

2. 西安地平线电子科技有限公司, 陕西 西安 710072
控制飞机在飞行性能边界范围内精确追踪三维空间中剧烈变化的航迹是无人机自主空中格斗的一个关键问题。在追踪三维航迹的过程中, 飞机可能会遇到动力学强烈的非线性高耦合特性、奇异性(万向节死锁)、持续高过载、短时间内剧烈的速度高度以及过载变化等问题。飞机在大迎角(偏离线性化的平衡点)飞行时, 基于传统增益调参方法(gain-scheduled)的飞行控制律会产生非线性和高耦合的问题, 所以需要新的控制方法设计飞行控制律。非线性动态逆方法[1-3]是一种状态反馈线性化方法。通过构造系统状态的非线性反馈对消被控对象的非线性, 从而构成全局线性化; 然后, 在伪线性系统的基础上, 可以使用线性化系统的设计方法, 实现所需的系统响应。因而非线性动态逆方法是一种一般化的通用控制策略和方法[4], 已经被广泛运用在飞行控制律设计上, 尤其是在军用飞机的控制律设计上[5]。例如美军目前最先进的F-35战斗机平台采用的就是非线性动态逆飞行控制律设计方法[6]。
从20世纪80年代末以来, 国内外研究者应用非线性动态逆方法在飞行控制律设计领域做了大量的研究工作。Snell等[3]结合非线性动态逆与奇异摄动理论, 把飞机的飞行参数分为快变量([p, q, r]T)、较慢变量([α, β, μ]T)和慢变量([V, γ, χ]T), 分别对应上述变量设计快、较慢回路(也称内、外回路)和机动产生器, 详细讨论了快回路和较慢回路的设计。参考文献[7-8]都对机动产生器做了详细的介绍, 但文献[7]主要研究的是不会产生奇异性的着陆控制系统, 因此没有涉及到机动产生器的奇异性问题。文献[8]提及使用[V, γ, χ]T表示航迹会在γ=±90°时引发奇异性问题, 但因为研究的机动并不会经过γ=±90°, 所以也没有对奇异性问题进行深入的讨论。
很多国内外研究者采用四元数代替欧拉角表示飞机的姿态, 来解决飞机在飞行过程中出现的奇异性问题。Robinson在文献[9]中介绍了如何使用四元数(quaternion)表示刚体的姿态、四元数和欧拉角的关系以及四元数的运算法则。文献[10]详细讨论了当使用欧拉角表示刚体姿态时产生的奇异性(singularities)也称万向节死锁(gimbal lock)问题。参考文献[11]引入四元数来解决飞行过程中出现的姿态回路([α, β, μ]T)奇异性问题, 在此基础上设计了基于四元数的控制律架构, 但文中并未讨论基于四元数的航迹回路([V, γ, χ]T)设计。同时, 文献[11]对航迹倾斜角μ的多值问题也没有进行讨论。
本文简要介绍了机动产生器的设计, 深入探讨了航迹倾斜角μ的求解, 并对航迹坐标轴系(本文简称为航迹轴系, 用n表示)在飞机沿着会引发奇异性航迹飞行时, 产生突变的现象进行了研究。为了解决航迹轴系的突变问题, 对现有的航迹轴系进行修正, 提出了修正航迹坐标轴系(本文简称为修正航迹轴系, 用m表示)。最后结合四元数和非线性动态逆理论的思想对机动产生器进行设计, 实现了基于四元数的机动产生器, 解决了连续航迹控制的奇异性问题。
1 动态逆控制器设计一般非线性系统(被控对象)都可表达为状态量、控制量和输出量的形式

|
(1) |
式中:F(x, u)为状态量x和控制量u的非线性函数; h(x)是关于状态量x的非线性函数。
如果系统可以被描述成微分几何理论中的仿射非线性形式
|
(2) |
与一般非线性系统相比, 仿射非线性系统中状态的导数关于控制输入u是线性的((2)式)。
若g(x)可逆, 令u=g-1(x)[-f(x)+v], 则
假设

