

太阳帆航天器在进行周期轨道转移任务中,利用限制性三体模型并结合太阳光压(CR3BP+SRP)的影响越来越受到关注[1-2]。太阳帆可看作是一种航天器推进装置,光子反射使卫星加速,加速度很小,但由于任务周期相对较长,影响较大。
航天器受到2个天体引力而相互平衡的位置,被称为平动点[3]。相应的,在平动点周围存在着周期轨道,例如:Lyapunov、Halo和Lissajous轨道,可看作是天文观测或进行科学实验等任务的良好平台,目前很多国家已经发射了多个卫星进行在轨验证等任务[4-5]。
美国航空航天局(NASA)先后独立发射了6个探测器,分别为Wind[6]、ACE[6]、WMAP[7]、Genesis[8]、ARTEMIS[9]和DSCOVR[10]。
欧洲空间局(ESA)前期与美国航空航天局合作发射了3个探测器(ISEE-3[11]、SOHO[6]和Herschel[12]),于2009年后又独立发射了3个探测器(Planck[13]、Gaia[14]和LISA Pathfinder[15])。
中国国家航天局(CNSA)也于2010年和2014年分别发射嫦娥二号[16]和嫦娥五号-T1[17]。
针对3类周期轨道,Lissajous轨道相比较另两类Lyapunov轨道和Halo轨道具有更多的形状和选择,适合航天任务的需求。然而,围绕共线平动点的(准)周期轨道相关动力学是不稳定的,要使航天器转移在附近需要有效的转移方法。
2010年,日本宇航局(JAXA)发射了Ikaros[18]号太阳帆航天器,标志着第一个真正意义上的太阳帆航天器的诞生。其面积为14 m×14 x(196 m2)。动力完全来源于太阳光压,并实现了飞掠金星的任务,具有标志性和里程碑意义。
Colombo[19]、Euler[20]、Breakwell[21]和Farquhar[22]最早对平动点周期轨道转移进行了研究,并将其应用在了ISEE-3任务中。但其主要是利用动力学原理,利用推力等方式进行轨道转移。后续,McInnes等[23]研究了太阳光压会对平动点位置产生影响,Farrés等[24]利用上面思路,设计了Halo轨道的轨道转移。在此基础上,Soldini[25]、Jorba[26]和Farrés等[27]也研究了Lissajous轨道的转移问题,但其平动点的位置转移仅停留在平面上,且未考虑钟角及光压因子对转移策略的影响。目前,国内的很多学者也进行了太阳帆的研究,如:清华大学宝音贺西团队研究了利用太阳帆进行周期轨道转移[28]和轨道保持[29],中科院的罗超等[30]研究了太阳帆航天器的轨道动力学和轨道控制等问题,还有张辉[31]和朱敏[32]也进行了太阳帆影响下的平动点移动研究,不过只考虑了共线平动点在不同光压因子影响下的变化情况。西工大孙冲等[33]研究了太阳帆推力机动的轨道设计问题。
基于上述研究情况的不足,本文考虑了大面质比航天器的光压因子、锥角和钟角三者共同作用下的日地L2平动点三维变化情况,实现了航天器沿着不稳定流形逃逸初始Lissajous轨道,改变帆板角度,利用位移后的平动点的稳定流形,转移到新Lissajous轨道,完成轨道转移。
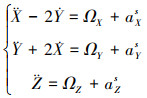
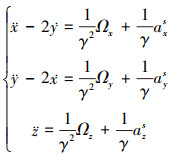
1 太阳帆航天器的动力学模型本文采用的模型是限制性三体模型加上太阳光压模型(CR3BP+SRP),即太阳帆航天器只考虑太阳和地球的引力以及太阳光压力,其动力学公式为:
|
(1) |
式中:

|
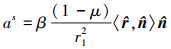
r1和r2为航天器与太阳和地球的距离。aXs, aYs和aZs是太阳光压力所产生的加速度, 如果为零, 则为传统的限制性三体模型。太阳光压力产生的加速度可由公式(2)计算:
|
(2) |
式中:


