



提高着舰精度是舰载飞机着舰工程问题的主要研究目标[1]。在舰基降落时, 复杂海况引起的甲板运动导致理想着舰点的不确定偏移, 舰艉气流对下滑过程中的飞机状态亦造成较大干扰, 飞机自身动力学也存在不确定性[2]。上述因素都将影响舰载飞机的着舰精度, 增加着舰风险。
当前, 提高舰载飞机着舰精度的方法主要有2种[3]:①引入或改进先进飞行控制系统[4]; ②提升舵面控制权限, 增大航迹跟踪回路带宽[5]。先进飞行控制律在数值仿真机及试飞验证中均有较好的扰动抑制效果, 利用自适应控制对扰动项的预估能力及神经网络控制对不确定项的任意逼近能力可以实现对气流扰动或模型建立不确定项的在线补偿, 并提供一定的主动容错能力[4]。文献[6]将基于Levy flight的鸽群启发优化算法应用于着舰飞行控制的参数调整中, 提高了小型无人机的着舰精度, 改善着舰效果。
直接升力控制是改变飞行控制架构的重要方法之一, 通过调用襟翼通道控制权限于外环姿态控制, 改善飞机高度模态特性, 在舰载飞机低速进场阶段有利于飞机闭环稳定[7]。文献[7]给出基于直接升力控制方案的F-18舰载飞机岸基及着舰试飞结果, 验证了直接升力操纵舵面的机动增强能力与对平尾姿态控制的解耦性, 并证实着舰点分散度降低50%;文献[8]针对直接升力控制飞机对飞机机动性的改善程度, 从飞行品质评价体系层面提出包括直接升力控制效率系数、爬升速率及标准爬升率的评估标准, 以A4D战斗机为例分析了DLC系统参数在新的评估标准下对飞机飞行品质的影响。
本文提出了一种自适应模糊直接力着舰控制方案, 通过调用襟翼通道控制权限提供直接升力, 提高航迹跟踪快速性。利用模糊系统的万能逼近特性[9], 在直接升力通道自适应逼近飞机动力学及外界干扰引起的附加不确定性。引入甲板运动及舰艉气流干扰模型, 就着舰各状态变量响应进行闭环数值仿真, 并通过蒙特卡洛随机试验, 统计多次试验下舰载飞机着舰点位置信息。通过对比分析, 验证本文设计的直接升力控制方案应用于舰载机着舰飞行控制中的有效性及精确性。
1 舰载飞机着舰动力学模型的建立本节在常规舰载飞机动力学模型基础上, 首先引入襟翼直接升力通道权限, 建立新的舰载飞机非线性动力学模型。其次将给出自适应模糊直接力控制框架。
1.1 非线性动力学模型首先对舰载飞机主要状态变量进行受力分析。主要引入ḣ, 
|
(1) |
式中: [h γ V]T为飞机距理想着舰点高度、航迹角及空速; [T W]T为发动机推力及重力。
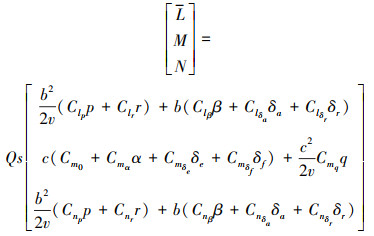
在本文设计的着舰控制系统中, 需要对常规飞机动力学模型进行扩充, 调用襟翼通道气动控制面的控制权限。在飞机动力学模型构建时, 襟翼通道的引入带来升力系数及纵向力矩系数的变化。引入直接升力控制通道后的舰载飞机气动力和力矩模型可用气动导数表示为

|
(2) |
|
(3) |
式中: [D Y L] T为舰载飞机前向力、侧向力及升力; [L M N]T为滚转、俯仰及偏航力矩; [δa δr δe δf]T为副翼、方向舵、升降舵及襟翼舵偏角。其余参数及气动导数由文献[10]给出。
结合参考文献[7]给出的其余状态变量的动力学模型, 本文引入的舰载飞机六自由度非线性模型状态方程可以近似表达为

