedule commercial transport)无法完成的任务,如小型货物运输、农林作业、空中巡逻、驾驶训练、空中测绘、空中救援等。由于通用航空用途广泛,市场潜力巨大,目前通用飞机的研制正成为国内民用航空领域的新兴热点。在飞机发明史上有3个重要的标志性事件[6]:对机翼气动特性的理解和认知;发明功率足够、可靠性高的发动机;解决飞机三维飞行控制问题。上述3个问题解决之后,军用及民用航空才得到了快速发展。由此可见飞行控制系统是飞机研制的核心要素,在没有对飞控特性认识清楚之前就进行空中飞行,必然会导致严重的安全问题。因此无论是军用还是民用飞机,其研制规章规范中对飞行控制系统安全性验证都有着严格的要求。通用航空作为民用航空的重要组成部分,保证安全性依然是其第一要务。未来各种先进的飞控系统软件及硬件必将引入到通用飞机的设计中,因此对于通用飞机飞控系统安全性验证十分必要。人类个体或群体的智力和精力都是有限度的,因此人们在设计或制造新事物时不可避免地会存在各种各样的问题。发现和纠正这些“潜在”问题的唯一方法就是开展验证试验。国内外大型军用和民用飞机研制时,在飞机首飞前都搭建地面试验环境(铁鸟试验台)对其飞行控制系统开展验证试验,其主要原因如下:一是飞控系统设计与飞机结构设计往往是同时进行或更早,需要进行系统验证时飞机本体还没有;二是即使飞机外形结构已经有了,但受其寿命限制无法长时间地支撑系统试验载荷。
目前针对通用飞机铁鸟台设计的文献较少,可查阅到的多是大型飞机地面试验平台的研究。Gerkens等[7]介绍了Fairchild-Dornier728全电传飞机铁鸟台的设计,对该飞机飞行控制系统、起落架系统、液压系统和基础结构的构建进行了详细描述;Li等[8]研究了支线喷气飞机铁鸟台系统架构、测试安装结构、被测系统以及相关测试保障系统设计需求。Li等[9]研究了大型飞机铁鸟台主要设计特征,提出了模块化设计的定义和设计步骤。Hwang等[10]介绍了某倾转旋翼机地面测试平台设计,提出了测试方法、测试步骤, 给出了测试结果。Hakan等[11]对大型飞机铁鸟试验台的研制成本进行了研究,提出了利用数字孪生技术进行地面试验的思想,以降低研制成本。国内在通用飞机飞控系统地面验证试验方面几乎处于空白,研究也仅限于军用或大型民用飞机。孙银娣等[12]介绍了国内大型两栖飞机铁鸟台模拟座舱的方案设计。张勇等对铁鸟台试验的舵面加载方法进行了研究[13-16]。大型飞机使用环境严酷、系统功能组成复杂、安全等级要求高,在设计时通常以真实度做为首要指标,这必然导致其试验平台研制成本高、周期长、通用性差。通用飞机低成本、短周期、安全性等级要求不高的特性决定了遵循大型飞机的方法来设计地面试验平台既不现实也非必要。本文提出了通用飞机飞控系统地面验证试验平台的设计原则及设计方案,并构建了试验平台,实现了人在环的飞行模拟与测试。基于该平台对某型电动通用飞机进行了试验验证,试验结果表明该平台运行稳定可靠,可有效解决通用飞机飞行控制系统地面试验验证问题,提高飞机研发效率。
1 设计原则与试验要求要保证地面试验结果的正确可靠,最重要的设计原则就是试验环境尽可能真实地模拟飞机飞行实际情况。理想的试验平台应该能够完全模拟飞机真实的使用环境,实际上受到研制进度、研制经费、技术能力等方面因素的限制,人们在地面上不可能实现这一目标,只能结合实际情况有所取舍。从飞控设计维度来看,飞机的系统组成和运动逻辑如图 1所示。驾驶员对接收到的外界环境信息和飞机响应信息进行分析给出飞机操纵输入信号;飞控系统对操纵信号和传感器信号进行综合处理后给出舵偏指令;执行机构根据舵偏指令驱动气动舵面进行偏转,从而使飞机运动特性发生变化。