|
| 图 1 太阳帆航天器角度示意图 |

|
| 图 2 太阳帆在日地系统下的示意图 |
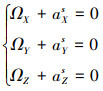
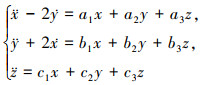
若航天器在平动点上, 则理论上速度和加速度均为零。则公式(1)则可写成
|
(3) |
在公式(3)中, 所求得的解与太阳帆板的角度和光压因子有关, 故5个平动点不再是位置固定不动, 拓展成5个“人工”平动点家族[15]。目前, 所有发射到周期轨道的卫星, 均工作在平动点L1和L2附近的周期轨道, 故本文仅研究人工平动点SL2及其周边周期轨道的情况。其“人工”平动点家族如图 3所示, 图中的每一个点均对应着一个特定的光压因子、锥角和钟角。图 3a)是SL2点的三维图形, 图 3b)为其X-Y平面图。可以看出, 若保持光压因子不变, 随着锥角和钟角的变化, 形成了一个封闭的球面。若改变光压因子, 随着因子数值增大而球面扩大。平动点位置的改变, 可实现逃逸的探测器会沿着稳定流形至新的Lissajous轨道。

|
| 图 3 SL2平动点 |
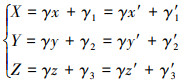
为了更好地分析太阳帆航天器在“人工”平动点附近的运动, 本文引进了图 4的坐标系。在日地坐标系下,图中星号为日地限制性三体问题中的L2点, SL2(γ1, γ2, γ3)以及SL'2(γ'1, γ'2, γ'3)分别代表着改变光压参数前后的平动点位置(其均对应着特定的光压因子、锥角和钟角)。则运动学公式为
|
(4) |

|
| 图 4 平动点位置及坐标系示意图 |
式中:(X, Y, Z)为日地旋转坐标系下的位置;(γ1, γ2, γ3)是给定光压因子、锥角和钟角下的SL2平动点;(x, y, z)为以平动点为中心坐标系下的位置;γ是一个比例因子, 可以任意选择,本文选取的值为0.01, 因为这个值很贴近平动点L2到地球的距离。
将公式(4)带到入公式(1)中, 则动力学公式变为
|
(5) |
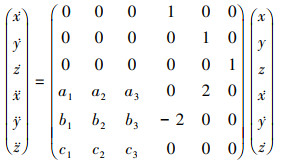
平动点附近动力学分析可以利用线性化后的公式(5)来进行分析。经过复杂的代数计算得到动力学公式为
|
(6) |
其中系数ai, bi和ci可以用光压因子、锥角、钟角, 平动点等参数表达, 其矩阵等式为
|
(7) |
求解公式(6)的线性解, 分成2种情况:
情况1: x(t)=eλt, y(t)=keλt, z(t)=eλt
情况2: x(t)=eλt, y(t)=keλt, z(t)=eλt
分别带入公式(6)中, 得到:
情况1: 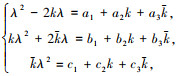
情况2: 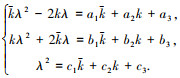
对公式(7)中矩阵进行求解, 将会得到6个根。通常情况下有2个实根λ1(>0)和λ2(< 0), 以及另外2对共轭复根:

|
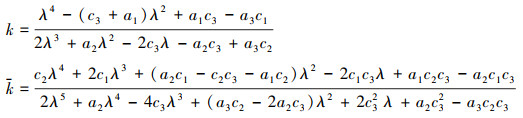
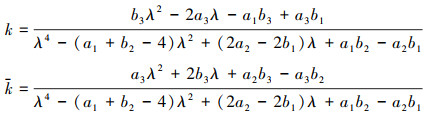
最终, 我们可以求得2种情况下的k和k值。
情况1
|
情况2
|
将情况1和2得到的线性解带入公式(6)中, 则得到其线性解为
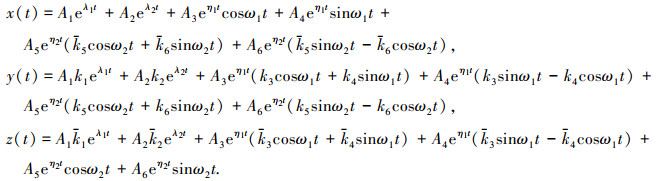
|
(8) |
进一步简化, 得到

