

目前,有源噪声控制(active noise control, ANC)已发展成为一种重要的噪声控制手段,主要针对低频噪声[1]。传统的ANC系统为集中式系统,考虑所有次级源到所有误差传感器之间的次级通路传递函数。对于大空间降噪,需要布置足够多的次级声源和误差传感器,此时的ANC系统不可避免地成为多通道系统[2]。随着通道数的增多,算法的运算复杂度随之增加,系统的稳定性变差。
为了应对大规模ANC系统运算复杂度剧增的问题,研究者们开始考虑集中式以外的系统结构及算法。Elliott首先提出了分布式ANC系统,系统中包含多个处理器,且它们之间不交换任何局部信息[3]。该系统的主要优势在于将运算量分配到多个处理器,降低了系统整体负担。George等基于同样的设想,每个处理器只接受对应的误差信号,并使用粒子群算法对非线性控制系统进行训练,能够改善性能曲面的局部极值问题[4]。Leboucher等在正弦扰动的自适应反馈分布式控制下,由小增益定理和奈奎斯特稳定性判据,推导出系统全局稳定条件,这些条件与次级声源和误差传感器的几何布局有关[5]。
近年来,出现了在声传感器网络上实现ANC的方法。在每个节点上采集和生成信号,同时将运算负担分配到每个节点,从而使系统更加灵活。Ferrer等人基于分布式多误差滤波-x最小均方(distributed multiple error filtered-x least mean square, DME-FxLMS)算法,利用声传感器网络实现了ANC系统[6]。网络中采用递增协作模式,所有节点按顺序形成环形拓扑结构。当节点中的通信没有约束时,可以获得与集中式系统相同的性能。之后,Ferrer等在此基础上又提出了分布式滤波-x仿射投影(distributed filtered-x affine projection, DFxAP)算法以提高收敛速度,仿真结果表明,其性能在收敛速度和降噪量上要好于DME-FxLMS算法[7]。Antonanzas通过对次级通路传递函数频域矩阵的分析,确定含有声耦合的节点,从而简化分布式网络结构,降低了系统的运算复杂度[8]。Song等利用扩散协作模式实现了分布式ANC系统,每个节点与其所有邻居节点进行协作通信,对传感器网络稳定性要求降低[9]。Kukde等利用扩散方案有效地消除ANC系统中的非线性的噪声,并降低了运算复杂度[10]。上述基于扩散模式的分布式算法强调了相对于集中式系统的优势,但是并没有对算法的特性进行理论分析。
本文由ANC系统代价函数出发,推导了基于扩散模式的分布式FxLMS算法,该算法为现有算法的一般模式。通过对声传感器网络的整体考虑,在平均及均方意义上分析了算法的收敛性能,计算机仿真证明理论结果能够正确反映系统的性能。最后比较了集中式FxLMS、分布式FxLMS和无合作式FxLMS 3种算法在同一噪声环境下的性能,验证了在运算量降低的情况下,分布式算法能够达到与集中式算法一致的降噪效果。该算法为大规模ANC提供了技术手段。
1 算法表达设如图 1所示的声传感器网络中有K个节点。为了简单起见,假设每个节点含有1个误差传感器、1个次级声源以及用于运算和通信的处理器。当节点k和节点l具有通信链接时, 在图中以实线连接, 称节点l与节点k互为邻居节点, 表示为l∈Nk(k∈Nl)。其中Nk为节点k的邻居节点集合。

|
| 图 1 分布式ANC系统 |
第k个节点误差传感器接收到的误差信号为

|
(1) |
式中:dk为n时刻的期望信号; sk为n时刻次级声源通过次级通路后产生的抵消信号。
由最小均方误差准则选取ANC系统的代价函数

|
(2) |
对于集中式系统来说, 假设系统中有I个参考传声器、J个次级声源、K个误差传感器, 直接由最速下降法原理可以获得权系数的递推公式[1]