|
(3) |
式中:ω为系统的频带或增益;

|
| 图 1 NDI控制器结构 |
利用非线性动态逆设计飞行控制律, 主要有2种综合方法, 本文采用的是状态反馈型方法[4]。
直接应用状态反馈型方法, 必须满足状态量的维数和控制量维数相同, 常规布局的固定翼飞机一般有12个状态量(见(4)式)以及4个控制量(见(5)式)。

|
(4) |

|
(5) |
结合奇异摄动理论, 即状态变量的时标分离方法, 飞机状态量(见(4)式)可以分解成快慢不同的4组:
[p, q, r]T为飞机转动角速度矢量, p, q, r分别表示飞机角速度在机体坐标轴系纵、横和竖轴的分量, 该组变量变化快, 称为快变量。
[α, β, μ]T为相对于风轴的姿态矢量, α, β, μ分别表示飞机迎角、侧滑角和航迹倾斜角, 该组变量比角速度矢量变化慢,称为较慢变量。
[V, γ, χ]T为相对于地轴的速度矢量, V, γ, χ分别表示飞机飞行速度、爬升角和航迹方位角, 变化慢, 称慢变量。
[x, y, z]T为飞机对地位置矢量。
[δT, δa, δe, δr]T为飞机的控制量, δT是飞机油门控制量, δa, δe, δr分别是飞机副翼、升降舵和方向舵偏角。
将3组不同快慢的变量, 用状态反馈的综合控制方法进行设计, 可形成3组不同频带的子系统, 根据奇异摄动理论, 当频带相差3~5倍时, 在工程上回路之间的影响忽略不计, 可以各自独立设计回路。
快回路的仿射非线性形式

|
(6) |
式中:下标f代表快回路;xf表示快回路的状态变量(xf=[p, q, r]T);uf表示快回路的控制变量(uf=[δa, δe, δr]T)。
假设快回路期望的闭环动力学系统为一阶环节
|
(7) |
vf表示期望快变量变化率; 






|
(8) |
同理较慢回路的仿射非线性形式

|
(9) |
式中:下标m代表较慢回路;xm表示较慢回路的状态变量(xm=[α, β, μ]T);um表示较慢回路的控制变量(um=[p, q, r]T)。
假设较慢回路期望的闭环动力学系统为一阶环节
|
(10) |
vm表示期望较慢变量变化率; 






|
(11) |
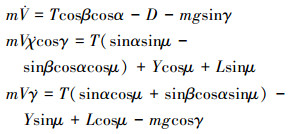
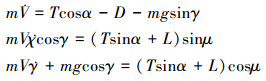
慢变量[V, γ, χ]T属于轨迹控制, 对应状态反馈动态逆方法的慢回路设计, 参考文献[12]使用慢变量来描述飞机的轨迹指令, 也称对应的控制器为机动产生器。后来关于慢回路的论文基本沿用了这个名称。机动产生器的设计思想与快、较慢回路相似, 但是机动产生器的控制输入[α, β, μ]T在(12)式中以三角函数的形式存在, 而且气动力(升力L, 阻力D和侧力Y)是状态控制输入[α, β, μ]T的非线性函数, 因此航迹轴系下力方程(12)式无法写为类似(8)式和(11)式的仿射非线性形式[13], 不能直接运用动态逆理论进行求解, 只能通过简化航迹轴系下力方程进行求解[8]。
|
(12) |
本文不考虑风的影响, 航迹迎角αk和迎角α重合, 航迹侧滑角βk和侧滑角β重合, 航迹速度(地速)Vk和飞行速度V大小相等, 不加以区分。
(12) 式中m表示飞机质量, g表示重力加速度, 