|
(9) |
公式(9)中的各项参数均由公式(8)得到, 其中Au对应着不稳定流形, 因为λ1>0, 指数项会随着时间的增大趋近于无限大, 同理, As对应着稳定流形。Ax和Az代表着轨道平面内的幅值以及垂直轨道方向的幅值, φ1和ϕ1代表着轨道内的相位角。
3 线性近似的精度分析由于模型进行了线性化处理, 故需要考虑其精度是否满足要求。本文计算了剩余加速度RA, 其定义为线性化处理前后(即公式(1)和公式(6))的加速度之差范数, 如公式(10)所示

|
(10) |
公式(10)中, (x, y, z)代表线性化前的状态量, (xL, yL, zL)代表线性后的状态量。
本文计算了, 在不同Lissajous轨道X轴幅值情况下, 剩余加速度RA的最大值和平均值, 如图 5所示。从图中观察可以得出:①当Lissajous轨道X轴幅值较小, 则其剩余加速度值越小。②随着Lissajous轨道X轴幅值增大, 其Y轴剩余加速度RA也逐渐增大, 但其量级为10-9 km/s2。由上述可以看出, 量级很小, 线性近似是满足精度要求的。

|
| 图 5 在不同Lissajous轨道X轴幅值情况下,剩余加速度RA的最大和平均值 |
本节主要介绍如何利用太阳帆板进行Lissajous轨道的转移。设计流程如下:
1) 设定初始参数:给定初始的锥角α1、钟角δ1和光压因子β1以及Lissajous轨道参数A1…A6。
2) 利用公式(3)计算得到初始平动点(γ1, γ2, γ3), 以及求出公式(7)中矩阵多项式的解:λ1到λ6。
3) 将结果带入到公式(8)中, 算出初始Lissajous轨道以及不稳定流形。
4) 从航天器沿着不稳定流形逃逸开始设定为t0=0。同时给定末端的锥角α2、钟角δ2和光压因子β2, 计算终端平动点值和求解多项式的解, 并得到A1…A6。
5) 若A1≠0, 则设置t=t+Δt, 返回到步骤4, 直到A1=0或超过时间的最大值t>tmax。
6) 若A1=0, 通过A2到A6得到稳定流形及目标Lissajous轨道。
假设初始的锥角α1=0、钟角δ1=π/2和光压因子β1=0.03, 则得到其初始Lissajous轨道和不稳定流形如图 6所示。

|
| 图 6 初始Lissajous轨道和不稳定流形 |
图 6中, 圆柱体为初始Lissajous轨道, 偏离圆柱体的轨道为其不稳定流形,“*”点为“人工”平动点SL2(后类似图同理)。
4.1 改变锥角的数值仿真保持钟角δ2=π/2和光压因子β2=0.03不变, 锥角从0°改成α2=π/6, 则不稳定幅值A1与探测器在不稳定流形转移的时间关系t如图 7所示。

|
| 图 7 不稳定幅值与转移时间 |
从图 7中, 可以看出大约时间在1.59时, 不稳定幅值A1=0, 则在此刻转移太阳帆板角度, 锥角从0到π/6, 探测器则会沿着稳定流形, 转移到新形成的平动点附近的周期轨道, 如图 8所示。

|
| 图 8 改变锥角轨道转移 |
表 2为太阳帆板改变锥角前后的光压参数、“人工”平动点位置以及周期轨道X和Z方向的幅值对比图。如表 2所示, 保持钟角(δ=π/2)和光压因子(β=0.03)不变, 锥角从0°变为π/6, SL2“人工”平动点发生了移动, 由于δ=π/2, 导致其移动仅仅在X-Y平面, 对Z平面(γ3)没有影响, 终端Lissajous轨道的X和Z方向的幅值也发生了变化。
| 初始 | 终端 | ||
| α1 | 0 | α2 | π/6 |
| δ1 | π/2 | δ2 | π/2 |
| β1 | 0.03 | β2 | 0.03 |
| γ1 | -1.007 6 | γ'1 | -1.008 0 |
| γ2 | 0 | γ'2 | 0.002 1 |
| γ3 | 0 | γ'3 | 0 |
| Ax | 0.041 7 | A′x | 0.021 2 |
| Az | 0.166 7 | A′z | 0.183 8 |
根据图 1所示, 若锥角α=0, 可以发现无论如何转移钟角, 其光压力、以及“人工”平动点均不会发生变化。为验证钟角对末端平动点及Lissajous轨道的影响, 故设置锥角为π/4和光压因子β=0.03, 初始和终端的钟角分别为π/2和π。其初始Lissajous轨道和不稳定流形如图 9所示, 不稳定幅值A1与探测器在不稳定流形转移的时间关系t如图 10所示。