|
(3) |
式中:wij(n)为n时刻第i个参考信号与第j个次级声源之间的L×1阶权系数; rijk(n)为n时刻第i个参考信号经过次级通路hjk滤波后形成的L×1阶滤波-x信号; μ为步长参数。
将权系数递推公式推广到整个系统, 有

|
式中
|
|
由(3)式可以看出, 对于集中式ANC系统, 单个权系数的求解需要全部误差信号的信息。
最优权系数由(5)式给出

|
(5) |
式中

|
(6) |

|
(7) |
分别为rk(n)的IJL×IJL阶自相关矩阵和rk(n)与d(n)的IJL阶互相关列向量, 且Rk为正定对称矩阵。
在声传感器网络中, 由于节点k只能与它的邻居节点通信, 定义其局部目标函数为

|
(8) |
式中,cl, k为融合参数, 有
用定义的局部目标函数来表示全局目标函数

|
(9) |
对Jlloc(w)进行泰勒展开可得

|
(10) |
式中:‖w-w0‖Γ2表示w-w0加权二范数的平方; 
将(8)式和(10)式代入(9)式可得

|
(10) |
将目标函数依据节点k的邻居节点集合进行局部化, 有

|
(12) |
为了更加有效地表达目标函数, 用bl, kI代替Γ[11]。则(12)式变为

|
(13) |
对(13)式中的目标函数运用最速下降法原理, 可以得到

|
(14) |
式中, wk(n)表示节点k在n时刻的IKL×1阶权系数。
将(14)式分为2步, 有

|
(15) |

|
(16) |
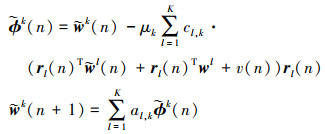
(16) 式需要最优权系数w0的信息, 这显然是不实际的。在进行(16)式的迭代之前, 所有节点都完成了(15)式的计算。为了在节点k权系数的估计中使用到邻居节点的权系数信息, 在(16)式中用ϕl(n)代替w0。ϕk(n)比wk(n)更接近于最优权系数, 则用ϕk(n)代替wk(n)。(16)式进一步变为

|
(17) |
定义

|
(18) |
由以上定义, 有
将(18)式代入(16)式, 即得到所谓的迭代后融合(adapt-then-combine, ATC)策略
|
(19) |
cl, k和al, k的定义可以引申到整个网络, 有

|
(20) |
注意当节点k和节点l没有通信链接时, cl, k=al, k=0。
表 1总结了基于声传感器网络的分布式FxLMS算法。
| 分布式FxLMS算法 |
| 1)初始化:wk(1)=[0, …, 0]T |
| 2) n=1, 算法开始 |
| 3) 重复以下步骤 |
| 4) 获得参考信号x(n) |
| 5) for 1≤k≤K |
| 6) wk(n)=[wk(n)]IL(k-1)+1:ILk |
| 7) yk(n)=wk(n)X(n)(:, 1) |
| 8) for 1≤j≤K |
9) 
|
| 10) end |
| 11) rk(n)=[r1k(n)T, r2k(n)T, …, rjk(n)T]T |
| 12) end |
| 13) for 1≤k≤K |
14) 
|
| 15) end |
| 16) for 1≤k≤K |
17) 
|
| 18) end |
| 19) n=n+1 |
为了分析分布式FxLMS算法的整体性能, 定义K×K阶融合矩阵C, 其元素为融合参数cl, k, 即
|
(21) |
满足