假设飞行过程中侧力Y和侧滑角β都为0, 航迹轴系下力方程可以简化为以下形式
|
(13) |
把(13)式中的,





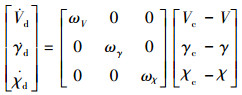
|
(14) |
ωV, ωγ, ωχ分别对应回路的带宽; Vc, γc, χc分别表示指令飞行速度, 指令爬升角和指令航迹方位角。根据简化方程(13)式和(14)式, 解得指令航迹倾斜角μc
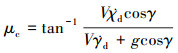
|
(15) |
再根据(13)式和(14)式构建只有一个未知数指令迎角αc的方程

|
(16) |
式中:D(V, αc)表示阻力为飞行速度V和指令迎角αc的函数;L(V, αc)表示升力为飞行速度V和指令迎角αc的函数。
在侧力和侧滑角都为0的假设下, 根据(15)式和(16)式, 已知航迹指令[Vc, γc, χc]T, 求解得到慢回路的指令值[αc, βc, μc]T(βc=0)。
机动产生器、较慢回路以及快回路[3-4]构成了无人机航迹追踪的控制回路。
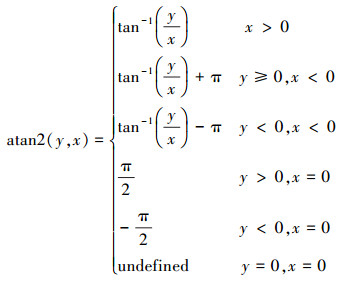
3 航迹倾斜角的多解问题当利用反正切函数求解指令航迹倾斜角μc(见(15)式), 反正切函数的值域为(-90°, 90°), 小于实际飞行中μ的变化范围。如果直接用反正切函数求解, μ在绝对值接近90°时产生指令跳变, 会导致仿真过程中飞行参数的发散[8]。
图 2a)表示飞机被控制向右上方运动(





|
| 图 2 航迹倾角的多解示意图 |
为了解决(15)式计算的航迹倾斜角值域与实际飞行航迹倾斜角值域不一致的问题, 本文将从飞机受力与运动的角度讨论如何让μ的计算值与实际值为一一映射。
在侧滑角为0的假设下, 飞机只受到推力T、阻力D、升力L和重力G的作用。飞机所受重力之外的合力沿速度方向和垂直于速度方向分解, 分别为(Tcosα-D)和(Tsinα+L)。因为人的生理限制, 要避免承受负过载。有人驾驶飞机做机动时, 一般都是采用拉杆的方式, 所以认为(Tsinα+L)大于0。根据(13)式, 



因此, μc的值不仅由(15)式决定, 还与


|
(17) |
式中
|
相比于有人驾驶飞机, 无人机可以不用考虑人承受过载的限制, 在机动过程中对于(Tsinα+L)的正负没有限制。无人机μc计算以及机动方式都与有人驾驶飞机有所不同。
假设飞机先向着









|
(18) |
式中:μ1表示保持正过载机动方式对应的指令航迹倾斜角; μ2表示负过载机动方式对应航迹倾斜角。
4 奇异性问题使用[V, γ, χ]T表示连续航迹, 在爬升角γ为正负90°时, 地速矢量处于铅垂线上, 在水平面的投影退化成一个点, 航迹方位角χ没有定义, 此即奇异性问题。本文把爬升角为正负90°的点称为奇异点。
使用四元数代替欧拉角表示刚体的姿态[10-11]是解决奇异性问题最常用的方法。为了能够避免出现奇异性问题, 使用四元数qe2n替代[0, γ, χ]T表示航迹轴系相对飞机牵连铅垂地面坐标轴系(本文简称为飞机牵连地轴系, 用e表示)的姿态, 即用[V, qe2n]T来表示三维空间的航迹。
关于四元数的定义和运算规则可以参考文献[14]。本文中的四元数定义为

