


无人机携带对地打击武器主要有空地导弹、炸弹和火箭弹。相比于炸弹、火箭弹,空地导弹具有机动性强、射程远等优点[1]。在近几次局部地区冲突和反恐战争中空地导弹发挥了重要作用,且成为高消耗的武器产品。2016年仅中东地区的无人机载空地导弹使用次数就达到12 896次,2017年达到17 861次,而且呈现出逐年稳步增长的趋势[2]。因此,各军事强国迫切希望降低空地导弹的成本,提升作战效能。
微机械陀螺仪(MEMS陀螺仪)具有成本低、体积小、功耗低等特点,成为空地导弹降低成本的首选[3-4],但是国内MEMS技术起步较晚,尽管在基础理论、加工技术等方面取得明显的进步,但与国外同类产品相比,国产化产品的力学环境适应性还存在较大差距[3]。在实际导弹型号研制中发现国产的MEMS测姿系统仍然难以适应弹载冲击、振动环境。
框架式陀螺仪因高可靠、低成本、环境适应性好等特点[5],被广泛应用于无人机载低成本空地导弹,来测量弹体姿态角信息,而导弹姿态测量误差是影响导弹导引头捕获和命中目标的重要因素[6]。然而当采用框架式陀螺仪测量弹体姿态时,由于姿态角的定义轴和陀螺仪测量轴不一致,会产生支架误差,特别是当无人机载导弹发射后在俯仰平面存在大机动时(俯仰姿态角变化范围为+6°~-80°),姿态测量误差急剧增大,导致导弹末端导引头不能捕获目标。因此,研究框架式陀螺仪误差产生的机理,并提出相应的补偿方法,是降低导弹姿态测量误差,进而实现空地导弹低成本的重要技术途径。
框架式陀螺仪一般由转子、内环和外环组成。其工作原理是依靠陀螺仪定轴性以及低摩擦力矩的轴承保证转子、内环和外环能够灵活转动。因此其误差源主要包括由摩擦力矩带来的陀螺漂移和其固有的支架误差,其中支架误差是主要误差源。
陀螺支架误差是由于导弹的俯仰角、偏航角与倾斜角的定义轴与安装在导弹上的陀螺仪相应的输出轴不重合而产生的一种几何误差。导弹的姿态角是以地面发射坐标系为基准定义的,而二自由度框架式陀螺仪输出的信号是导弹相对陀螺外框、内框的转角,在导弹飞行过程中,陀螺仪的外框轴和内框轴的方向随着导弹姿态的变化而时刻变化着,从而导致姿态角定义轴与陀螺仪输出轴不重合。支架误差与陀螺仪在导弹上的安装方式、导弹发射初始角度、导弹飞行姿态变化有关。
关劲等[7]建立了炮兵指挥车方位引出装置框架误差模型,提出了借助定位定向装置输出的补偿方法。但该方法不适合无人机载空地导弹框架式陀螺仪支架误差的补偿。
本文基于方向余弦阵方法[8]详细推导了无人机载空地导弹燃气陀螺仪支架误差模型,分析了影响支架误差的因素,结合无人机载空地导弹姿态变化范围的特点,基于泰勒级数,推导了导弹姿态角与陀螺仪内外框输出的数学表达式,给出了支架误差补偿关系式,并提出了工程上易于实现的误差补偿方法,最后通过系统转台陀螺仪实物试验验证了陀螺仪模型的正确性及补偿方法的有效性。
1 陀螺仪支架误差模型 1.1 坐标系定义本文采用的坐标定义如下[9]:
1) 发射坐标系O′xyz:与地球固联,原点O′通常取导弹发射点在地面上的投影点;O′x轴在水平面内,指向目标或目标在地面上的投影为正;O′y轴位于含O′x轴的铅垂面内,向上为正;O′z轴按右手定则确定。
2) 弹体坐标系[8] Ox1y1z1:原点O取在导弹的质心上; Ox1轴与弹体纵轴重合, 指向弹体头部为正; Oy1轴位于弹体纵向对称平面内, 垂直于Ox1轴, 向上为正; Oz1轴垂直于x1Oy1平面, 与Ox1, Oy1轴组成右手坐标系。
3) 陀螺启动坐标系Ox0y0z0:原点O取在陀螺转子的质心上; Ox0轴与陀螺仪启动时刻外框轴重合, 指向弹体头部为正; Oy0轴与陀螺仪启动时刻内框轴重合; Oz0轴与转子轴重合, 与Ox0, Oy0轴组成右手坐标系。
4) 陀螺坐标系Ox2y2z2:原点O取在陀螺转子的质心上; Ox2轴与外框轴重合; Oy2轴与内框轴重合; Oz2轴与转子轴重合, 指向转子转动方向为正, 并与Ox2, Oy2轴组成右手坐标系。
1.2 陀螺仪在导弹上的安装方式二自由度框架式陀螺仪只要在框轴上装有电位计即可敏感2个角度。典型无人机载空地导弹上仅装有2个陀螺仪, 其中一个利用外框轴上的电位计测量俯仰角; 另一个利用外框轴上的电位计测量偏航角, 内框轴上的电位计测量滚转角。
倾斜偏航陀螺仪安装方式如图 1a)所示, 俯仰陀螺仪安装方式如图 1b)所示。

