



螺旋桨推进装置因为其低空、低马赫飞行下高的推进效率、出色的起降性能及经济性好等优势, 广泛应用于中小型运输机、舰载预警机、支线客机等航空飞行器上。随着化石能源的日益枯竭和人们对环境污染问题的日益关注, 对比喷气式推进装置, 高推进效率、低燃油消耗的螺旋桨推进装置得到越来越多的重视, 迎来了发展的新机遇。然而, 噪声污染问题一直是螺旋桨飞机发展的一大挑战。螺旋桨噪声除了影响驾驶员和乘客的舒适度、对机场附近形成严重的噪声污染外, 在极端情况下, 会诱发结构的振动和声疲劳问题, 影响飞机的安全性。因此, 控制螺旋桨辐射噪声是现代飞行器设计必须要面对的重要问题, 开展螺旋桨噪声预测及控制研究工作具有重要的现实意义。
在螺旋桨噪声预测及控制的研究工作中, 针对低噪声螺旋桨设计问题, 国外已经开展了大量的研究工作。Pagano等[1]对P180飞机螺旋桨桨叶进行了低噪声设计, 在六叶桨的基础上, 进行了考虑气动性能、气动弹性和气动噪声的多目标优化设计, 获得了1.5 dB的降噪量。Marinus等[2]利用Fluent软件、FW-H方程和Samcef软件对气动、噪声和结构强度进行评估, 采用改进的粒子群算法进行了优化设计。优化构型在起飞着陆阶段获得了5.2 dB的降噪量, 在巡航阶段, 获得了7.7 dB的降噪量。在不改变发动机型号、气动性能损失小于3%的前提下, Canard等[3]优化得到的ANIBAL桨叶巡航阶段的性能略差于初始桨, 但噪声降低了7 dB。国内王博[4]、招启军等[5]研究工作者陆续开展了基于CFD的螺旋桨或是旋翼的优化设计, 但关于螺旋桨气动与噪声优化设计的研究工作相对较少, 郭旺柳等[6]采用URANS方程和FW-H方程分别计算流场和声场, 结合Kriging代理模型和遗传算法针对旋翼桨尖外形进行了低噪声设计, 获得了5 dB的降噪量。朱正等[7]结合RANS、FW-H方程、代理模型和遗传算法对旋翼桨尖外形进行了多目标优化, 优化构型显著降低了桨尖涡强度和旋翼声压峰值。
综合看来, 国内螺旋桨气动与噪声多目标优化设计研究主要针对旋翼桨尖外形, 且大多采用二次函数或者三次函数对桨尖前后缘曲线等进行参数化, 难以直接对螺旋桨的三维曲面进行几何变形和重构。本文采用自由曲面变形和基于径向基函数插值的动网格方法对全桨进行优化, 外形参数化方法更为直观、灵活和鲁棒。此外, 采用Ffows Williams-Hawings(FW-H)方程进行噪声求解, 为了保证足够高的计算精度, 一般需要求解非定常流场, 计算成本高。为了准确预测螺旋桨噪声的同时节约计算成本, 许多针对螺旋桨噪声预测的频域计算方法发展起来。