|
(19) |
式中:q0, q1, q2和q3是实数; i, j和k既是互相正交的单位向量, 又是虚单位
通常使用四元数代替欧拉角表示刚体姿态可以解决奇异性问题, 但是利用四元数qe2n并未能消除航迹轴系相对于飞机牵连地轴系姿态的奇异性问题(见图 3)。

|
| 图 3 飞机经过奇异点航迹轴系突变示意图 |
航迹轴系在国标GB/T 14410.1-2008中的定义:原点通常固定于飞机的重心, 其xn轴沿航迹速度(也称地速)方向, zn轴在包含xn轴的铅垂平面内, 垂直于xn轴, 指向下方, yn轴垂直于znxn平面指向右方[15]。
按照上述航迹轴系的定义, 当航迹轴系的xn轴垂直于水平面时(地速方向为铅垂方向), 无法找到满足上述定义的zn轴。所以航迹轴系在地速为铅垂方向时, 没有定义。
相比于一般固联于飞机的坐标轴系, 例如机体坐标轴系、气流坐标轴系等, 他们与飞机牵连地轴系的相对姿态都是由3个姿态角(滚转、俯仰和偏航方向的姿态角)描述的。一般固联于飞机的坐标轴系相对于飞机牵连地轴系有3个旋转自由度, 而航迹轴系相对于飞机牵连地轴系的姿态只有航迹方位角χ和爬升角γ 2个姿态角来描述, 只有2个旋转自由度, 缺少了一个滚转方向的旋转自由度[16]。当飞机经过奇异点时, 航迹轴系在空间内产生突变, 导致航迹轴系相对于飞机牵连地轴系的姿态产生突变, 因此用来描述航迹轴系相对于飞机牵连轴系姿态的四元数qe2n无可避免地产生突变。例如飞机只做单纯的俯仰运动时, 在经过爬升角90°(奇异点之一)时, 会引发航迹轴系绕xn旋转, 并导致其突变。
如图 3所示, 飞机从右到左以筋斗机动经过爬升角90°时, 根据航迹轴系的定义, 其yn轴和zn轴绕xn轴瞬间旋转了180°。
为了解决航迹轴系旋转自由度缺失引起的突变问题, 在飞机经过奇异点时, 补全航迹轴系的旋转自由度。即把图 3中左边的航迹轴系在爬升角为90°时绕xn轴转动角度-180°, 这样旋转后的轴系和未经旋转的轴系, 在整个机动过程中保证了姿态连续的变化, 这个轴系称为修正航迹轴系。
修正航迹轴系是在当前航迹轴系的基础上绕xn轴旋转-i·180°得到的。

|
(20) |
式中:qe2m表示修正航迹轴系相对飞机牵连地轴系姿态四元数;q-πi表示绕航迹轴系xn轴旋转-180°四元数的i次方, i表示飞机在飞行过程中经过的奇异点次数, ×表示四元数乘法。
5 基于四元数的机动产生器设计假设qcom表示期望姿态的指令四元数, qact表示当前姿态的实际四元数, qa2b是表示坐标轴系B相对坐标轴系A的姿态四元数, qa2c是表示坐标轴系C相对于坐标轴系A的姿态四元数。
假设坐标轴系B固联于飞机, 坐标轴系A是惯性轴系, 所以坐标轴系B相对坐标轴系A的姿态表示飞机的实际姿态, 假设坐标轴系C相对于A的姿态表示期望姿态, 所以四元数qcom, qact, qa2b和qa2c有如下关系

|
(21) |
要使飞机的实际姿态达到期望姿态, 就是让与飞机固联的坐标轴系B旋转到坐标轴系C。根据四元数的计算法则以及性质, 实际姿态四元数和期望姿态四元数关系如(22)式[11]所示
|
(22) |
式中,qerr表示实际姿态与期望姿态的误差四元数。
根据四元数的求导法则, (22)式求导得到