|
(4) |
式中,X=[V α β p q r ϕ θ ψ]T, U=[δa δr δe δf δT]。本文中未指出的各变量定义与文献[9]一致。
1.2 控制架构图 1给出了设计的自适应模糊直接力着舰控制架构。该直接力着舰控制系统由解耦的纵向及横侧向通道构成, 自动油门(ATC)采用迎角保持。横侧向通道沿用常规着舰飞行控制结构设计, 纵向通道则由以内、中、外回路构成的升降舵通道与基于自适应模糊控制的襟翼直接升力通道并行构成。升降舵通道由内至外分别为姿态回路、下沉率(ḣ)回路及高度跟踪回路, 襟翼通道则以高度及下沉率误差作为控制输入。考虑到飞机状态、外界扰动及建模的不确定性, 引入模糊系统逼近时变的非线性飞机状态参量, 得到襟翼舵偏输出。模糊系统最优参数ϑfDLC*, ϑgDLC*由自适应律给出。考虑到襟翼与升降舵通道及副翼、方向舵通道存在交联力矩耦合, 利用线性插值方法得出解耦交联增益kδef, kδar。

|
| 图 1 控制架构 |
本节将给出应用于襟翼直接升力通道的自适应模糊算法, 并利用李雅普诺夫方法验证该算法引入后的非线性系统稳定性。
控制对象: 结合舰载机状态模型实际情况, 考虑襟翼通道输入量及输出量均为一维, 给出下述二阶非线性系统
|
(5) |
式中:f(x), g(x)为具有不确定性的非线性函数;u, y分别为系统输入及输出。
控制律设计: 考虑到非线性系统的不确定性, 利用模糊系统逼近f(x), g(x), 将控制律设计为

|
(6) |
式中: yc为控制指令; KT为闭环控制系统参数, 满足K=(kp, kd)T; E为响应误差向量, 满足E=(e, ė)T, e=yc-y=yc-x。
模糊系统设计: 运用乘积推理机、单值模糊器及中心平均解模糊器对f(x, ẋ), g(x, ẋ)构造模糊系统
步骤1 分别对x, ẋ定义模糊集合, 定义为M1l1, M2l2, l1=l2=1, 2, …, q, q为模糊集合数;
步骤2 根据步骤1构造的模糊集合, 运用q×q条IF-THEN模糊规则构造模糊系统, 得到模糊系统的
步骤3 定义模糊集Al1l2的中心值yfl1l2, 构造模糊系统的输出为
|
(7) |
式中: μM1l1(x), μM2l2(ẋ)为x, ẋ的隶属函数。
步骤4 由于中心值yfl1l2不能直接获得, 考虑构造包含所有yfl1l2的集合ϑf∈Rq×q。同时构造一个q×q维向量χ(x, ẋ), 使得其第l1l2个元素为
|
(8) |
由此可将(7)式改写为

|
(9) |
按上述步骤设计ĝ(x, ẋ|ϑg)模糊系统, 得到

|
(10) |

|
(11) |
式中: λl1l2(x, ẋ)为q×q维向量的第l1l2个元素, vM1l1(x), vM2l2(ẋ)为隶属函数。
自适应律设计: 构造的模糊向量χl1l2(x, ẋ), λl1l2(x, ẋ)由模糊规则给出。由于模型具备时变性, 且中心值集合ϑf, ϑg不能直接表达, 考虑利用自适应控制方法, 对ϑf, ϑg设计自适应律进行逼近。首先给出运用模糊控制器的闭环系统误差方程, 以向量形式表达为
|
(12) |
式中, 

|
(13) |
式中, P, Q均为正定矩阵; Γ的特征根实部为负。将自适应律设计为

|
(14) |

|
(15) |
式中, σ1, σ2为正。
稳定性证明: 首先定义最优参数ϑf*, ϑg*

|
(16) |

|
(17) |
式中, Θf, Θg为ϑf, ϑg的取值集合。将误差状态方程(12)式改写为
|
(18) |
式中, ε为最小逼近误差, 给出其表达形式
|
(19) |
为验证自适应律(14)~(15)式使闭环误差收敛, 定义李雅普诺夫函数

|
(20) |
代入自适应律(14)~(15)式及状态误差方程(18)推导可得

|
(21) |
式中, N=b[(ϑf-ϑf*)Tχ(x, ẋ)+(ϑg-ϑg*)Tλ(x, ẋ)u+ε]。由于最小逼近误差有界即|ε|≤εmax, 故存在充分小的ε使
本节将设计已解耦的舰载飞机着舰控制系统。利用第2节阐述的先进控制算法, 在纵向通道引入指令, 对升降舵通道常规控制方案及襟翼直接升力通道自适应模糊控制方案分别设计, 同时给出横侧向控制方案。
3.1 常规飞行控制方案设计在常规飞行控制方案中, 襟翼直接升力通道并未引入。纵向与横侧向已解耦, 其中纵向通道分为内、中、外3个回路。除内环姿态跟踪与外环航迹跟踪外, 还将引入基于ḣ指令的中间回路。
1) 纵向通道常规控制方案
由内回路至外回路分别进行设计。内回路引入俯仰角速率反馈, 由升降舵经一阶软化环节直接改变飞机姿态, 表达为