Gutin[8]在1932年提出了第一个成功应用于螺旋桨噪声计算的声学模型, 但该模型仅适用于只有轴向流动存在情形下无后掠简单外形、低叶尖马赫数、无前进速度的螺旋桨。Deming[9]第一个通过叠加螺旋桨平面中连续的源和汇的环模拟了有限厚度的叶片引起的噪声, 但并没有有效地消除声学理论上的限制。1953年, Garrick和Watkins[10]扩展了推力和扭矩引起的载荷噪声研究, 考虑了亚声速前进飞行的影响。1956年, Arnoldi[11-12]进一步发展了前向飞行时螺旋桨厚度噪声理论。1971年, Barry和Magliozzi[13]完善了Garrick及Watkins和Arnoldi的载荷噪声和厚度噪声的理论, 并考虑了叶片扭转的影响。1980年, Hanson[14]在此基础上提出了不局限于低叶尖马赫数要求、可适用于带后掠螺旋桨前向飞行的噪声预测模型。随后, Hanson[15]继续发展该模型并将其应用到迎角不为零飞行时螺旋桨噪声预测问题。Kotwicz等于2017年[16]和2019年[17], 通过与多个模型实验结果对比, 研究了不同螺旋桨噪声模型的预测精度。结果表明在预测纯音噪声时, 叶素动量理论结合Hanson噪声模型的计算方式相对于其他早期噪声理论, 多个算例与实验的平均误差最小[8], 具有较高的计算精度。因为叶素动量理论假设叶素上的作用力只与叶素所在圆环内的流体动量变化相关, 忽略了相邻圆环流体之间展向的相互作用, 所以本文采用计算精度相对更高的定常RANS方程计算方法, 将RANS方程与Hanson相结合。相对于URANS结合FW-H方程的方法, 该方法在保证较高精度的同时计算成本相对较低, 且能较为快速计算监测点的载荷噪声和厚度噪声。
在此基础上, 本文结合Kriging代理模型和遗传算法, 建立了螺旋桨多目标优化平台, 并对某民航客机螺旋桨进行了降噪优化, 获得了一些有意义的结论。
1 桨叶参数化与网格变形 1.1 自由曲面变形方法螺旋桨桨叶外形参数化是优化设计的基础, 本文采用基于非均匀有理B样条(non-uniform B-spline, NURBS)的自由曲面变形(free form deformation, FFD)方法(NFFD), 对初始构型进行展向各个剖面的扰动, 继而得到优化过程中的构型。自由曲面变形方法最初是由Sederberg和Parryin[18]在1986年提出的,其变形过程可以看作由2个部分组成。首先, 控制点以给定的方式移动。其次, 研究对象根据函数关系随控制点的移动而变形。在数学中, 在通过移动控制点变形之前, 需要将嵌入在FFD框架中的点映射到参数空间, 创建研究对象和控制点坐标之间的函数关系, 如(1)式所示