|
(23) |
再根据四元数和其对应的角速度的关系
|
(24) |
ωbba表示坐标轴系B相对于坐标轴A的旋转角速率在坐标轴系B中的表示; ωcca表示坐标轴系C相对于坐标轴系A的旋转角速率在坐标轴系C中的表示。
由(21)至(24)式, 可以得到

|
(25) |
当qerr_cmd=[0, 0, 0, 1]T时, qact=qcom, 飞机达到期望的姿态。要使飞机的实际姿态到达期望的姿态, 需要把qerr控制到qerr_cmd。现在定义

|
(26) |
式中:ωq是四元数回路的带宽。因为qerr和-qerr都是表示从实际坐标轴系旋转到期望坐标轴系的姿态四元数, qerr表示绕固定轴旋转θ, -qerr表示绕同一个轴反向旋转2π-θ。Aqerr表示从实际姿态到期望姿态是经过θ和2π-θ中较小角度旋转的四元数, 即qerr和-qerr中实部q3≥0的四元数[14]。
如果飞机能够按照期望误差四元数变化率


|
(27) |
现在用qe2c表示期望修正航迹轴系(本文用c表示期望修正航迹轴系)相对于飞机牵连地轴系的期望姿态四元数, 对应(22)式中的qcom。qe2m表示实际修正航迹轴系相对于飞机牵连地轴系的实际姿态四元数, 对应(22)式中的qact。现在把四元数qe2c和qe2m代入(22)式得到qe2m和qe2c的误差四元数qerr。
|
(28) |
把四元数qe2c和qe2m代入(27)式, 得到修正航迹轴系相对飞机牵连地轴系的指令角速度在修正航迹轴系的投影ωmm_cmde

|
(29) |
式中,ωcce表示期望修正航迹轴系相对于飞机牵连地轴系的角速度在期望修正航迹轴系中的分量。ωcce无法直接得到, 可以通过第k步和第k-1步的四元数qe2c和(24)式数值求解, 如(30)式所示[11]
|
(30) |
根据期望爬升角的变化率


|
(31) |
式中:i和(20)式中的i一样, 表示经过奇异点的次数;[pm_cmd, qm_cmd, rm_cmd]T分别表示修正航迹轴系相对牵连地轴系的角速度在修正航迹轴系x, y, z轴的分量。
基于修正航迹轴系相对飞机牵连地轴系的四元数控制架构如图 4所示。

|
| 图 4 修正航迹轴系相对地轴系的四元数控制架构 |
图 4中期望飞行速度变化率


基于四元数机动产生器的设计结合提出的修正航迹轴系, 保证了飞机在整个航迹追踪过程中不会出现奇异性, 以实现对经过奇异点连续航迹的追踪。
6 仿真试验筋斗机动在整个机动过程中会分别经过爬升角正负90°, 因此选择控制飞机追踪筋斗机动的航迹来验证修正航迹轴系和四元数控制架构是否解决了连续航迹追踪的奇异性问题。
6.1 验证航迹轴系突变图 5给出了飞机执行筋斗机动过程中, 爬升角γ和航迹方位角χ随时间变化的曲线。图 6给出了四元数qe2n和qe2m随时间变化的曲线。其中qi, i=0, 1, 2, 3…表示四元数的各个分量, 实线表示对应四元数qe2n的分量, 虚线表示对应四元数qe2m的分量, 竖直的虚线与图 5中的竖直虚线对应, 都表示飞机经过奇异点的时刻。