|
(22) |
式中:1为元素都为1的K×1阶列向量。
同样地, 定义K×K阶链接矩阵A, 有

|
(23) |
当C=11T, A=I, (20)式等效为集中式控制系统; 当C=A=I时, 各节点之间没有链接, 单独进行控制, 称为无合作模式[6]; 当C≠I, A=I时, (20)式等效为Song的算法[9]。
本节中, 对上述推导的分布式FxLMS算法进行详细的性能分析。分别在平均意义和均方意义下, 对系统动态性能和稳态性能进行了分析, 分别推导了分布式系统达到稳态时控制权系数值和动态均方离差差分(mean square deviation, MSD)方程。推导过程运用了自适应算法推导中常用的独立性假设[12]。
2.1 平均意义下的稳态权系数分布式FxLMS算法通过(20)式进行迭代。为了分析算法的性能, 需要综合考虑整个传感器网络。定义Ψ=[ϕ1T, ϕ2T, …, ϕKT]T和W=[w1T, w2T, …, wKT]T。(20)式进一步变为
|
(24) |
式中,U=diag{μ1IIJK, μ2IIJK, …, μKIIJK}, Q1=C⊗IIKL, ⊗表示克罗内克积运算, Q2=A⊗IIKL。T1=col{r1(n)d1(n), r2(n)d2(n), …, rK(n)dK(n)}, T2=col{r1(n)r1(n)Tw1(n), r2(n)r2(n)Tw2(n), …, rK(n)rK(n)TwK(n)}。
在小步长参数下, 假设系统控制权系数与滤波x信号独立。对上式取集平均可得

|
(25) |
式中
|
分布式ANC系统的权系数迭代公式合成一步, 有
|
(26) |
当n→∞, 可得

|
(27) |
求解上式

|
(28) |
则

|
(29) |
由此, 可以获得分布式系统达到稳态时的单个节点控制权系数。
2.2 均方意义下的收敛特性为了分析分布式系统的动态特性, 定义

|
(30) |
式中

|
(31) |
如果分布式ANC系统能够抵消初级声场, 则第k个节点上的初级信号应当满足

|
(32) |
式中, vk(n)为均值为0, 方差为σ2的高斯白噪声。将(32)式代入(20)式可得

|
(33) |
由(31)式, (33)式可变为
|
(34) |
按照(24)式的形式, 将(34)式扩展到整个系统
|
(35) |
式中

|
(36) |

|
(37) |
将(35)式合成一步, 有

|
(38) |
为了进一步获得分布式网络权系数MSD, 对(38)式两边平方后再取集平均, 如(39)式所示

|
(39) |
令
|
(40) |
式中

|
(41) |
令ε=vec(Σ), 则有Σ=vec-1(ε)。vec表示将矩阵Σ转化为对应的列向量。现在, 可以利用


|
(42) |
式中

|
为了得到MSD的递推公式, 进一步对上式进行化简, 有
|
(43) |
当ε=vec(diag(ek)⊗IIL)时, 有

|
(44) |
式中,ek为第(k-1)×(K+1)+1个对角元素为1, 其余元素都为0的K2×K2阶矩阵。则(43)式变为
|
(45) |
由此, 可以获得分布式算法权系数MSD动态差分方程。
3 仿真验证在本节中, 用计算机仿真验证推导的分布式算法的特性, 并比较理论分析与仿真结果。仿真中所使用的传感器网络结构如图 2所示。网络中有4个节点, 每个节点含有1个次级声源和1个误差传感器。误差传感器和次级声源皆呈线性排布, 相邻两节点的误差传感器之间的距离与次级声源之间的距离均为20 cm, 每个节点内误差传感器与次级声源之间的距离为30 cm, 所有的误差传感器和次级声源均在同一高度上。仿真中所用次级通路为普通房间内实际测量得到的次级通路, 其中2个次级通路的幅频响应如图 3所示。假设该次级通路为完美估计。传感器网络中节点只与其相邻接点有通信链接, 且网络节点之间的通信不受传输速率或运算负载的约束。初级声源为零均值的高斯随机噪声, 由此产生的参考信号提供给传感器网络中所有节点。设置信号采样频率为Fs=2 000 Hz, 选择建模滤波器长度为M=256, 自适应迭代权系数长度为L=64。