|
| 图 9 初始Lissajous轨道和不稳定流形 |

|
| 图 10 不稳定幅值与转移时间 |
从图 10中, 可以发现当转移时间大约在0.3左右时, 不稳定幅值为零, 则在此刻转移钟角可实现转移到新形成的平动点附近的周期轨道。如图 11所示, 图形的解释说明与表 1相同。

|
| 图 11 改变钟角的轨道转移 |
图 11为改变钟角前后的Lissajous轨道以及不稳定流形的仿真图。
如表 3所示,保持锥角(δ=π/4)和光压因子(β=0.03)不变, 钟角从π/2变为π, SL2“人工”平动点不仅仅在X-Y平面, 对Z方向(γ3)也有影响, 同样终端的Lissajous轨道的X和Z方向的幅值也发生了变化。
| 初始 | 终端 | ||
| α1 | π/4 | α2 | π/4 |
| δ1 | π/2 | δ2 | π |
| β1 | 0.03 | β2 | 0.03 |
| γ1 | -1.008 6 | γ'1 | -1.008 8 |
| γ2 | 0.002 5 | γ'2 | 0 |
| γ3 | 0 | γ'3 | -0.002 0 |
| Ax | 0.041 7 | A′x | 0.011 8 |
| Az | 0.166 7 | A′z | 0.136 6 |
保持锥角α=0°, 钟角δ=π/2不变, 初始和末端光压因子分别为0.03和0.02。初始Lissajous和不稳定流形与图 6一样。不稳定幅值A1与探测器在不稳定流形转移的时间关系t如图 12a)所示。

