



2. 西安现代控制技术研究所, 陕西 西安 710065
空间失效目标和空间碎片的增多, 导致地球卫星轨道资源日趋紧张, 面向低速翻滚的空间非合作目标的抓捕具有极大的研究价值和应用前景。由于非合作目标本身故障而丧失姿态轨道调整能力导致其不可控, 因此目标往往会因受到各种摄动和扰动影响而处于自由翻滚状态。由于传统的集成大型航天器系统体积大, 灵活性差、成本高, 在对空间低速翻滚的非合作目标进行抓捕时需要更大的安全冗余与更高精度的控制方法。与之相比, 采用小型航天器编队或集群协同抓捕非合作目标拥有更高的可靠性及灵活性, 已经引起了研究者的广泛关注[1]。由于近距离阶段相对运动姿轨耦合更加严重, 且非合作目标失控翻滚以及外部干扰的存在, 使得为航天器编队设计安全可靠的控制器变得十分困难。
到目前为止, 在多航天器的位置与姿态的协同控制方面已经有了大量的研究成果。文献[2]基于有向图设计了一种可消除多跳变时延影响的多航天器编队姿态跟踪控制律, 解决了在网络环境中的航天器编队在跳变时延条件下的姿态一致性问题。文献[3]在无角速度测量和饱和输入条件下, 针对航天器编队的姿态跟踪问题, 提出一种基于干扰观测器的终端滑模有限时间控制律。在姿态同步的基础上, 针对多航天器编队的重构与轨道保持问题, 文献[4]提出一种基于人工势场方法保持共面四边形的主从式航天器编队的编队保持方法, 实现小推力航天器的长周期轨道保持。文献[5]设计了主从式航天器的编队飞行轨道与构型, 研究了有限通信信息和变化通信拓扑条件下的航天器编队协同保持控制方法。然而, 上述文献没有考虑到实际任务中的安全避碰问题。
进一步, 考虑到工程中可能存在的空间障碍, 已经有多种避障方法被广泛研究, 如人工势场法[6]、模型预测控制[7]和最优控制方法[8]等。文献[9]研究了一种基于反步法的有限时间编队避障控制问题, 使编队可以沿着预定轨迹移动的同时避开障碍, 并最终重构为预定编队构型。文献[10]针对航天器编队中的故障容错、避障等问题, 提出一种将人工势场与自适应滑模控制律相结合的方法, 使得编队在实现目标追踪和构型保持的同时, 能够具备规避障碍物的能力。考虑到通信距离与碰撞规避约束, 文献[11]提出一种基于干扰观测器与人工势场方法相结合的航天器编队分布式协同控制方法, 保证编队航天器之间的队形保持。然而, 上述控制方法大部分考虑到编队系统内部避障, 但较少考虑航天器编队与目标的避障问题。
综上所述, 本文针对抓捕空间非合作目标的多航天器协同控制问题, 在考虑安全约束、推力约束以及终端状态编队构型约束的情况下, 提出了一种基于干扰观测器的协同避碰控制方法。本文的主要贡献如下:
1) 与文献[12]中用球体描述目标外形相比, 本文利用超二次曲面来描述目标和抓捕航天器的外形, 建立复合人工势场, 更加接近目标的几何形状, 从而实现避免碰撞的控制目标;
2) 考虑到抓捕过程中存在的外部干扰, 利用干扰观测器对复合干扰进行估计并在控制律的设计中进行抵消, 更加符合工程实际。
1 航天器相对运动模型及预备知识 1.1 坐标系建立如图 1所示, 为了描述多航天器之间的相对运动关系, 定义如下坐标系:

|
| 图 1 坐标系定义示意图 |
1) 地心惯性坐标系Fi={Oi, xi, yi, zi}。坐标系的原点Oi固定于地球质心, Oixi轴指向春分点, Oizi轴指向南极点, Oiyi轴、Oixi轴与Oizi轴共同构成右手坐标系。
2) 抓捕航天器本体坐标系Fc={Oc, xc, yc, zc}。坐标系的原点Oc固定于抓捕航天器的质心, Ocxc轴指向抓捕航天器的对接轴, Ocyc轴, Oczc轴与抓捕者的其他2个转动惯量主轴对齐, 并且Ocyc轴, Oczc轴与Ocxc轴共同构成右手坐标系。
3) 目标航天器本体坐标系Ft={Ot, xt, yt, zt}。坐标系原点Ot固定于目标航天器的质心, Otxt轴指向目标航天器主对接轴的反方向, Otyt轴, Otzt轴与抓捕者的其他2个转动惯量主轴对齐, 并且Otyt轴, Otzt轴与Otxt轴共同构成右手坐标系。
1.2 基于修正罗德里格斯参数的相对姿态运动模型基于修正罗德里格斯参数的相对姿态运动方程为[13]

|
(1) |
式中

|
(2) |
式中, σe, i∈R3为修正罗德里格斯参数, 表示抓捕航天器i相对于目标的姿态, 其中i=1, 2, 3;ωe, i∈R3表示抓捕航天器相对于目标的角速度, 其表达式为

|
(3) |
对于任意的矢量x=[x1, x2, x3]T∈R3, S(x)∈R3×3表示一个3×3的反对称矩阵, 其表达式为
|
(4) |
式中, ωc, i∈R3和ωt∈R3分别表示抓捕航天器和目标相对于地心惯性坐标系Fi的角速度; Rt, ic∈R3×3表示由目标本体系Ft到抓捕航天器本体系Fc的姿态旋转矩阵, 其表达式为

|
(5) |
抓捕航天器相对于目标的相对姿态动力学方程为[13]

|
(6) |
式中
|
(7) |

|
(8) |
式中:Jc∈R3×3表示抓捕航天器的惯量矩阵; τi∈R3和τd, i∈R3分别表示控制力矩和外界干扰力矩。
1.3 相对位置运动模型抓捕航天器相对于目标的相对位置运动方程[13]为

|
(9) |

|
(10) |
式中:ve, i∈R3表示第i个抓捕航天器相对于目标的速度矢量在其本体系Fc中的投影; mc表示抓捕航天器的质量; fi∈R3和fd, i∈R3表示控制力和外界干扰力; nt, i∈R3的表达式为
|
(11) |
式中:ρc, i∈R3表示第i个抓捕航天器相对于惯性系的位置矢量在其本体系Fc中的投影; ρt∈R3表示目标相对于惯性系的位置矢量在其本体系Ft中的投影; μ为地球引力常数; rt, i表示抓捕航天器i的期望抓捕位置; Cm, i∈R3×3的表达式为

|
(12) |
为了方便后续控制律的设计, 本文结合实际工程情况引入以下假设和引理:
假设1[14] 干扰力τ′d, i与干扰力矩f′d, i是有界的, 即






引理1[14] 对于反对称矩阵S(·), 有如下性质: 对于任意的列向量y=[y1, y2, y3]T∈R3, 有yTS(·)y=0。
引理2 本文中使用了激活函数tanh(·)及其导数cosh-2(·), 具有如下性质:
1) 对于激活函数tanh(·), 其是严格单调递增函数, 且其上下界分别为1和-1, 有‖tanh(·)‖≤1。
2) 对于函数cosh(·), 有‖cosh(·)‖≥1。对函数cosh-2(·), 有0≤‖cosh-2(·)‖≤1, 也就是说, 激活函数的导数同样是有界的。
1.5 人工势场设计为了防止碰撞以及获得更大的安全接近区域, 本文利用超二次曲面来描述非合作目标和抓捕航天器的外形, 建立复合人工势场。首先, 本文用圆柱体约束来描述目标本体, 即
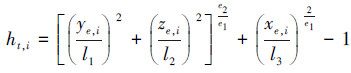
|
(13) |
式中, [xe, i, ye, i, ze, i]T=Xe, i, Xe, i=rt, i+Rc, itρe, i表示第i个抓捕航天器与目标质心的相对位置在目标本体系Ft中的投影; l1-l3是正常数, 其值影响路径约束的尺寸; e1与e2的值影响圆柱体的外形。
其次针对抓捕航天器编队内部之间的避碰问题, 将其描述为球形障碍, 即