|
(22) |
式中: kδe, Gδe为升降舵控制增益及一阶软化环节, qc, kpq分别为俯仰角速率指令及控制增益。俯仰角速率指令由引入ḣ指令及反馈的中间回路给出, 其表达形式为

|
(23) |
式中: kpḣ, kdḣ为下沉率控制比例、微分系数, ḣc为下沉率指令, 由引入高度指令及反馈的外回路表示为

|
(24) |
式中: kph, kih, kdh, kddh为高度控制比例、积分、微分、二阶微分系数; hc为高度指令。除航迹跟踪外, 纵向通道亦包含保持迎角恒定的自动油门(ATC), 由参考文献[11]给出。
2) 横侧向通道常规控制方案
横侧向通道作用为实现下滑道跟踪的快速对中, 同时实现滚转与偏航控制的解耦。控制律设计为

|
(25) |

|
(26) |
式中, Gδr, Gδa为一阶软化环节, kϕ, kψ, kp, kr, kβ, kδar为各通道控制参数。
3.2 自适应模糊直接力控制方案设计在纵向通道经典控制方案的基础上, 采用并行架构设计思路, 调用襟翼通道控制权限, 构成直接升力控制结构, 并利用第2节阐述的自适应模糊控制算法, 逼近襟翼通道飞机模型及外界干扰引入的不确定性。
控制对象: 将襟翼通道的近似二阶非线性模型表示为

|
(27) |
式中: fDLC(h), gDLC(h)为具有襟翼通道不确定性的非线性函数; δf为襟翼通道输入。
模糊系统设计: 考虑fDLC(h), gDLC(h)具有未知不确定性, 按(7)~(11)式步骤, 运用q×q条IF-THEN模糊规则, 分别构造模糊系统

|
(28) |

|
(29) |
式中: ϑfDLC, ϑgDLC为构造的模糊系统中心值的取值集合, 由自适应控制方案确定; χ(h, ḣ), λ(h, ḣ)为构造的q×q维向量, 向量中第l1l2个元素满足
|
(30) |
|
(31) |
各变量含义已在第2节给出。
控制律设计: 首先构造误差向量

|
(32) |
控制律设计为

|
(33) |
式中: Kδf为控制系统参数向量, 表达为Kδf=(kpδf, kdδf)T; 由于舰载飞机着舰需沿直线航迹稳定下滑, 下滑阶段ḧc=0。由此可以得到以向量形式表达的闭环系统误差状态方程

|
(34) |
式中, 

自适应律设计: 构造李雅普诺夫方程

|
(35) |
式中, P, Q均为正定矩阵。将自适应律设计为

|
(36) |

|
(37) |
式中, σ1, σ2为正。定义李雅普诺夫函数
|
(38) |
式中, 最优参数ϑf*, ϑg*定义为

|
(39) |

|
(40) |
式中, ΘfDLC, ΘgDLC为ϑfDLC, ϑgDLC的取值集合。根据(21)式推导结论, 即可验证按该自适应律逼近的模糊系统控制律在逼近误差取值足够小的前提下, 系统误差能够收敛稳定。
4 仿真验证及分析本节将对前文设计的自适应模糊直接力着舰纵向控制进行仿真验证, 设置引入舰艉气流干扰的仿真环境, 并给出仿真参数。将引入襟翼直接升力通道前后的着舰控制效果进行对比, 给出分析结论。
4.1 常规飞行控制方案设计仿真环境包括甲板运动及舰艉气流模型的建立, 同时给出着舰参数及控制参数值。样例飞机模型参数根据文献[12]给出。
甲板运动设置: 考虑到航母甲板质量大、飞机着舰时间短暂, 由海浪和风引起的甲板运动可以看作平稳随机过程[12]。甲板运动信息的采集通常通过对海浪和风的数据信息采集建立起甲板运动的功率谱密度函数, 然后根据建立的功率谱密度曲线简化获得成形滤波器的传递函数。本文将甲板运动信息表达为白噪声与功率谱相对应的成形滤波器的乘积, 给出在纵向通道中甲板升沉和俯仰角与白噪声的传递函数