|
| 图 1 陀螺仪安装方式 |
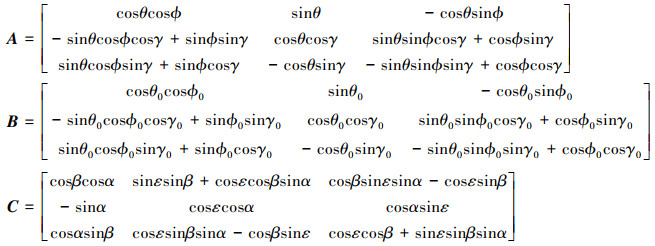
弹体坐标系Ox1y1z1和发射坐标系O′xyz之间的关系可用3个姿态角(θ, ϕ, γ)来描述, 将发射坐标系按照“YZX”的转序, 经过3次初等变换即可得到弹体坐标系, 用姿态矩阵A来表示。
陀螺启动坐标系Ox0y0z0和发射坐标系O′xyz之间的关系可用3个初始姿态角(θ0, ϕ0, γ0)来描述, 将发射坐标系按照“YZX”的转序, 经过3次初等变换矩阵即可得到陀螺启动坐标系, 用姿态矩阵B来表示。
陀螺坐标系与陀螺启动坐标系亦可用3个陀螺角(α, β, ε)来描述, 将陀螺启动坐标系按照转子轴、内框、外框的转序, 经过3次初等变换矩阵得到弹体坐标系, 用姿态矩阵C来表示, 其中, α, β为陀螺仪直接测量的角度, ε为转子转过的角度, 无法测量得到。
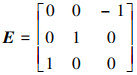
陀螺启动坐标系和弹体坐标系的关系由陀螺仪在弹体上的安装方式决定, 弹体坐标系到陀螺启动坐标系的姿态转换矩阵用E来表示。
姿态转换矩阵的关系如图 2所示, 其中E′为E的逆矩阵, B′为B的逆矩阵。

|
| 图 2 姿态转换矩阵关系图 |
由图 3易得

|
(1) |

|
| 图 3 半实物仿真结构图 |
由此可得出陀螺内外框架输出角与弹体姿态角及初始弹体姿态角的关系。
以图 1a)所示的倾斜偏航陀螺仪安装方式为例, 其中各矩阵分别是
|
对于倾斜偏航陀螺仪
|
对于俯仰陀螺仪

|
由公式(1)可构造出陀螺仪输出与导弹姿态角和初始姿态角的传递函数, 即陀螺仪输出为弹体姿态角和初始姿态角的函数。陀螺仪输出角度记为θm, ϕm, γm, 则
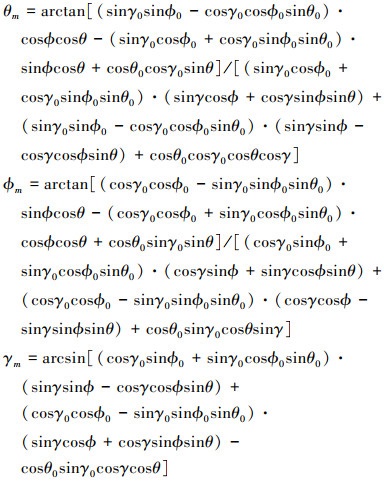
|
(2) |
由于工程实用陀螺仪转子、框架支承之间存在摩擦, 陀螺仪输出有漂移。漂移可根据陀螺仪简化方程求出:
|
(3) |
式中: 
外力矩主要有摩擦力矩、电位计摩擦力矩以及转子静不平衡力矩等。
2 陀螺仪误差仿真与试验对比 2.1 仿真与试验条件设计导弹初始姿态角为零、弹体做正弦运动;初始姿态角不为零、弹体做正弦运动;初始姿态角为无人机载导弹典型值、弹体做无人机载导弹典型运动3种条件进行数字仿真和半实物仿真[9]验证对比。半实物仿真结构图如图 3所示。构建的半实物仿真试验平台如图 4所示。半实物仿真时, 首先由仿真计算机给出导弹飞行状态姿态变化规律并作为转台运动的输入指令, 其次, 陀螺仪在气瓶的驱动下转子高速运转, 在电源的驱动下电位计输出测量角度, 再次, 对陀螺仪的输出进行补偿后即测量的姿态信息, 最后, 与仿真计算机输出的姿态指令差异即为陀螺仪测量的误差。