|
| 图 1 飞机系统组成及运动逻辑 |
图 1中飞机是由驾驶员、飞控系统、执行机构、传感器、飞机运动特性以及人机工效特性组成的闭环系统,任何一个环节出现问题,飞机安全及性能都会受到影响。因此,要真实地模拟飞控系统工作情况,地面验证试验平台设计应遵守以下原则:
·全真铁鸟试验台架;
·全真被测飞控系统;
·“真实”的人机接口;
·实时飞机运动仿真系统;
·准确的舵面载荷模拟;
·传感器驱动设备;
·数据采集与处理系统;
实施试验时要遵循从内到外,从部件到系统的验证方法。飞行控制系统包含飞控与飞机组成的回路(回路Ⅰ)以及人/飞控/飞机组成的回路(回路Ⅱ)。回路Ⅰ试验包括传感器、执行机构、人感系统等部件及飞控/飞机组成的闭环系统试验;回路Ⅱ是在Ⅰ基础上加入人的因素形成的闭环试验回路,是对飞控系统功能、性能、人机工效特性进行的人机大闭环试验验证。
典型的通用飞机是单发固定翼的轻小型飞机,它占据了通用飞机的绝大部分[17]。它们具有质量轻、体积小、包线范围窄、使用环境友好、布局形式多样、飞控系统形式简单等特点,几乎不会出现军用或大型民用飞机大载荷、高非线性、高耦合性等特征。根据图 1组成结构结合典型通用飞机的特征,飞控系统应包括以下的具体试验内容:
1) 回路Ⅰ试验
传感器试验:测试传感器静态传动比、滞环、死区、最大输出以及动态频域特性;
执行机构试验:测试静态传动比、滞环、死区和最大输出以及非线性特征;测试舵机位置和速度传感器的基本特性。
人感系统试验:通用飞机人感系统一般由驾驶杆和脚蹬组成,试验内容包括驾驶杆/脚蹬的空行程、间隙、启动力、摩擦力、杆/脚蹬位移-力特性曲线以及配平行程范围等参数特性。
控制律试验:常规机械操纵系统仅能实现一种确定的杆到舵的开环控制,其试验是指从输入(杆)到输出(舵)的各环节传动比和频率特性试验。电传操纵系统广泛使用闭环反馈控制,其试验包括开环和闭环2种形式,开环试验内容与机械系统相同;闭环试验是对电传系统与飞机本体组成的闭环系统进行测试,包含系统稳定储备、等效参数及时域性能。
2) 回路Ⅱ试验
对人/飞机/飞控组成的大闭环情况下人机工效进行评估,包括飞机响应对指令输入的跟随性,人感系统参数设置和控制显示的合理性等方面。进行人在环试验前应先根据规范和规章要求、飞行包线、飞行任务等属性制定机动动作。通用飞机试验内容应包含起飞、着陆、盘旋、上升、下滑、定常侧滑等基本动作。试验评估方法可采用客观定量和主观定性2种形式,客观定量法为飞行员对飞机实施规定的操纵输入,对输出响应进行数值分析,结合评估标准形成试验结论;主观定性法是飞行员依据自己的主观感受对飞机响应特性形成结论,可将库珀-哈珀评分等级作为主观定性法评定准则。
2 试验平台设计与实现基于上述分析,试验平台架构设计见图 2。人机接口子系统为飞行员提供人机交互环境,实现人在环飞行模拟与试验;铁鸟台架子系统可提供与真机相同的硬件布置与安装环境,同时也用于试验和采集设备的安装;飞机运动仿真是对飞机自身物理运动特性的仿真,生成系统需求的仿真参数;数据采集与处理完成激励输入信号及目标信号的采集与处理;激励输入可通过人工或外部设备为试验测试提供信号输入,包括阶跃、斜坡、扫频等信号;试验管理负责整个平台的运行控制。