|
| 图 5 筋斗机动过程中爬升角和航迹方位角随时间变化 |

|
| 图 6 筋斗机动过程中四元数随时间变化 |
根据图 5和图 6可以看出四元数qe2n会在爬升角为正负90°时产生突变, 而四元数qe2m则是连续变化的, 而且在突变之前qe2n=qe2m, 与修正航迹轴系的定义相一致。
图 5和图 6的仿真结果证明了单纯的使用四元数qe2n代替欧拉角来表示连续航迹, 还是无法避免出现奇异性问题。针对航迹轴系突变造成的奇异性问题, 本文在航迹轴系基础上的提出修正航迹轴系, 他相对于飞机牵连地轴系的姿态四元数qe2m是连续变化的, 避免了奇异性问题的发生, 可以作为连续航迹控制问题的控制变量。
6.2 验证基于四元数和修正航迹轴系的航迹追踪以图 6中整个筋斗机动过程中的四元数qe2m作为指令四元数qcom, 验证基于四元数的航迹追踪框架对于筋斗机动航迹的追踪效果。飞机在跟随指令四元数qcom过程中, 修正航迹轴系相对飞机牵连地轴系的姿态四元数qe2m为飞机的实际四元数qact。由于四元数的物理含义不直观所以绘制与四元数qact和qcom分别对应的实际航迹角、指令航迹角以及所对应的角度偏差来说明筋斗机动的跟踪效果, 如图 7所示。