|
| 图 4 半实物仿真试验平台 |
取导弹发射时3个初始姿态角为θ0=ϕ0=γ0=0, 倾斜、偏航姿态角按0.3 Hz/10°正弦运动, 俯仰按0.1 Hz/70°正弦运动, 由于仿真工装的限制, 半实物仿真时仅安装倾斜偏航陀螺仪, 计算的陀螺仪输出角与实际倾斜偏航陀螺仪输出角如图 5~6所示。

|
| 图 5 偏航通道输出 |

|
| 图 6 倾斜通道输出 |
由图 5和图 6可以看出, 当初始姿态角为0时, 俯仰平面内的大机动导致倾斜陀螺仪输出支架误差明显增大, 最大误差达到9°, 偏航陀螺仪的支架误差达到6°。理论计算值与陀螺实际输出值一致, 最大误差1°, 如1.4节所述, 这是由于陀螺仪输出有漂移误差。
2.3 初始姿态不全为零、弹体正弦运动若初始姿态角不全为0, 倾斜、偏航姿态角按2 Hz/3°正弦运动, 俯仰按0.1 Hz/70°正弦运动, 半实物仿真时依然仅安装倾斜偏航陀螺仪, 计算的陀螺仪输出角与实际陀螺仪输出角如图 7~8所示。

|
| 图 7 偏航通道输出 |

|
| 图 8 倾斜通道输出 |
由图 7和图 8可以看出倾斜陀螺仪的支架误差达到10°, 偏航陀螺仪的支架误差达到11°。当初始姿态角不为零时, 陀螺仪输出支架误差会增大, 理论计算与陀螺实际输出一致表明支架误差模型推导正确。
2.4 典型无人机载导弹发射飞行条件若以典型的无人机载导弹飞行姿态为初始姿态, θ0=-2°, ϕ0=-4°, γ0=-10°, 半实物仿真时先安装倾斜偏航陀螺仪进行试验和数据采集, 然后换装俯仰陀螺仪再进行试验, 弹体姿态角与陀螺仪的输出曲线如图 9~11所示。

|
| 图 9 偏航姿态 |

|
| 图 10 滚转姿态 |

|
| 图 11 俯仰姿态 |
从图中可以看出倾斜陀螺仪的支架误差甚至达到30°, 偏航陀螺仪的支架误差达到9°, 俯仰陀螺仪的支架误差基本上保持在2°。由(2)式可以看出, 俯仰陀螺仪输出和俯仰姿态角表达式可近似为

|
(4) |
由于无人机载导弹全程倾斜稳定飞行, 由图 10可以看出, 滚转角接近0, 因此俯仰陀螺支架误差较小。
3 陀螺仪补偿措施与试验验证 3.1 补偿措施(2) 式描述了陀螺仪输出与导弹姿态角及初始姿态角之间的关系, 通过陀螺仪输出和装订的导弹初始姿态角可求出姿态角, 但其难点在于(2)式中矩阵C包含未知的变量ε, 从而无法通过矩阵元素相等原理求出其精确解。对此, 本文根据无人机载导弹的弹道特性, 通过理论计算及验证试验发现:对于无人机载导弹, 俯仰陀螺仪的支架误差可忽略, 俯仰姿态角可通过俯仰陀螺仪输出及俯仰初始角直接得到。基于上述特点, 偏航姿态角和倾斜姿态角可采用泰勒级数公式的思路按下列步骤取得精确解。
将(2)式展开后可知, 偏航姿态角可通过3个初始姿态角和俯仰姿态角以及陀螺仪的输出描述, 展开后可写为

|
(5) |
式中: k1, k2和k3为3个初始姿态角, 俯仰姿态角及陀螺仪输出的函数, 并且为已知量。

|
sinx, cosx泰勒级数可描述为
|
式中, n为自然数, 
将(5) 式泰勒级数展开, 根据无人机载空地导弹偏航姿态角变化小的特点, 略去高阶多项式得
|
(6) |
由此得到

|
根据导弹飞行过程中3个姿态角的范围以及陀螺仪启动时刻姿态角范围, 不难确定方程式(5)始终有解。分析可知, k1始终是一个接近-1的负数(最大值为-0.34), k2也是一个绝对值不超过0.02的小数。因此, 根据偏航角的范围, 选取ϕ为需要的解是合理的, 试验数据也证明了这一点。
同理可求出倾斜姿态角。
3.2 试验验证将典型无人机载导弹飞行姿态注入安装陀螺仪的三轴转台,陀螺仪输出及补偿后的姿态和转台姿态对比见图 12和图 13。