|
(14) |
式中:Xi, j=[xi, j, yi, j, zi, j]T=Xc, i-Xc, j, i=1, 2, 3, j=1, 2, 3且i≠j, 表示抓捕航天器i和j之间的距离; l4与r1是正常数, 其值影响球形路径约束的半径。
则势函数可以表示为
|
(15) |
注1 本文介绍的基于超二次曲面描述航天器外形的方法相比于传统的球体或是椭球体能够更为准确地描述目标的外形, 为抓捕者提供更大的安全接近区域。如(13)式所述的超二次曲面, 通过调节外形参数可以用于描述各种复杂外形的航天器。如: 当e1«1, e2«1时, 可描述长方体外形; 当e1=1, e2=1时, 超二次曲面可描述椭球体外形; 当e1«1, e2=1时, 可描述圆柱体外形。
注2 所设计的势函数(15)式, 当抓捕者的位置位于路径约束外部时, 有h>0;仅当抓捕者位于路径约束的表面时有h=0;当抓捕者位于路径约束的内部时有h < 0。由此可知, 势函数κ在抓捕者由势场外部逐步向势场表面趋近的过程中会趋于无穷大, 使抓捕者不能再向势场表面靠近, 即抓捕航天器不会与目标发生碰撞。
2 基于干扰观测器的控制器设计 2.1 相对姿态控制律设计定义如下辅助量

|
(16) |
式中, k1, i为正常数。
则S1, i的导数为

|
(17) |
(17) 式可以写为如下形式

|
(18) |
设复合干扰力矩

|
(19) |
设计如下非线性干扰观测器
|
(20) |
式中, 
设干扰观测器的估计值


|
(21) |
将(20)式代入(21)式, 则有

|
(22) |
进一步, 设计如下姿态控制律

|
(23) |
式中, kw, i是常数, 且有
定理1 针对航天器姿态闭环系统(1)式和(6)式, 在复合干扰力矩作用下, 以假设1为条件, 所设计的姿态控制器律(23)式可以使相对姿态实现有界稳定, 且干扰观测器(20)式可以有效估计干扰力矩。
证明 选择Lyapunov函数
|
(24) |
其一阶导数可以写为
|
(25) |
将控制力(23)式代入上式, 可得
|
(26) |
根据杨氏不等式[13], 有
|
(27) |
将(27)式代入(26)式, 可得

|
|
(28) |
设

则(28)式可简化为
|
(29) |
对(29)式两侧同时积分, 可得
|
(30) |
由(30)式可知, S1, i和观测器误差
|
(31) |
由此说明, S1, i与观测器的观测误差
证明:
在S1, i≤ΔS1, i时, 选择如下Lyapunov函数

|
(32) |
则其导数可以写为
|
(33) |
将(1)式代入(33)式, 则有
|
(34) |

|
由此可见, 相对姿态角σe, i有界, 且最终收敛到以下区域
|
(35) |
由此, 姿态闭环系统的收敛性得证, 即定理1得证。
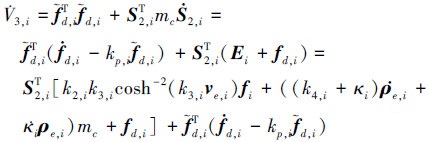
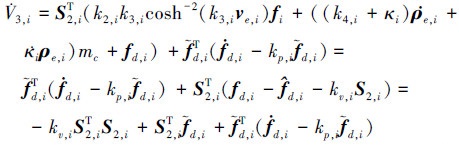
2.2 相对位置控制律设计定义如下辅助量