|
| 图 2 含有4个节点的声传感器网络 |

|
| 图 3 次级通路幅频响应 |
在第一组仿真中, 评估系统达到稳态时平均意义下的权系数。将(29)式中推导的理论表达式与进行仿真时滤波器收敛后获得的权系数进行比较。仿真结果选取400 000 0次迭代后得到的结果。关于求解理论值, 对每个节点rk(n)的IJL×IJL阶自相关矩阵和rk(n)与dk(n)的IJL阶互相关列向量进行集平均获得对Rk与Pk, 进而计算出系统达到稳态时权系数的期望值。图 4显示了仿真中收敛后滤波器权系数的幅度谱与理论值的比较, 选择比较的权系数分别为w1和w2(见图 4a)和图 4b))。结果表明, 仿真值与理论值吻合较好。

|
| 图 4 控制权系数幅频响应仿真值与理论值比较 |
在第二组仿真中, 评估分布式FxLMS算法的MSD。考虑如图 2所示的声传感器网络, 在仿真中, 利用(30)式, 由每次迭代中权系数向量与最优权系数的差值得到MSD。每个节点上初级声场中包含的噪声项vk(n)为零均值的高斯白噪声。通过对10次独立的仿真过程进行平均, 得到MSD随迭代次数的变化曲线。对于理论值, 由(44)式进行计算。同样地, 该式中需要对每个节点rk(n)的IJL×IJL阶自相关矩阵取得集平均。图 5描述了声传感器网络中节点1在不同步长参数下的MSD曲线。如图中所示, 仿真值与理论值吻合较好。正如其他自适应算法表现得那样, 步长参数对算法的收敛性能有着直接影响。在一定范围内, 步长越大, 算法的收敛速度越快。通常需要在理论分析的基础上, 通过试错的方法对步长进行选择, 使得算法能够达到最快的收敛速度[7]。

|
| 图 5 不同步长参数下MSD仿真值与理论值比较 |
最后, 算法的降噪效果进行评估。在同一条件下, 分别利用集中式FxLMS、分布式FxLMS和非合作式FxLMS比较它们的性能。非合作式FxLMS是分布式算法C=A=I的特殊情况。
|
(46) |
由(46)式可以获得系统降噪量随迭代次数变化的学习曲线。对每种算法选择合适的步长参数μ以获得最快的收敛速度。对于分布式FxLMS算法, 选择融合矩阵C=I, 链接矩阵
|
(47) |
为了得到不同算法的瞬时降噪量, 每种算法分别进行10次独立实验, 仿真结果如图 6所示。

|
| 图 6 分别使用3种算法的系统降噪量 |
仿真中, 节点1处误差信号随时间变化的时域波形如图 7所示。由图 6和图 7可以看出, 分布式FxLMS与集中式FxLMS最终达到的降噪量基本一致。无合作式算法在系统刚开始工作时还有一定的降噪效果, 然后逐步发散。说明在当前结构下, 节点之间的通信是必需的。