|
| 图 2 试验平台原理架构 |
飞行员在飞行中感受到的信息包括空间感觉、视觉、听觉、运动感觉、操纵感觉。国内多年的飞机研发经验表明:座舱(提供空间感觉和操纵感觉)是人机接口必不可少的组成部分;视景显示(提供视觉感)对飞行品质的评估效果影响最大;音响系统(提供听觉)并非是必须的;地面运动系统(提供运动感觉)可根据具体试验需求来确定。通用飞机速度低、过载小、机动性不高,听觉及运动感觉的模拟并非必要。因此在人机接口设计中仅考虑了空间感觉、操纵感觉和视觉感,包含模拟座舱和视景显示两部分。
模拟座舱采用开放式设计,座舱底座采用独立的可移动钢架平台,用于驾驶舱内设备的安装,见图 3a),平台上方可根据座舱具体需求进行区域划分。为保证通用性,底座平台结构表面加工有条形安装凹槽,操纵装置、座椅和仪表板等座舱设备通过T形槽螺栓与底座平台组装在一起。螺栓可通过在T形槽内滑动进行位置调节,实现座舱内部布局与被模拟飞机相同,为飞行员提供正确的空间感。图 3b)是座舱安装实例,该例中分为座椅/驾驶杆区域、虚拟仪表区域两部分,并在座舱前方安装纯平视景显示系统。

|
| 图 3 通用模拟座舱 |
视景显示部分由4台计算机及3块显示屏幕构成,见图 4。主控计算机利用视景仿真软件对3个通道计算机进行视景融合,实现大视场显示。为保证视景显示实时性,飞行运动仿真数据通过反射内存网发送给主控计算机。

|
| 图 4 视景显示 |
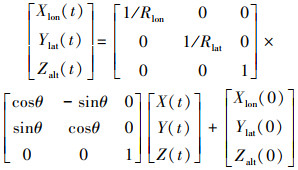
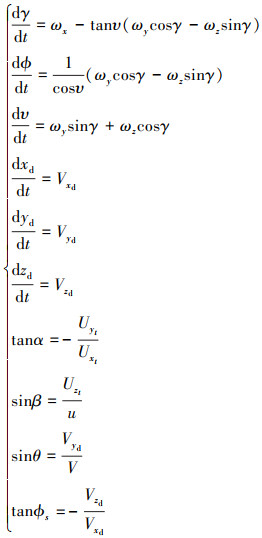
视景仿真软件需要接收飞机经度、纬度、海拔高度以及3个欧拉角的数据。本文设计了坐标转换模块, 完成笛卡尔坐标系与大地坐标系的转换。转换原理见公式1。式中{Xlon(t), Ylat(t), Zalt(t)}为飞机重心在大地坐标系中的位置, Rlon、Rlat为重心处经纬度圈的半径, θ为地面坐标系Y轴与过该点的纬度方向夹角, {X(t), Y(t), Z(t)}表示飞机重心在地面坐标系中的位置。{Xlon(0), Ylat(0), Zalt(0)}为地面坐标系原点在大地坐标系中的坐标位置。在飞行运动仿真时利用该模块将飞机的位置数据变换为大地坐标, 传输给视景软件进行处理。
|
(1) |
铁鸟台架子系统用于飞控系统真实物理部件以及试验设备的安装。要保证试验结果的正确可靠, 一方面要采用飞控系统真实物理部件进行试验, 另一方面要保证部件的安装特性与真实飞机相同。对于机械操纵系统, 试验支撑台架需要保证机械部分的安装尺寸、形式、刚度以及线路走向与真实结构尽量相同。对于纯电传系统影响其特性的主要是舵机及电缆的长度线型等, 与线缆走向和安装无关, 只需保证舵机的安装刚度要求, 而不必按1∶1的尺寸布局。
飞机舵面的载荷特性[18-19]对飞机响应和人机闭环响应有重要影响, 因此在试验时需重点对上述特性进行模拟。飞机舵面载荷包括惯性载荷和气动载荷两部分。对于惯性载荷模拟最直接的方式就是采用真实的舵面, 但该方法有成本高、占用空间大、不具备通用性的缺点。还有一种形式就是用质点等效方法进行惯量模拟, 可以克服上述缺点。气动载荷模拟有多种方法, 对于线性载荷谱可用弹簧式加载, 对于非线性载荷谱常用伺服力系统模拟。典型通用飞机在其飞行范围内满足飞机线性小扰动理论假设条件, 其气动载荷属于线性载荷范围。本平台设计中惯性载荷模拟采用双质点方法, 通过配置铰链轴前后2个飞轮的质量及至转轴的距离实现真实惯量模拟; 舵面铰链力矩则选用弹簧式加载, 通过调节弹簧刚度实现不同飞行状态模拟。
2.2.1 支撑台架设计通用飞机气动布局、操纵形式、安装形式多样, 但在总体上可以分为机身、机翼、副翼、尾翼4个部分, 飞控系统多为机械操纵系统和简单电传操纵系统。为此平台中设计了尾翼台架、副翼台架和桁架台架3种支撑台架。尾翼、副翼台架用来安装舵面特性模拟机构。桁架台架用来模拟机身和机翼结构布置, 安装操纵杆至舵面的传动机构。3种支撑台架通过空间相对位置的变换组合, 可以模拟不同类型通用飞机的线路走向。飞控系统安装形式及刚度模拟由支撑台架及其上面的支座联合完成, 支座的作用是实现系统硬件安装尺寸形式与安装刚度的真实模拟。3种台架均选用钢质材料保证平台刚度要求, 且表面加工等距T形槽, 可为支座安装提供标准物理接口, 见图 5。