|
(36) |
式中, ve, i=[ve1, i, ve2, i, ve3, i]T∈R3, k2, i, k3, i, k4, i为正常数, 且

|
则S2, i的导数为
|
(27) |
式中

|
(37) 式可以写为如下形式
|
(38) |
设复合干扰力
|
(39) |
设计如下干扰观测器
|
(40) |
式中,

设干扰观测器的估计值


|
(41) |
将(40)式代入(41)式, 则有

|
(42) |
设计如下位置控制律

|
(43) |
式中, kv, i是常数, 且有
定理2 针对航天器位置闭环系统(9)式和(10)式, 考虑了复合干扰力影响的情况下, 以假设1为条件, 所设计的相对位置控制律(43)式可以使抓捕者与目标的相对位置最终实现有界稳定, 并避免与目标及抓捕者编队内部发生碰撞。同时干扰观测器(40)式可以有效估计复合干扰。
证明选择如下Lyapunov函数
|
(44) |
其一阶导数可以写为
|
(45) |
将控制力(43)式代入(45)式, 得到
|
(46) |
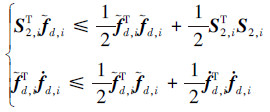
根据杨氏不等式[13]
|
(47) |
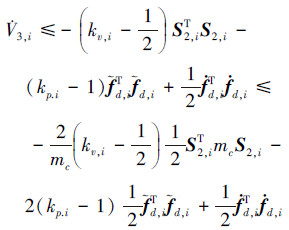
将(47)式代入(46)式, 则有
|
(48) |
设
则(48)式可简化为

|
(49) |
将(44)式代入(49)式, 可得
|
(50) |
对(50)式两侧同时积分, 可得
|
(51) |
因此, S2, i和观测器误差
|
(52) |
综上, 可知S2, i和观测器误差
由(52)式可知, 在多航天器运动过程中, S2, i是始终有界的, 另外, 根据引理2可知, 显然k2, itanh(k3, ive, i)(j=1, 2, 3)是有界的, 同时结合(36)式可得κiρe, i是有界的。根据势函数(15)式的设计以及注2, 只有航天器在与目标发生碰撞时才会有κi趋近于无穷, 因此根据κiρe, i有界, 可以得知κi是始终有界的, 即在整个任务过程中κi不会趋近于无穷。因此, 抓捕者没有违反路径约束, 即没有发生碰撞。
下面, 将对相对位置ρe, i的有界性进行证明。
证明:
当S2, i收敛至0时, 有

|
(53) |
选取如下Lyapunov函数
|
(54) |
则, V4, i的导数为

|
(55) |
根据引理1和(53)式, (55)式可以化简为

|
(56) |
根据引理2, 有tanh(k3, ive, i)≤k3, ive, i, 则(56)式可以写为
|
(57) |
由此可见, 当S2, i收敛至0时, ρe, i是渐进收敛的。
设存在常数|W|≤ΔS2, i使得

|
(58) |
则根据(52)式、(57)式和(58)式, 可得ρe, i将收敛至以下区域
|
(59) |
综上所述, 定理2得证。
3 仿真验证为验证所设计的航天器编队抓捕避碰控制方法有效性, 本文设计了仿真验证试验, 仿真对象为3个编队飞行的航天器。
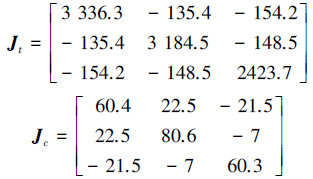
假设目标为低速翻滚的失效航天器, 其轨道六要素与初始参数如表 1所示, 初始姿态与角速度为σt(0)=[0, 0, 0]T, ωt(0)=[0.02, 0.05, -0.02]TTrad/s抓捕航天器的初始相对状态如表 2所示, 控制参数选取如表 3所示; 抓捕航天器干扰观测器初值分别为