|
| 图 12 不稳定流形及转移轨道 |
图 12和表 4展示的是改变光压因子前后的Lissajous轨道、不变流形以及各项参数。从图 5中发现改变光压因子对平动点位移的影响要比锥角和钟角大, 可以为更多任务提供可行性。
| 初始 | 终端 | ||
| α1 | 0 | α2 | 0 |
| δ1 | π/2 | δ2 | π/2 |
| β1 | 0.03 | β2 | 0.02 |
| γ1 | -1.007 6 | γ'1 | -1.008 3 |
| γ2 | 0 | γ'2 | 0 |
| γ3 | 0 | γ'3 | 0 |
| Ax | 0.041 7 | A′x | 0.048 7 |
| Az | 0.166 7 | A′z | 0.183 9 |
本文首次利用了三维人工SL2平动点实现了拟周期Lissajous轨道的异宿转移。其中, 分别考虑了改变太阳帆锥角、钟角和光压因子对转移轨道的影响, 且有如下结论:
1) 当保持钟角δ=π/2和光压因子β=0.03不变, 改变太阳帆锥角可以实现拟周期Lissajous轨道的转移, 且平动点仅在XY平面内发生位移。
2) 若锥角α=0, 可以发现无论如何转移钟角, 其光压力、以及“人工”平动点均不会发生变化。
3) 若锥角α=π/4, 光压因子β=0.03, 则改变太阳帆钟角也可以实现轨道转移, 但其平动点在Z轴方向上发生了位移, 且转移后的拟周期Lissajous轨道也有变化。
4) 相比较久改变太阳帆角度, 改变太阳帆光压因子β会更加影响转移以及目标拟周期Lissajous轨道。
上述结论, 可以为未来太阳帆航天器实现轨道保持或者日地平动点周期轨道的转移以及躲避地球阴影等方面提供了参考。
| [1] | MCINNES C R. Solar Sailing:Technology, Dynamics and Mission Applications[J]. Journal of Guidance Control & Dynamics, 2004, 23(4): 768-768. |
| [2] | MCINNES C R. Solar Sail Mission Applications for Non-Keplerian Orbits[J]. Acta Astronautica, 1999, 45(4/5/6/7/8/9): 567-575. |
| [3] | SZEBEHELY V, SINGER S F. Theory of Orbits:The Restricted Problem of Three Bodies[J]. Physics Today, 1968, 21(11): 89-91. |
| [4] | SHIROBOKOV M, TROFIMOV S, OVCHINNIKOV M. Survey of Station-Keeping Techniques for Libration Point Orbits[J]. Journal of Guidance, Control, and Dynamics, 2017, 16: 1-21. |
| [5] |
淡雪, 岳晓奎. 基于自适应积分的太阳同步轨道发射优化设计[J]. 西北工业大学学报, 2013, 31(5): 701-705.
DAN Xue, YUE Xiaokui. Optimization of Launch Trajectory for SSD(Sun Synchroas Orbit) Based on Adaptive Transfer Orbit[J]. Journal of Northwestern Polytechnical University, 2013, 31(5): 701-705. (in Chinese) |
| [6] | ROBERTS C E. Long Term Missions at the Sun-Earth Libration Point L1: ACE, SOHO, and WIND[C]//AAS/AIAA Astrodynamics Specialist Conference, Girdwood, Alaska, 2011 |
| [7] | SPERGEL D N, BEAN R, DORÉ O, et al. Three-Year Wilkinson Microwave Anisotropy Probe(WMAP) Observations:Implications for Cosmology[J]. The Astrophysical Journal Supplement Series, 2007, 170(2): 377. DOI:10.1086/513700 |
| [8] | WILLIAMS K E, LEWIS G D, WILSON R S, et al. Genesis Earth Return:Refined Strategies and Flight Experience[J]. Advances in the Astronautical Sciences, 2005, 120: 249-268. |
| [9] | FOLTA D C, PAVLAK T A, HAAPALA A F, et al. Earth-Moon Libration Point Orbit Stationkeeping:Theory, Modeling, and Operations[J]. Acta Astronautica, 2014, 94(1): 421-433. DOI:10.1016/j.actaastro.2013.01.022 |
| [10] | ROBERTS C, CASE S, REAGOSO J. Lissajous Orbit Control for the Deep Space Climate Observatory Sun-Earth L1 Libration Point Mission[C]//AAS 15-611, AAS/AIAA Astorodynamics Specialist Conference, Vail, Colorado, 2015 |
| [11] | FARQUHAR R. The flight of ISEE-3/ICE-Origins, Mission History, and a Legacy[C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit, 1998: 4464 |
| [12] | FRAYER D T. Tools for the Herschel Space Observatory:observation Planning and Data Processing[J]. American Astromilical Society Meeting Abstracts, Bulletin of the American Astronomical Society, 2007, 39: 108. |
| [13] | ADAM R, ADE P A R, AGHANIM N, et al. Planck 2015 Results-I. Overview of Products and Scientific Results[J]. Astronomy & Astrophysics, 2016, 594: A1. |
| [14] | RENK F, LANDGRAF M. Gaia: Trajectory Design with Tightening Constraints[C]//Proceedings of the 24th International Symposium on Space Flight Mechanics, Laurel, MD, 2014 |
| [15] | RUDOLPH A. LISA Pathfinder Launch and Early Operations Phase-in-Orbit Experience[C]//14th International Conference on Space Operations, 2016: 2412 |