|
(1) |
式中:X(s, t, u)和Pi, j, k分别为研究对象表面上任意点的坐标和控制点的坐标;s, t和u为参数空间中表面几何点的局部坐标, 该数值由初始构型表面几何点和FFD控制点坐标确定, 即求解(1)式方程组得到;(l+1), (m+1)和(n+1)为控制框3个方向的控制点数;Bil(s), jmB(u)和Bkn(t)为Bernstein多项式, 表示为

|
在通过移动控制点使得控制框变形后, 可以得到控制点的坐标位移ΔPi, j, k。将ΔPi, j, k代入(2)式即可得到研究对象表面几何点的坐标位移sb。
|
(2) |
显然, 变形后的几何上任意点的坐标可以表示为

|
(3) |
然而, 采用基于Bernstein多项式的原始FFD方法, 控制点的位移将导致控制框内几何的整体变化。为了增强对研究对象变形的控制, NFFD方法[19]采用了非均匀有理B样条构建控制框, 并引入了控制点的权因子, 不仅可以通过调整控制点位置而且可以通过改变控制点的权因子来改变几何外形。数学上, NFFD方法利用NURBS基函数替换了Bernstein公式, 如(4)式所示
|
(4) |
式中:Wi, j, k为控制点的权因子;Bi, p(s), Bj, q(u)和Bk, r(t)分别为p阶, q阶和r阶的有理B样条基函数。
1.2 基于径向基函数的网格变形方法为了评估其气动性能, 需要生成新构型的网格用于数值模拟。本文选择使用径向基函数(radial basis function, RBF)进行网格变形。利用RBF实现网格变形的方法首先由Boer等[20]提出, 基于RBF的网格变形方法仅需要初始网格坐标和表面网格点位移, 可以容易地实现新网格自动生成。用于表示网格点位移的插值函数可写为
|
(5) |
式中:s(x)为任意网格点坐标x处的位移, N为表面网格点的数目;i为表面网格点的编号;γi和xi分别为第i个网格点处的插值系数和坐标;φ(‖x-xi‖)为径向基函数。为了确定权重系数γi, 将表面网格点坐标和位移代入(6)式, 可以得到关于权重系数的方程组
|
(6) |
式中
|
此处, sb为表面网格点位移组成的矩阵, 物面边界网格位移可由(2)式得到, 远场边界表面网格位移设置为零。Δxb, Δyb和Δzb为3个方向的位移矩阵, γx, b, γy, b和γz, b为插值系数, Φb为表面网格点径向基函数值φbibj=φ(‖xbi-xbj‖)组成的矩阵, 具体形式如下
|
求解方程组(6)得到权重系数后, 将空间网格点坐标代入(7)式中, 即可得到空间网格点位移
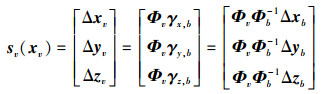
|
(7) |
则新网格点的坐标即可通过网格点位移加上初始网格坐标得到。
1.3 初始桨叶外形及参数化变量优化选用的初始构型为某客机的风洞实验模型, 螺旋桨直径D为0.737 m, 为真实模型的1/6, 如图 1所示。为了实现变形, 布置了由8个与叶尖端面平行的截面组成的控制框。从叶根到叶尖, 8个截面分别位于r/R=0.225, 0.315, 0.45, 0.586, 0.721, 0.811, 0.901和1.0的展向位置处。设计的控制框如图 2所示。

|
| 图 1 初始螺旋桨 |

|
| 图 2 包含初始叶片的控制框 |
在叶片变形过程中, 中间6个截面分别以当地翼型弦线中点为中心沿弦线方向放缩, 和以中心在螺旋桨旋转轴上投影点与中心的连线为旋转轴旋转。优化共有12个设计变量, 即为各个截面的放缩因子和扭转角。为了验证方法的可行性, 随机生成设计变量数值, 对控制框和叶片进行扰动。图 3为变形前后控制框的对比图, 实线和球体表示初始控制框的边线和节点, 虚线和八面体表示变形后控制框几何。图 4为变形前后叶片的几何对比图, 图 4a)为初始叶片, 图 4b)为变形后叶片。

|
| 图 3 变形后控制框和初始控制框对比 |

|
| 图 4 变形后叶片与初始叶片对比 |
螺旋桨的气动性能通过多重参考坐标系(multiple reference frame, MRF)方法评估, 该方法可以模拟涉及相对运动的流动, 具有较高的模拟精度[21]。旋转参考系中的Navier-Stokes如(8)式所示
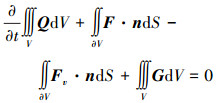
|
(8) |
式中, Q, F, Fv和G分别为守恒变量、无黏通量、黏性通量和源项。具体形式如下

|
式中:ρ和E为流体密度和总能;u, v和w分别为旋转坐标系下绝对速度的3个分量;q和qb为绝对速度和坐标系运动速度;ω和p为角速度矢量和压力;nx, ny和nz为绝对坐标系下坐标轴方向的单位向量;τij为黏性应力张量;k和T为热传导系数和温度。
本文使用SST湍流模型, 基于MRF方法求解雷诺平均Navier-Stokes方程来模拟流场。图 5给出了螺旋桨气动评估的计算域、边界条件设置及近壁面网格示意图, 整个计算区域由旋转域和静止域组成。为了降低计算成本, 计算区域设为直径为23.3D的圆柱体的六分之一, 在计算域的两侧设置旋转周期边界。