|
| 图 5 通用支撑台架模型 |
1) 惯性载荷模拟
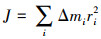
惯性载荷是指由舵面惯性力引起的相对于铰链轴处的力矩。舵面的惯性载荷

|
(2) |
式中:MJ为舵面的惯性载荷; J为舵面自身转动惯量; 
公式(2)表明舵面的惯性载荷受本身转动惯量的影响, 转动惯量相同则惯性载荷特性相同。根据刚体动力学公式, 单个质点转动惯量为

|
(3) |
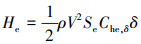
离散质点的转动惯量
|
(4) |
式中:Δmi为第i个质点的质量; ri为第i个质点到转轴的距离。因此, 可以利用单个或多个质点方法实现舵面惯性载荷等效模拟。
2) 气动载荷模拟
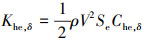
舵面气动载荷是指舵面所受到的气动力相对于铰链轴的力矩
|
(5) |
式中: ρ为大气密度; V为来流速度; Se为舵面参考面积; Che, δ为铰链力矩系数; δ为舵偏角。定义Khe, δ为舵面刚度系数
|
(6) |
则舵面的铰链力矩变为关于舵面偏角δ的函数
|
(7) |
在舵面偏角范围内Che, δ近似为常值, 故通过改变弹簧的刚度系数即可模拟不同飞行状态下的舵面刚度系数, 舵面载荷模拟的硬件组成见图 6。

|
| 图 6 舵面载荷模拟机构 |
飞机运动仿真特性应尽可能与实际飞机相同, 运动仿真模型中须包含起落架动态特性、飞行控制特性、大气特性、发动机特性、气动力特性、质量特性。运动仿真系统以飞机六自由度运动方程为基础, 采用面向组件的思想[20]进行建模, 可有效增强平台通用性, 模块组成见图 7。对于不同类型的飞机, 可根据需要对模型中相应组件进行更换。

|
| 图 7 飞机运动仿真组成 |
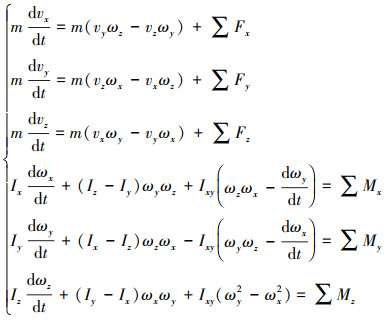
飞机六自由度方程是仿真运动最基本最重要的数学模型。它由一组非线性方程来描述, 方程中包含了质心运动方程、姿态运动方程、角度变换方程。在刚性飞机的假设条件下, 按体轴系描述的方程见公式(8)~(9)。公式(8)为飞机的运动学和角度变化方程, 公式(9)为飞机的动力学方程。飞机受到的合力及合力矩包括飞机重力、气动力、发动机推力、起落架支撑力。式中: m为飞机质量; Fx, Fy, Fz为飞机上的合外力; Mx, My, Mz为飞机上的合外力矩; vx, vy, vz为飞机体轴的线速度; ωx, ωy, ωz为飞机体轴的角速度。
|
(8) |
|
(9) |
通过对公式(8)和(9)的联合求解可求得飞机运动的各类目标参数, 飞机六自由度方程解算流程见图 8。