|
| 图 12 偏航姿态角对比 |

|
| 图 13 滚转姿态角对比 |
由图 12和图 13可以看出,陀螺仪输出经过补偿后,能够反映转台实际姿态角。其中偏航姿态角20 s内误差不大于0.4°,滚转姿态角20 s内误差不大于1°,这与无人机载导弹要求的滚转角测量误差不大于2.5°,偏航姿态角误差不大于1.5°相比,能够满足无人机载导弹的使用要求,补偿措施有效。
4 结论由前述分析可知:
1) 对于无人机载空地导弹而言,采用框架式陀螺仪测量姿态时,陀螺支架误差是主要误差源,在有初始滚转角和偏航角条件下,姿态误差最大可达6°,会影响导弹对目标的捕获和命中精度。
2) 陀螺仪安装方式、初始姿态角和载体的姿态变化均会引起陀螺仪支架误差的增加,其产生支架误差的本质原因为飞行力学定义的姿态角和框架式陀螺仪输出角度不一致。
3) 基于泰勒级数展开的支架误差补偿方法能够有效地减小无人机载空地导弹姿态测量误差,试验结果表明补偿后姿态测量误差可以达到0.4°以内,能够满足无人机载空地导弹使用。
| [1] |
任新联, 李刚. 美国无人机载空地导弹发展现状及趋势[J]. 飞航导弹, 2021, 2(4): 59-62.
REN Xinlian, LI Gang. Development status and trend of air-to-ground missile for unmanned aerial vehicles of United States[J]. Aerodynamic Missile Journal, 2021, 2(4): 59-62. (in Chinese) DOI:10.16338/j.issn.1009-1319.20200189 |
| [2] |
樊晨宵, 姚跃民, 薛普, 等. 小型低成本精确制导弹药技术现状及发展趋势[J]. 战术导弹技术, 2020(1): 39-46.
FAN Chenxiao, YAO Yuemin, XUE Pu, et al. Technics development situation of the low-cost precision guide ammunition[J]. Tactical Missile Technology, 2020(1): 39-46. (in Chinese) |
| [3] |
刘飞, 王汝弢, 郭中洋, 等. 国外MEMS陀螺及组合力学环境适应性技术研究进展[J]. 飞控与探测, 2019, 2(6): 12-17.
LIU Fei, WANG Rutao, GUO Zhongyang, et al. Development of mechanical environment adaptability technology for MEMS gyroscopes and modules abroad[J]. Flight Control & Detection, 2019, 2(6): 12-17. (in Chinese) |
| [4] |
赵砚驰, 程建华, 赵琳. 惯性导航系统陀螺仪的发展现状与未来展望[J]. 导航与控制, 2020, 19(4/5): 189-196.
ZHAO Yanchi, CHENG Jianhua, ZHAO Lin. Development status and future prospects of gyroscope in inertial navigation[J]. Navigation and Control, 2020, 19(4/5): 189-196. (in Chinese) |
| [5] |
刘奎, 伊龙, 崔晓卓, 等. 基于扫频振动环境的燃气陀螺仪动态漂移控制技术[J]. 中国惯性技术学报, 2010, 18(1): 111-114.
LIU Kui, YI Long, CUI Xiaozhuo, et al. Dynamic drift of gas gyro under sweep-frequency vibration mode[J]. Journal of Chinese Inertial Technology, 2010, 18(1): 111-114. (in Chinese) |
| [6] |
邹汝平, 陈士超, 陈韵, 等. 激光寻的空地导弹制导控制方法[J]. 兵工学报, 2021, 42(1): 1-10.
ZOU Ruping, CHEN Shichao, CHEN Yun, et al. A guidance control method for air-to-ground missiles with laser seekers[J]. Acta Armamentarii, 2021, 42(1): 1-10. (in Chinese) |
| [7] |
关劲, 熊成强, 张群, 等. 方位引出装置框架误差分析与修正[J]. 中国惯性技术学报, 2014, 22(4): 557-560.
GUAN Jin, XIONG Chengqiang, ZHANG Qun, et al. Analysis and correction for gimbal error of azimuth extractor[J]. Journal of Chinese Inertial Technology, 2014, 22(4): 557-560. (in Chinese) |
| [8] | JORDON J W. An accurate strapdown direction cosine algorithms[R]. Report TND-5384, NASA, 2001 |
| [9] |
林海, 王晓芳. 飞行力学数值仿真[M]. 北京: 北京理工大学出版社, 2018.
LIN Hai, WANG Xiaofang. Flight dynamics numerical simulation[M]. Beijing: Beijing Institute of Technology Press, 2018. (in Chinese) |