| 初始参数 | 取值 |
| 质量mc/kg | 20 |
| Xe, 1/m | [-30, 10, -15]T |
| ve, 1/(m·s-1) | [1, 1, 0.5]T |
| σe, 1 | [0.3, 0.05, -0.2]T |
| ωe, 1/(rad·s-1) | [0.02, -0.1, 0.2]T |
| Xe, 2/m | [-30, 9, -13]T |
| ve, 2/(m·s-1) | [1, 0.5, 0]T |
| σe, 2 | [0.2, 0.05, -0.1]T |
| ωe, 2/(rad·s-1) | [0.02, -0.1, 0.2]T |
| Xe, 3/m | [-30, 11-13]T |
| ve, 3/(m·s-1) | [1, 0.5, 0]T |
| σe, 3 | [0.2, 0.05, -0.2]T |
| ωe, 3/(rad·s-1) | [0.02, -0.1, 0.2]T |
| rt, 1/m | [0, -3.5, 0]T |
| rt, 2/m | [0, 3.5, 0]T |
| rt, 3/m | [0, 0, -3.5]T |
|
外界干扰力矩和干扰力分别设为
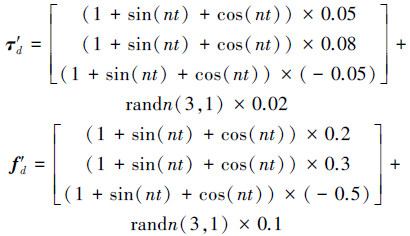
|
仿真时描述路径约束的尺寸与外形参数设定为l1=3, l2=3, l3=6, l4=1, e1=0.1, e2=1, r1=0.5, 仿真结果如图 2~9所示。其中图 2~5给出了3个抓捕航天器相对运动状态变化曲线, 由其可见, 本文所提出的控制策略可以使3个抓捕航天器的相对位置与相对速度在60 s内收敛, 相对姿态与相对角速度在70 s内收敛。