|
| 图 8 飞机六自由度解算流程 |
数据采集处理子系统是地面试验平台的重要组成部分。首先, 它应具备足够的采集通道及抗干扰能力, 能够完成试验中所有信号的同步采集。其次, 要保证对模拟信号有足够高的采样频率以保证高频信号不失真。最后, 它应具备对大量试验数据采集和处理能力, 并能进行在线和离线的数据分析显示。
本试验平台数据采集与处理系统构成见图 9。平台中采集处理子系统由数据存储计算机、曲线显示计算机和信号采集计算机组成, 各计算机间的数据传输采用实时网络确保系统运行的实时性。平台中需要采集的数据包括铁鸟台架和人机接口子系统的各类传感器信号、外界激励信号、飞行运动仿真数据。一般情况下外部激励信号频率范围约0~8 Hz, 角速度传感器扫频激励信号范围约0.1~40 Hz, 故系统采样周期按1 ms要求进行设计。信号采集计算机安装有模拟输入/输出卡、计数器卡、数字IO卡、交流采集卡,可实现多通道数字与模拟信号采集。试验时根据传感器类型选择相应采集板卡接入采样计算机即可。同时该计算机内安装实时操作系统和反射内存卡, 利用反射内存卡可将处理后的数据发送至实时网络供其他计算机使用。数据存储计算机安装有数据库管理系统, 负责试验数据的保存、查询、筛选与导出。曲线显示计算机可根据用户设置对选择的数据进行在线和离线的数据显示。

|
| 图 9 数据采集与处理 |
本文以某型电动通用飞机飞控系统纵向特性为例, 在平台上搭建试验环境, 对平台功能及性能进行验证, 试验布置见图 10。座舱操纵机构采用1∶1的全尺寸模型, 铁鸟台架子系统完成飞机全尺寸外形布置, 飞行状态选取及试验设计参数见表 1。

|
| 图 10 某型飞机操纵系统试验布置 |
| 参数 | 数值 |
| 飞行高度/m | 1 000 |
| 飞行速度/(km·h-1) | 110 |
| 升降舵质量/kg | 2.556 |
| 升降舵转动惯量/(kg·m2) | 0.044 1 |
| 升降舵力矩系数/rad-1升降舵面积/m2 | 0.60.56 |
飞机运动仿真模型数据均经实测及风洞试验验证。试验中选用旋转编码器做为采样传感器对杆角度及舵面偏转角度信息进行采集。
3.1 纵向人感系统试验人感系统死区是指操纵面偏度为零时, 驾驶杆或脚蹬的变化范围。测试时采用人工方法保持驾驶杆从前端-中立-后端平稳运动, 升降舵角度为0时对应的杆位移输入角度范围即为系统死区。图 11是某电动飞机系统死区试验曲线, 试验曲线的斜率与设计曲线相同, 通过试验曲线测得杆位移的死区范围为±0.8°。

|
| 图 11 系统死区试验曲线 |
杆力-杆位移特性是指驾驶杆位移随驾驶力的变化曲线。试验时在前向和后向位移范围内各选取6个状态点。拉力设置范围0~6 kg, 选取1 kg做为拉力间隔。启动力的测量受人主观感觉影响很大, 为减小测量误差, 试验中规定3个人员独立测量, 取平均值, 启动力测试结果见表 2。
根据平台采集结果数据得到了杆力-杆位移特性, 见图 12。驾驶杆力-杆位移试验曲线与理论设计曲线变化趋势一致。

|
| 图 12 杆力-杆角度(位移)曲线 |
选取升降舵到飞机运动参数的开环时域特性进行测试。时域测试选取阶跃、脉冲和倍脉冲3种典型输入[21-22]对平台的性能进行测试。
图 13为驾驶杆做阶跃输入时飞机升降舵及俯仰角速度响应曲线。飞机首先调整至给定的平飞状态, 试验人员按照试飞科目规定进行驾驶杆阶跃输入。信号输入后升降舵舵偏阶跃至15°, 并保持4 s。受俯仰阻尼特性影响, 阶跃信号输入1 s后俯仰角速度达到最大值。试验曲线的动态响应性能和静态性能与理论分析相同。