| [16] | DONG G, FAN M, LI P, et al. Chang'E-2 Lunar Probe Orbit Determination and Support[J]. J Astron, 2013, 34(4): 457-463. |
| [17] | LI F, YE M, YAN J, et al. A Simulation of the Four-Way Lunar Lander-Orbiter Tracking Mode for the Chang'E-5 Mission[J]. Advances in Space Research, 2016, 57(11): 2376-2384. DOI:10.1016/j.asr.2016.03.007 |
| [18] | TSUDA Y, MORI O, FUNASE R, et al. Flight Status of IKAROS Deep Space Solar Sail Demonstrator[J]. Acta Astronautica, 2011, 69(9/10): 833-840. |
| [19] | COLOMBO G. The Stabilization of an Artificial Satellite at the Inferior Conjunction Point of the Earth-Moon System[J]. Journal of the Astronautical Sciences, 2001, 6(1): 213. |
| [20] | EULER E A, YU E Y. Optimal Station-Keeping at Collinear Points[J]. Journal of Spacecraft and Rockets, 1971, 8(5): 513-516. DOI:10.2514/3.59686 |
| [21] | BREAKWELL J V. Investigation of Halo Satellite Orbit Control[R]. NASA, CA, Tech-Rep, CR-132850, 1973 |
| [22] | FARQUHAR R W. Station-Keeping in the Vicinity of Collinear Libration Points with an Application to a Lunar Communications Problem[C]//AAS Science and Technolgy Series: Space Fliyht Mechanics Specialist Symposium, 1966, 11: 519-535 |
| [23] | MCINNES C R, MCDONALD A J C, SIMMONS J F L, et al. Solar Sail Parking in Restricted Three-Body Systems[J]. Journal of Guidance Control & Dynamics, 2012, 17(2): 399-406. |
| [24] | FARRÉS A, ÀNGEL Jorba. Artificial Equilibria in the RTBP for a Solar Sail and Applications[M]. Astrodynamics Network AstroNet-Ⅱ. 2016 |
| [25] | SOLDINI S, MASDEMONT J J, GÓMEZ G. Dynamics of Solar Radiation Pressure-Assisted Maneuvers between Lissajous Orbits[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(4): 769-793. DOI:10.2514/1.G003725 |
| [26] | JORBA-CUSCÓ M, FARRÉS A, JORBA À. On the Stabilizing Effect of Solar Radiation Pressure in the Earth-Moon System[J]. Advances in Space Research, 2020, 23(7): 406-410. |
| [27] | FARRÉS A, HEILIGERS J, MIGUEL N. Road Map to L4/L5 with a Solar Sail[J]. Aerospace Science and Technology, 2019, 95: 105458. DOI:10.1016/j.ast.2019.105458 |
| [28] | WANG W, BAOYIN H, MENGALI G, et al. Solar Sail Cooperative Formation Flying around L2-Type Artificial Equilibrium Points[J]. Acta Astronautica, 2020, 169: 224-239. DOI:10.1016/j.actaastro.2019.10.028 |
| [29] | GUZZETTI D, SOOD R, CHAPPAZ L, et al. Stationkeeping Analysis for Solar Sailing the L4 Region of Binary Asteroid Systems[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(6): 1306-1318. DOI:10.2514/1.G003994 |
| [30] |
罗超, 郑建华, 高东. 太阳帆航天器的轨道动力学和轨道控制研究[J]. 宇航学报, 2009, 30(6): 2111-2117.
LUO Chao, ZHENG Jianhun, GAO Dong. Study on Orhit Dynamics and Control of Sorlar-Sail Spacecraft[J]. Journal of Astronautics, 2009, 30(6): 2111-2117. (in Chinese) |
| [31] |
张辉.太阳帆航天器轨道动力学与控制研究[D].合肥: 中国科学技术大学, 2014 ZHANG Hui. Orbit Dynamics and Control of Solar Sail Spacecraft[D]. Hefei: University of Science and Technology of China, 2014(in Chinese) |
| [32] |
朱敏.太阳帆航天器动力学与控制研究[D].合肥: 中国科学技术大学, 2016 ZHU Min. Dynamics and Control of Solar Sail Spacecraft[D]. Hefei: University of Science and Technogy of China, 2016(in Chinese) |
| [33] |
孙冲, 袁建平, 方群, 等. 采用虚拟引力场的太阳帆/电推进混合推力机动轨道设计[J]. 西北工业大学学报, 2018, 36(4): 618-626.
SUN Chong, YUAN Jianping, FANG Qun, et al. Hybrid Lon Thrust Propulsion Trajectory Design and Optimization Using Virtual Aravity Method[J]. Journal of Northwestern Polytecnical University, 2018, 36(4): 618-626. (in Chinese) |