|
| 图 2 抓捕航天器编队相对位置变化曲线 |

|
| 图 3 抓捕航天器编队相对速度变化曲线 |

|
| 图 4 抓捕航天器编队相对姿态变化曲线 |

|
| 图 5 抓捕航天器编队相对角速度变化曲线 |

|
| 图 6 抓捕航天器编队观测误差变化曲线 |

|
| 图 7 抓捕航天器编队控制力和控制力矩变化曲线 |

|
| 图 8 抓捕航天器编队内部hi, j函数变化曲线 |

|
| 图 9 抓捕航天器与目标之间hit函数变化曲线 |
图 6展示了相对姿态与相对位置干扰观测器的观测误差, 从图中可以看出, 观测误差在20 s内收敛至零附近的极小区域, 在存在白噪声干扰的情况下也能够估计复合扰动的真值。
图 7展示了3个抓捕航天器的控制力与力矩变化曲线。可以看出, 抓捕者的输出力与力矩始终没有超过饱和上界, 但是由于时变干扰力的存在, 控制力与力矩最终并未收敛至零, 而且由于避障的需求, 导致控制力在收敛过程中出现部分震荡现象。图 8和图 9展示了抓捕者编队内路径约束hi, j函数以及抓捕者与目标之间的路径约束hit函数变化曲线。从图中可以看出, h始终保持大于零, 说明航天器运动过程中没有碰撞发生。
4 结论本文针对近距离低速翻滚空间非合作目标抓捕问题, 提出了一种基于干扰观测器的多航天器协同避碰抓捕控制方法。首先, 针对抓捕任务的安全性问题, 提出一种基于超二次曲面的人工势场, 其优势在于, 超二次曲面可以根据不同的参数选取描述各种尺寸及形状的路径约束, 将其用于描述多个抓捕者与目标之间的路径约束以及抓捕者内部的路径约束可以提高抓捕者的可接近范围。其次针对任务中可能出现的复合干扰问题, 设计了用于估计外界扰动的非线性干扰观测器, 并在控制律中对复合干扰进行抵消。之后设计了鲁棒控制律, 并在Lyapunov定义下证明了在该控制律作用下系统的稳定性与收敛性, 以及任务过程中航天器编队对于障碍规避的有效性。数值仿真结果说明了本文所提方法的有效性与正确性。
| [1] |
张楷田, 楼张鹏, 王永, 等. 日心悬浮轨道航天器编队飞行控制[J]. 信息与控制, 2016, 45(1): 114-119.
ZHANG Kaitian, LOU Zhangpeng, WANG Yong, et al. Control of spacecraft formation flying around heliocentric displaced orbits[J]. Information And Control, 2016, 45(1): 114-119. (in Chinese) |
| [2] |
蔡光斌, 闫杰, 赵玉山, 等. 具有随机多跳时变时延的多航天器协同编队姿态一致性[J]. 控制理论与应用, 2018, 35(10): 1415-1421.
CAI Guanbin, YAN Jie, ZHAO Yushan, et al. Attitude consensus of multi-spacecraft cooperative formation with stochastic multi-hop time-varying delay[J]. Control Theory & Applications, 2018, 35(10): 1415-1421. (in Chinese) DOI:10.7641/CTA.2018.70969 |
| [3] |
关启学, 代京, 王伟光, 姜月秋. 无角速度测量和饱和输入条件下航天器编队姿态有限时间跟踪控制[J]. 航空兵器, 2020, 27(4): 39-44 GUAN Qixue, DAI Jing, WANG Weiguang, et al. Finite-time spacecraft formation attitude tracking control with angular velocity-free measurement and saturation input[J]. Aero Weaponry, 2020, 27(4): 39-44(in Chinese) |
| [4] |
杨盛庆, 叶文郁, 何煜斌, 等. 基于势场法的卫星编队保持及其稳定性分析[J]. 系统仿真学报, 2019, 31(2): 332-338.
YANG Shengqing, YE Wenyu, HE Yubin, et al. Satellite formation keeping and its stability analysis based on artificial potential field method[J]. Journal of System Simulation, 2019, 31(2): 332-338. (in Chinese) |
| [5] |
田静, 程月华, 姜斌, 等. 有限通信情况下的航天器编队协同控制研究[J]. 航天控制, 2014, 32(4): 75-81.
TIAN Jing, CHENG Yuehua, JIANG Bin, et al. Research on cooperative control of spacecraft formation under limited information-exchange[J]. Aerospace Control, 2014, 32(4): 75-81. (in Chinese) DOI:10.3969/j.issn.1006-3242.2014.04.013 |
| [6] | LEE U, MESBAHI M. Feedback control for spacecraft reorientation under attitude constraints via convex potentials[J]. IEEE Trans on Aerospace & Electronic Systems, 2014, 50(4): 2578-2592. |
| [7] | LI P, ZHU Z H. Line-of-sight nonlinear model predictive control for autonomous rendezvous in elliptical orbit[J]. Aerospace Science and Technology, 2017, 69: 236-243. DOI:10.1016/j.ast.2017.06.030 |
| [8] | ZONG L, LUO J, WANG M. Optimal concurrent control for space manipulators rendezvous and capturing targets under actuator saturation[J]. IEEE Trans on Aerospace and Electronic Systems, 2020, 56(6): 4841-4855. DOI:10.1109/TAES.2020.3003678 |
| [9] | CONG Y Z, Du H B, JIN Q C, et al. Formation control for multiquadrotor aircraft: connectivity preserving and collision avoidance[J]. International Journal of Robust and Nonlinear Control, 2020, 30(6): 2352-2366. DOI:10.1002/rnc.4886 |
| [10] |
马广富, 董宏洋, 胡庆雷. 考虑避障的航天器编队轨道容错控制律设计[J]. 航空学报, 2017, 38(10): 206-216.
MA Guangfu, DONG Hongyang, HU Qinglei. Fault tolerant translational control for spacecraft formation flying with collision a voidance requirement[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(10): 206-216. (in Chinese) |
| [11] |
薛向宏, 岳晓奎, 袁建平. 主从式编队航天器连通性保持与碰撞规避[J]. 宇航学报, 2020, 41(7): 959-969.
XUE Xianghong, YUE Xiaokui, YUAN Jianping. Connectivity preservation and collision avoidance for leader-follower spacecraft formation flying[J]. Journal of Astronautics, 2020, 41(7): 959-969. (in Chinese) |
| [12] | WU G Q, SONG S M, SUN J G. Finite-time dynamic surface antisaturation control for spacecraft terminal approach considering safety[J]. Journal of Spacecraft and Rockets, 2018, 55(2): 1-14. |
| [13] | LI Q, SUN C, SONG S, et al. Robust adaptive control for spacecraft final proximity maneuvers with safety constraint and input quantization[J]. ISA Transactions, 2020, 11: 35-46. |
| [14] | LI Q, YUAN J P, WANG H. Sliding mode control for autonomous spacecraft rendezvous with collision avoidance[J]. Acta Astronautica, 2018, 151: 743-751. DOI:10.1016/j.actaastro.2018.07.006 |
2. Xi'an Modern Control Technology Research Institute, Xi'an 710065, China