|
(41) |

|
(42) |
式中: NW为白噪声; hs及θs分别为甲板升沉及俯仰角。
舰艉气流设置: 舰艉气流主要由自由大气紊流分量、艉流稳态分量、艉流周期性分量以及艉流随机分量叠加组成, 其中艉流稳态分量为着舰前8秒引入的扰动, 因垂向分量变化较为剧烈, 在着舰末端对舰载飞机高度跟踪易构成较大影响[13]。对艉流稳态分量模型进行曲线数值拟合, 可得到模型表达式, 即

|
(43) |
式中, u(t), w(t)为艉流稳态分量, 其余分量模型由文献[14]给出。
着舰参数设置: 样例飞机按平飞至稳定下滑航迹进行数值仿真, 初始距舰6 500 m, 高度360 m, 下滑段航迹角指令为3.5°。初始迎角8.38°, 初始速度70 m/s, 襟翼配平角度为34°, 升降舵配平角度为-5°, 海况设置为5级, 有关海况数据在文献[14]中给出。
控制参数设置: 纵向通道由升降舵控制通道与襟翼自适应模糊直接升力控制通道并行构成。升降舵通道参数为

|
在襟翼直接升力控制通道中, 设定仿真初值f0(h, ḣ)=0.2, g0(h, ḣ)=3.8。自适应模糊控制参数设置为kpδf=2, kdδf=1, σ1=50, σ2=1, 

图 2至7给出了自适应模糊控制的直接升力控制方案、未调用襟翼直接升力通道的常规控制方案与文献[3]中给出的典型直接升力控制方案用于着舰闭环仿真的对比结果。根据仿真结果, 作出如下分析:

|
| 图 2 模糊自适应直接力控制方案着舰点蒙特卡洛仿真结果 |

|
| 图 3 常规控制方案着舰点蒙特卡洛仿真结果 |

|
| 图 4 平飞转下滑阶段3方案高度误差对比 |

|
| 图 5 引入雄鸡艉流后3种方案高度误差对比 |

|
| 图 6 平飞转下滑阶段常3种方案俯仰角速率对比 |

|
| 图 7 引入雄鸡艉流后3种方案俯仰角速率对比 |
1) 直接升力控制方案相比常规控制方案具有改善着舰效果的作用, 提高舰载飞机着舰精度。图 2至3给出了基于蒙特卡洛随机打靶仿真试验的不同方案着舰落点统计结果, 试验次数为各500次, 4条拦阻索位置如图所示。基于直接升力控制的500次随机试验中, 全部试验舰载机尾钩捕捉拦阻索, 着舰成功率为100%, 其中尾钩捕捉第一条拦阻索14次, 第三条1次, 第二条485次。根据着舰品质规范[3], 尾钩捕捉第二、三条拦阻索定义为着舰效果较好, 比例为97.2%。未引入自适应模糊直接升力通道的常规控制500次随机试验中, 有44次飞越第四条拦阻索导致着舰失败, 着舰成功率为91.2%。尾钩捕捉第二、三条拦阻索共279次, 判定为着舰效果较好的比例为55.8%。仿真结果表明, 引入襟翼直接升力通道的着舰控制更稳定, 着舰精度更高、品质更好, 抗随机干扰能力更强。
2) 基于自适应模糊控制方案的直接升力控制方案相比典型直接升力控制方案具有更强的干扰抑制能力, 同时直接升力方案相比常规控制方案具有更小的跟踪误差, 收敛速度更快。图 4至5则给出这三个阶段的高度误差对比结果。仿真结果表明, 在平飞转下滑阶段, 直接升力控制方案相比常规控制方案具有较小的高度跟踪误差, 且在下滑道跟踪时具备更快的收敛速度。引入雄鸡艉流后, 直接升力控制方案对舰艉气流的抑制作用相比常规控制方案也更明显。引入了自适应模糊控制方法的直接升力控制方案相比典型直接升力控制方案在抗垂风及舰艉气流抑制方面具备更大优势与更良好的控制效果, 高度误差减小的同时, 根据图 6至7给出了飞机平飞至下滑及引入舰艉气流2个过程俯仰角速率变化的对比曲线, 飞机飞行过程中角度变化更平缓, 姿态稳定性更高。
综上分析, 该自适应模糊直接升力控制方案相比未调用襟翼直接升力通道的常规控制, 跟踪效果更好、快速性更高, 在与典型直接升力控制方案的对比中, 对舰艉气流等外界干扰的抑制作用更好, 能够进一步提升航迹跟踪与姿态稳定效果, 应用于舰载飞机着舰控制中, 具备较为良好的应用前景。
5 结论本文针对舰载飞机着舰状态复杂、控制难度大的问题, 在传统纵向飞行控制中调用襟翼通道控制权限, 用于提供直接升力, 增大航迹跟踪回路带宽, 提升航迹跟踪快速性; 在襟翼直接升力通道设计自适应模糊先进控制方案, 利用模糊系统的逼近能力自适应逼近六自由度非线性飞机模型及着舰外界环境的复杂干扰带来的复杂不确定性, 数值仿真结果表明这种控制方案相比常规纵向飞行控制具备更好的控制效果。
由于甲板运动、舰艉气流等复杂干扰及飞机模型自身强烈非线性, 舰载飞机着舰过程的精确数学模型建立存在巨大困难, 同时舰载飞机着舰过程中针对航迹跟踪也具备更高的精度和快速性需求。本文通过理论推导及数值仿真验证, 进行基于蒙特卡洛随机方法的着舰点统计试验, 验证结果表明本文设计的自适应模糊直接升力控制系统能够实现对建模不确定项的自适应逼近, 提高着舰精度, 改善着舰效果。未来, 还将对样例飞机模型引入执行器或效应器故障, 展开基于该控制方案的舰载飞机容错控制能力研究。
| [1] | RAVI J, ABHISHEK S, SWATI S. Adaptive longitudinal control of UAVS with direct lift control[C]//Optimization of Dynamical Systems, 2016 |
| [2] | RONALD H. Analysis of the aircraft carrier landing task, pilot plus augmentation/automation[C]//2nd IFAC Conference on Cyber-Physical and Human-Systems, 2019 |
| [3] | JAMES W. Project magic carpet: advanced controls and displays for precision carrier landings[C]//54th AIAA Aerospace Sciences Meeting, 2016 |
| [4] | ZHEN Ziyang, TAO Gang, JIANG Shuoying. An adaptive control scheme for carrier landing of UAV[C]//37th Chinese Control Conference, Wuhan, 2018 |
| [5] | DOU Rui, DUAN Haibin. Lévy flight based pigeon-inspired optimization for control parameters optimization in automatic carrier landing system[J]. Aerospace Science and Technology, 2017, 61: 11-20. DOI:10.1016/j.ast.2016.11.012 |
| [6] | ZHEN Ziyang, PENG Miao, XUE Yixuan. Robust preview control and autoregressive prediction for aircraft automatic carrier landing[J]. IEEE Access, 2019, 7: 273-283. |
| [7] | ZHEN Ziyang, TAO Gang, YU Chaojun. A multivariable adaptive control scheme for automatic carrier landing of UAV[J]. Aerospace Science and Technology, 2019, 92: 714-721. DOI:10.1016/j.ast.2019.06.030 |
| [8] | YOO B K, Ham W C. Adaptive control of robot manipulator using fuzzy compensator[J]. IEEE Trans on Fuzzy Systems, 2000, 8(2): 186-199. DOI:10.1109/91.842152 |
| [9] | ZHEN Ziyang, JIANG Shuoying. Automatic carrier landing control for unmanned aerial vehicles based on preview control and particle filtering[J]. Aerospace Science and Technology, 2018, 81: 99-107. DOI:10.1016/j.ast.2018.07.039 |
| [10] | BRADFORD E G, DAVID B F. CFD analysis of the F/A-18E super hornet during aircraft carrier landing high-lift aerodynamic conditions[C]//54th AIAA Aerospace Sciences Meeting, 2016 |
| [11] | ZHEN Ziyang, YU Chaojun, JIANG Shuoying. Adaptive super-twisting control for automatic carrier landing of aircraft[J]. IEEE Trans on Aerospace and Electronic Systems, 2019, 56(2): 984-997. |
| [12] | ZHEN Ziyang, JIANG Ju, WANG Xinhua. Modeling, control design, and influence analysis of catapult-assisted take-off process for carrier-based aircrafts[J]. Journal of Aerospace Engineering, 2018, 232(13): 2527-2540. |
| [13] | ZHEN Ziyang, JIANG Shuoying, JIANG Ju. Preview control and particle filtering for automatic carrier landing[J]. IEEE Trans on Aerospace and Electronic Systems, 2018, 54(6): 2662-2674. DOI:10.1109/TAES.2018.2826398 |
| [14] | ZHEN Ziyang, JIANG Ju, WANG Xinhua. Information fusion based optimal attitude control for large civil aircraft system[J]. ISA Transactions, 2015, 55: 81-91. DOI:10.1016/j.isatra.2014.09.017 |