|
| 图 7 3种算法误差信号随时间变化波形 |
统计3种算法的运算量,即单个采样时间内算法所需的乘加运算次数,如表 2所示。在集中式算法中,需要在单个处理器中完成全部运算,对于分布式FxLMS和无作式FxLMS算法,考虑网络中单个节点的运算量。由表中可以看出,由于分布式FxLMS将运算量分布到各个节点,其总值只有集中式算法的1/4。在大规模ANC系统中,这一数据将更加可观。非合作式FxLMS运算量最低,但其面临着系统发散的问题。
| 运算量 | 算法 | ||
| 集中式 FxLMS |
分布式 FxLMS |
非合作式 FxLMS |
|
| 计算扬声器输出 | 1 024 | 256 | 256 |
| 求解滤波x信号 | 4 096 | 1 024 | 1 024 |
| 权系数迭代 | 4 096 | 1 024 | 256 |
| 总值 | 9 216 | 2 304 | 1 536 |
针对大规模ANC系统运算量激增的问题,本文由系统的代价函数出发,推导了基于声传感器网络的分布式FxLMS算法,算法中每个节点与其邻居节点有一定的协作。然后进行了算法收敛特性分析,得到了分布式FxLMS算法达到稳态时的控制滤波器权系数和MSD动态差分方程。最后在一个特定的4节点声传感器网络中,通过计算机仿真验证了理论分析的正确性,同时比较了不同控制算法的性能。从仿真结果可以看出,分布式算法与集中式算法性能一致,达到的降噪效果基本相同,而非合作式FxLMS算法不能正常工作。分布式FxLMS将算法的运算量由整个系统分配到单个节点,在处理器运算能力的限制下,能够实现通道数更多的ANC系统。本文中没有考虑声传感器网络结构对链接矩阵选择的影响,可以进行下一步的研究。
| [1] |
陈克安. 有源噪声控制[M]. 北京: 国防工业出版社, 2014: 7-10.
CHEN Kean. Active Noise Control[M]. Beijing: Aotional Defence Indeustny Press, 2014: 7-10. (in Chinese) |
| [2] | JOHANSSON S, CLAESSON I, NORDEBO S, et al. Evaluation of Multiple Reference Active Noise Control Algorithms on Dornier 328 Aircraft Data[J]. IEEE Trans on Speech and Audio Processing, 1999, 7(4): 473-477. DOI:10.1109/89.771319 |
| [3] | ELLIOTT S J, BOUCHER C C. Interaction between Multiple Feedforward Active Control Systems[J]. IEEE Trans on Speech and Audio Processing, 1994, 2(4): 521-530. DOI:10.1109/89.326611 |
| [4] | GEORGE N V, PANDA G. A Particle-Swarm-Optimization-Based Decentralized Nonlinear Active Noise Control System[J]. IEEE Trans on Instrumentation and Measurement, 2012, 61(12): 3378-3386. DOI:10.1109/TIM.2012.2205492 |
| [5] | LEBOUCHER E, MICHEAU P, BERRY A, et al. A Stability Analysis of a Decentralized Adaptive Feedback Active Control System of Sinusoidal Sound in Free Space[J]. The Journal of the Acoustical Society of America, 2002, 111(1): 189-199. DOI:10.1121/1.1427358 |
| [6] | FERRER M, DE DIEGO M, PINERO G, et al. Active Noise Control over Adaptive Distributed Networks[J]. Signal Processing, 2015, 107: 82-95. DOI:10.1016/j.sigpro.2014.07.026 |
| [7] | FERRER M, GONZALEZ A, DE DIEGO M, et al. Distributed Affine Projection Algorithm over Acoustically Coupled Sensor Networks[J]. IEEE Trans on Signal Processing, 2017, 65(24): 6423-6434. DOI:10.1109/TSP.2017.2742987 |
| [8] | ANTONANZAS C, FERRER M, DE DIEGO M, et al. Collaborative Method Based on the Acoustical Interaction Effects on Active Noise Control Systems over Distributed Networks[C]//IEEE International Conference on Acoustics, Speech and Signal Processing, 2017: 606-610 |
| [9] | SONG J, PARK P. A Diffusion Strategy for the Multichannel Active Noise Control System in Distributed Network[C]//International Conference on Computational Science and Computational Intelligence, 2016: 659-664 |
| [10] | KUKDE R, PANDA G, MANKANDAN M S. On Distributed Non-Linear Active Noise Control Using Diffusion Collaborative Learning Strategy[J]. IET Signal Processing, 2018, 12(4): 410-421. |
| [11] | CHEN J, SAYED A. Diffusion Adaptation Strategies for Distributed Optimization and Learning over Networks[J]. IEEE Trans on Signal Processing, 2012, 60(8): 4289-4305. DOI:10.1109/TSP.2012.2198470 |
| [12] | ARDEKANI I T, ABDULLA W H. On the Convergence of Real-Time Active Noise Control Systems[J]. Signal Processing, 2011, 91: 1262-1274. DOI:10.1016/j.sigpro.2010.12.012 |