|
| 图 7 指令航迹角与实际航迹角以及其对应的误差 |
图 7a)至7b)说明在筋斗过程中, 除了爬升角正负90°时, 航迹方位角的误差值一直为0, 这是因为在筋斗过程中, 在经过奇异点之前, 指令航迹方位角没有变化而且一开始实际航迹方位角与指令航迹方位角具有同样的初始值。爬升角经过正负90°时, 航迹方位角产生了180°的误差, 这是因为实际爬升角滞后于指令爬升角产生的。图 7c)至7d)显示实际爬升角相比于指令爬升角有最大达到近2°的滞后。
基于图 6仿真结果的对比与分析, 可以发现即使采用四元数qe2n代替欧拉角表示航迹轴系相对飞机牵连地轴系的姿态, qe2n在爬升角正负90°时还是会发生突变的现象, 这正是上文讨论的航迹轴系的突变引起的, 所以qe2n是不能用来作为连续航迹的控制变量指令。而当采用本文提出的修正航迹轴系时, 修正航迹轴系相对飞机牵连地轴系的姿态四元数qe2m在整个机动过程中连续变化, 可以用来作为连续航迹的控制变量指令。图 7的仿真结果表示当使用[V, qe2m]T作为航迹控制变量指令时, 可以实现三维空间内经过奇异点的连续航迹控制, 而且航迹跟踪的滞后量与滞后时间都很小, 取得了良好的跟踪效果。
7 结论本文简要介绍了非线性动态逆理论与机动产生器的设计。在此基础上从物理成因上分析了航迹倾斜角的多解问题, 分析了人的生理过载限制对航迹倾斜角求解和机动方式的影响。
在解决追踪连续轨迹航迹角产生奇异性问题的过程中, 探讨了即使使用航迹轴系相对飞机牵连地轴系四元数代替航迹角也无法解决奇异性问题, 揭示了航迹轴系在奇异点没有定义的缺陷。航迹轴系的定义导致其经过奇异点不是连续变化的, 因此无法采用航迹轴系相对飞机牵连地轴系的四元数来表示连续航迹。为解决这一问题, 本文提出一种修正航迹轴系的方法, 在航迹轴系的基础上, 经过奇异点人为的进行修正, 使修正航迹轴系经过奇异点时是连续变化的。使用修正航迹轴系相对飞机牵连地轴系的姿态四元数表示连续航迹, 解决了航迹轴系相对飞机牵连地轴系的姿态在奇异点突变的问题。
最后推导了基于四元数的控制架构, 设计了基于修正航迹轴系相对飞机牵连地轴系的姿态四元数的机动产生器, 解决了控制飞机追踪连续航迹的奇异性问题, 从仿真结果来看, 滞后量与滞后时间都很小, 且具有良好的跟踪特性。
| [1] | STEVENS B L, LEWIS F L, JOHNSON E N. Aircraft Control and Simulation:Dynamics, Controls Design, and Autonomous Systems[M]. Hoboken, New Jersey: John Wiley & Sons, 2015. |
| [2] | REIGELSPERGER W C, BANDA S S, LEMASTER D P. Application of Multivariable Control Theory to Aircraft Control Laws[R]. WL-TR-96-3099, 1996 |
| [3] | SNELL S A, ENNS D F, GARRARD W L. Nonlinear Inversion Flight Control for a Supermaneuverable Aircraft[J]. Journal of Guidance, Control, and Dynamics, 1992, 15(4): 976-984. DOI:10.2514/3.20932 |
| [4] |
郭锁凤, 申功璋, 吴成富, 等. 先进飞行控制系统[M]. 北京: 国防工业出版社, 2003.
GUO Suofeng, SHEN Gongzhang, WU Chengfu, et al. Advanced Flight Control System[M]. Beijing: National Defense Industry Press, 2003. (in Chinese) |
| [5] | VAN'T VELD R. C. Incremental Nonlinear Dynamic Inversion Flight Control[D]. Delft, Delft University of Technology, 2016 |
| [6] | HARRIS J J. F-35 Flight Control Law Design, Development and Verification[C]//2018 Aviation Technology, Integration, and Operations Conference, Atlanta, Georgia, 2018 |
| [7] |
韩英华, 范彦铭. 基于非线性动态逆的无人机自动着陆控制系统[J]. 航空学报, 2008(增刊1): 66-72.
HAN Yinghua, FAN Yanming. Control System of Automatic Landing of UAV Based on Nonlinear Dynamic Inversion[J]. Acta Aeronautica et Astronautica Sinica, 2008(suppl 1): 66-72. (in Chinese) |
| [8] |
左军毅.推力矢量飞机非线性控制律设计研究[D].西安: 西北工业大学, 2003 ZUO Junyi. Study of Thrust Vector Aircraft Control Law[D]. Xi'an: Northwestern Polytechnical University, 2003(in Chinese) |
| [9] | ROBINSON A C. On the Use of Quaternions in Simulation of Rigid-Body Motion[R]. Tech, Rep, 1958: 58-17 |
| [10] | DIEBEL J. Representing Attitude:Euler Angles, Unit Quaternions, and Rotation Vectors[J]. Matrix, 2006, 58(15/16): 1-35. |
| [11] | BACON B. Quaternion-Based Control Architecture for Determining Controllability Maneuverability Limits[C]//AIAA Guidance, Navigation, and Control Conference, Minneapolis, Minnesota, 2012 |
| [12] | SNELL S, GARRARD W, ENNS D. Nonlinear Control of a Supermaneuverable Aircraft[C]//Guidance, Navigation and Control Conference, Boston, MA, 1989 |
| [13] |
张楠.基于动态逆理论的舰载机着舰控制律设计[D].西安: 西北工业大学, 2017 ZHANG Nan. Landing Control Law Design of Carrier Based Aircraft Using Nonlinear Dynamic Inversion[D]. Xi'an: Northwestern Polytechnical University, 2017(in Chinese) |
| [14] | WIE B. Space Vehicle Dynamics and Control[M]. Tempe, Arizona: American Institute of Aeronautics and Astronautics Inc, 2008. |
| [15] |
中国航空工业第一集团公司.飞行力学概念、量和符号[S].GB/T 14410.1-2008 Aviation Industry Corporation of China. Flight Mechanics——Concepts, Quantities and Symbols[S]. GB/T 14410.1-2008(in Chinese) |
| [16] | ZIPFEL P H. Modeling and Simulation of Aerospace Vehicle Dynamics[M]. Gainesville, Florida: American Institute of Aeronautics and Astronautics Inc, 2007. |
| [17] | ENOMOTO K. A Study on the Dynamic Inversion Method with Nonlinear Function Considering Saturation[C]//AIAA Guidance, Navigation, and Control Conference, Toronto, 2010 |
2. Skyline Technologies, Xi'an, 710072, China