|
| 图 13 飞机阶跃响应特性 |
为进一步验证平台性能, 在驾驶杆端分别进行单脉冲及倍脉冲输入, 飞机升降舵及俯仰角速度变化见图 14~15。针对上述2种典型试验输入, 升降舵和俯仰角速度响应曲线特性和峰值与理论分析相同。

|
| 图 14 飞机单脉冲响应 |

|
| 图 15 飞机倍脉冲响应 |
飞机在动态飞行尤其是紧急情况下, 驾驶员主要凭经验和感觉操纵飞机, 通过视觉和触觉来感受飞机响应, 模拟飞机座舱外的景象是驾驶员判断飞行品质十分重要的视觉信息。试验时选取CCAR23部中正常类飞机要求的起飞、上升、定常盘旋、上升、下滑、着陆等基本机动动作, 同时设置各种天气环境进行多人次模拟飞行。试验过程中系统平台及视景显示运行流畅稳定, 试验人员反应良好。
3.4 小结上述试验表明试验平台能够完成通用飞机飞行控制系统的基本试验内容; 图 13~15舵面偏角/俯仰角速度对杆角度采样数据变化趋势一致、数据合理, 表明平台数据采集与处理功能正确有效。人在环模拟试验中平台系统运行流畅, 视景显示逼真, 飞机运动过程符合逻辑, 运动参数符合预期, 证明该平台整体性能良好, 运行稳定可靠。
4 结论1) 本文针对通用飞机飞控系统验证问题设计了一种通用验证试验平台。可满足通用飞机各种气动布局及飞控系统形式研究试验需求, 提高飞机研发效率。该平台成本低、通用性强, 具有较高的工程应用价值。
2) 基于该平台搭建了某型通用电动飞机飞行控制系统测试环境, 对其纵向特性进行试验测试, 试验结果表明平台各模块性能良好, 通过3种典型输入信号试验曲线表明该平台能够真实地模拟飞机飞行特性。该平台已应用于该型飞机的适航取证工作。
3) 目前平台主要通过人工方式实现典型信号输入, 下一步将研究信号输入的自动化, 实现正弦、扫频等复杂激励下系统性能验证, 提高平台验证能力。
| [1] |
耿建华, 王霞, 谢钧. 通用航空概论[M]. 北京: 航空工业出版社, 2007.
GENG Jianhua, WANG Xia, XIE Jun. An introduction to general aviation[M]. Beijing: Aviation Industry Press, 2007. (in Chinese) |
| [2] | JANET R. Daly bednarek, dreams of flight[M]. Texas: Texas A & M University Press, 2005. |
| [3] | JOSEPH J. Corn, the wing gospel[M]. New York: Oxford University Press, 1983. |
| [4] | ROGER E. Bilstein, the American aerospace industry[M]. New Jersey: Twayne Publisher, 1996. |
| [5] |
覃睿, 赵嶷飞, 黄燕晓. 现代通用航空基础与实务[M]. 北京: 科学出版社, 2014.
QIN Rui, ZHAO Yifei, HUANG Yanxiao. Contemporary general aviation foundation and practice[M]. Beijing: Science Press, 2014. (in Chinese) |
| [6] | BENTO S, DE Mattos. Santos dumont and the dawn of aviation[C]//AIAA Aerospace Science Meeting and Exhibit, 2004 |
| [7] | GERKENS T, FRITSCH G. The iron bird for the Fairchild-Dornier 728[J]. Aerospace Science and Technology, 2004, 8: 231-243. DOI:10.1016/j.ast.2003.11.004 |
| [8] | LI D, LIN M, TIAN L. Design of iron bird for a regional jet aircraft[J]. Proceedings of the Institution of Mechanical Engineers Part G: Journal of Aerospace Engineering, 2020, 234(3): 681-688. DOI:10.1177/0954410019879822 |
| [9] | LI Zhenshui, XI Ying. Modular design of iron bird for modern aircraft[C]//IEEE/CSAA international conference on aircraft utility system(AUS), Beijing, 2016 |
| [10] | HWANG S J, CHOI S W. Iron bird ground test for tilt rotor unmanned aerial vehicle[J]. International Journal of Aeronautical and Space Science, 2010, 11(4): 313-318. DOI:10.5139/IJASS.2010.11.4.313 |
| [11] | HAKAN Aydemir, UGUR Zengin, UMUT Durak, et al. Designing a virtual iron bird as a digital twin[C]//AIAA SciTech Forum, 2021 |
| [12] |
孙银娣, 周侣勇, 王风. 水陆两栖飞机铁鸟台简易飞行模拟座舱系统设计[J]. 航空计算技术, 2020, 50(1): 110-113.