|
| 图 5 计算区域、边界条件及近壁面网格 |
本文采用Hanson等[22]提出的厚度和载荷噪声预测方法进行噪声求解。在2017年, Kotwicz等[16]对比早期的螺旋桨噪声预测模型, 其中包括采用FW-H方程的噪声预测方法, 发现在预测纯音噪声峰值时, 计算成本相对较小的Hanson模型计算得到的多个算例与实验值的平均误差最小, 约有7.2 dB, 适合应用于设计及优化研究工作中。
本文根据文献[23]对NASA的SR-2螺旋桨进行几何造型, 表 1给出了定义SR-2螺旋桨的弦长、扭转角和翼型, 其中扭转角为各个剖面桨叶角与基准桨叶角的差值,取75%位置处翼型桨叶角为基准,其数值为21°。成型后的模型如图 6所示, 其桨直径为0.591 m。数值模拟采用海平面高度下的大气参数, 设置来流马赫数为0.18, 螺旋桨转速为8 200 rev/min。其桨尖马赫数约为0.77。
| 展向位置/% | 扭转角/(°) | 翼型系列号 | 展向位置/% | 弦长/直径 |
| 0.0 | 23.7 | NACA 65-(-2.2)20 | 0.0 | 0.151 |
| 24.0 | 23.7 | NACA 65-(-2.2)20 | 24.0 | 0.151 |
| 25.0 | 21.3 | NACA 65-(-2)15 | 30.0 | 0.152 |
| 27.5 | 18.6 | NACA 65-010 | 40.0 | 0.152 |
| 30.0 | 16.6 | NACA 65-107 | 50.0 | 0.152 |
| 35.0 | 13.6 | NACA 16-105 | 60.0 | 0.152 |
| 40.0 | 11.8 | NACA 16-203 | 70.0 | 0.149 |
| 50.0 | 8.5 | NACA 16-203 | 75.0 | 0.148 |
| 60.0 | 5.0 | NACA 16-203 | 80.0 | 0.145 |
| 70.0 | 1.7 | NACA 16-102 | 85.0 | 0.140 |
| 80.0 | -1.7 | NACA 16-102 | 90.0 | 0.133 |
| 90.0 | -4.6 | NACA 16-102 | 92.5 | 0.127 |
| 100.0 | -6.8 | NACA 16-102 | 95.0 | 0.117 |
| —— | —— | —— | 97.5 | 0.103 |
| —— | —— | —— | 99.0 | 0.087 |
| —— | —— | —— | 100.0 | 0.053 |

|
| 图 6 构建的NASA SR-2模型 |
采用RANS方法进行气动计算。将RANS方程计算得到的叶片表面网格格心处的定常压力、速度、网格单元格心坐标、单元面积及网格单元法矢作为Hanson噪声模型的输入, 评估了文献中各个监测点的噪声值。图 7为不同噪声求解器及实验得到的噪声指向性, 图中星形为Hanson噪声模型计算结果, 其气动数据通过叶素动量理论获得; 三角形为Smart Rotor计算结果, 采用势流和自由涡方法进行气动计算, 采用FW-H方程进行噪声求解; 方形为STAR-CCM+商业软件计算结果, 采用URANS计算流场, 采用FW-H方程进行噪声求解[16]; 圆形为实验结果, 菱形为本文结合RANS和Hanson模型计算得到的结果。本文计算得到的指向性与文献Hanson模型存在一定的偏差, 这是因为本文采用的Hanson模型输入为精度更高的定常RANS方程计算结果, 而文献中采用的是有诸多假设的叶素动量理论。本文计算结果与其他求解器相当甚至更优, 且与实验相符较好, 这说明采用的噪声评估手段具有一定的可信度, 可以应用于优化设计中。

|
| 图 7 不同噪声求解器及实验得到的噪声指向性 |
为考虑螺旋桨前后多个监测点叶片通过频率(blade passing frequency, BPF)的噪声值, 在直径为5D的半圆上等距选取50个监测点, 如图 8所示。50个监测点BPF的声压级通过(9)式叠加得到优化中判断螺旋桨噪声性能的指标
|
(9) |