SUN Yindi, ZHOU Lüyong, WANG Feng. Design of a simple flight simulator for iron bird platform of amphibious aircraft[J]. Aeronautical Computing Technique, 2020, 50(1): 110-113. (in Chinese) |
| [13] |
张勇, 曾宪忠, 沈宗璋. 某型飞机飞控系统地面模拟试验加载系统设计[J]. 液压与气动, 2020(10): 139-144.
ZHANG Yong, ZENG Xianzhong, SHEN Zongzhang. Loading system design for the aircraft flight control system in lab testing[J]. Hydraulics Pneumatics & Seals, 2020(10): 139-144. (in Chinese) |
| [14] |
张家盛, 段婷婷, 刘波. 大型飞机铁鸟升降舵集中式加载方法分析研究[J]. 液压与气动, 2014(8): 80-83.
ZHANG Jiasheng, DUAN Tingting, LIU Bo. Concentrated loading method for the large airplane iron bird's elevator[J]. Hydraulics Pneumatics & Seals, 2014(8): 80-83. (in Chinese) |
| [15] |
王立, 乔伟, 芦涛. 飞机飞控铁鸟试验台舵面加载系统设计[J]. 航空科学与技术, 2017, 28(3): 41-45.
WANG Li, QIAO Wei, LU Tao. Design of flight control surface loading system on iron bird test bed[J]. Aeronautical Computing Technique, 2017, 28(3): 41-45. (in Chinese) |
| [16] |
马莉, 李丽, 严超. 大型水陆两栖飞机铁鸟液压系统试验简述[J]. 液压气动与密封, 2019(6): 70-72.
MA Li, LI Li, YAN Chao. Introduction on hydraulic system test for large-scale amphibious aircraft iron bird[J]. Hydraulics Pneumatics & Seals, 2019(6): 70-72. (in Chinese) |
| [17] | BART Elias. Securing General Aviation[EB/OL]. (2009-03-03)[2021-04-21]. https://www.aopa.org/advocacy/advocacy-briefs/general-aviation-security-overview |
| [18] |
郑淑涛, 廖峰, 王立文, 等. 飞行模拟机操纵负荷系统实验研究[J]. 系统仿真学报, 2008, 20(4): 965-969.
ZHENG Shutao, LIAO Feng, WANG Liwen, et al. Experiment and study of control loading system in flight simulator[J]. Jouranl of System Simulation, 2008, 20(4): 965-969. (in Chinese) |
| [19] |
孙玉凯, 张仁嘉, 吴志刚, 等. 航模舵机的动态特性测试与系统辨识[J]. 北京航空航天大学学报, 2020, 46(2): 294-303.
SUN Yukai, ZHANG Renjia, WU Zhigang. Dynamic property test and system identification of model aircraft actuators[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 294-303. (in Chinese) |
| [20] |
徐海亮, 李骏扬, 费树岷. 全数字飞行仿真平台的设计与实现[J]. 东南大学学报, 2011, 41(1): 113-117.
XU Hailiang, LI Junyang, FEI Shumin. Design and implementation of digital flight simulation platform[J]. Journal of Southeast University, 2011, 41(1): 113-117. (in Chinese) |
| [21] |
周自全. 飞行试验工程[M]. 北京: 航空工业出版社, 2010.
ZHOU Ziquan. Flight test engineering[M]. Beijing: Aviation Industry Press, 2010. (in Chinese) |
| [22] |
陈迎春, 宋文滨, 刘洪. 民用飞机总体设计[M]. 上海: 上海交通大学出版社, 2010.
CHEN Yinchun, SONG Wenbin, LIU Hong. Civil aircraft design[M]. Shanghai: Shanghai Jiaotong University Press, 2010. (in Chinese) |
2. Liaoning General Aviation Academy, Shenyang 110136, China;
3. Rhyxeon General Aircraft Manufacturing Co. Ltd, Shenyang 110136, China;
4. Institute of Aerospace Engineering, Shenyang Aerospace University, Shenyang 110136, China