|
| 图 8 监测点位置示意图 |
式中,Li为第i个监测点处的声压级。
2.3 基于Kriging代理模型的NSGAII算法本文采用NSGAII算法进行优化搜索, 该算法由Deb在Srinivas和Deb提出的NSGA算法[25]基础上发展而来[25]。
考虑到优化过程中大量的气动性能和噪声评估成本, 采用拉丁超立方方法随机生成涉及几何变形的12个设计变量的初始种群, 并对初始种群的个体进行气动和噪声评估, 构建设计变量、推力系数、功率系数和(9)式所示的声压级样本, 继而利用该样本训练Kriging代理模型。为了提高代理模型预测的精度, 每代挑选出Pareto前缘上一定数目的个体进行数值计算并加到训练样本中重新训练代理模型。当校验点数小于Pareto前缘个体数时, 优先选取拥挤度较大的个体。反之, 则在下一个非支配等级上选取。图 9为本文优化设计的框架。

|
| 图 9 优化流程图 |
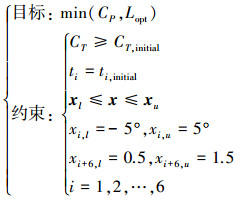
考虑气动与噪声性能的螺旋桨多目标优化设计问题可描述为
|
(10) |
式中:CT, initial和ti, initial分别为初始构型单个叶片的推力系数和各个展向截面处翼型的最大厚度;x为设计变量, 其上下限分别记作xl和xu。(11)式给出了单个叶片推力系数、功率系数和效率的计算公式, 其中n, λ, V和ρ分别为单位时间内转数、前进比、来流速度和密度。表 2给出了数值模拟的参数。

|
(11) |
| 参数名 | 数值 |
| 高度/m | 0 |
| 前进比 | 1.734 |
| 来流马赫数 | 0.2 |
| 来流密度/(kg·m-3) | 1.225 |
| 来流静温/K | 288.15 |
| 转速/(r·s-1) | 53.28 |
| 来流静压/Pa | 101 325 |
优化收敛后, 将样本点和每代重新计算的个体组合成新的种群, 对该种群进行非支配关系排序, 确定种群的Pareto前缘, 如图 10所示。图中菱形的可行解为满足约束的个体, 小号方形的不可行解为违反推力约束但相对于初始构型的绝对误差在0.001以内的个体, 大号方形点为初始构型, 实线为Pareto前缘。从图 10a)中, 可以看到Pareto前缘位于初始点的下方, 相比于噪声上的收益, 气动性能提升较小, 这也说明初始构型具有较好的气动特性。

|
| 图 10 可行解、不可行解、初始值及Pareto前缘分布图 |
从Pareto前缘上挑选出气动性能最优、噪声性能最优和兼顾两者的个体, 分别记为A、B和C, 如图 10b)所示, 同时记初始构型为D。表 3给出了4个构型的计算结果。
| 标号 | CP | CT | Lopt/dB | η/% |
| A | 0.081 31 | 0.038 61 | 110.94 | 82.345 |
| B | 0.081 63 | 0.038 61 | 110.34 | 82.012 |
| C | 0.081 97 | 0.038 62 | 110.26 | 81.705 |
| D | 0.081 34 | 0.038 61 | 111.12 | 82.310 |
从表 3中可以看到, 构型A对比构型D, 噪声降低了0.18 dB, 效率提高了0.03%, 气动与噪声性能提升较低, 这是因为初始构型气动性能较优, 难以优化得到在气动及噪声性能上都有明显提升的构型。构型B和C气动性能略有降低, 但气动效率降低不超过0.7%, 此时噪声指标分别降低了0.78 dB和0.86 dB。相对于气动性能, 噪声性能是本文更关心的指标, 所以允许较小的气动性能损失来换取更好的噪声特性。图 11给出了构型A, B, C和D厚度噪声、载荷噪声和总噪声的指向性图, 其中横坐标为监测点偏离来流方向的角度。

|
| 图 11 构型A, B, C和D的噪声指向性 |
从图 11中可以看到, 对比初始构型D, 构型A, B和C的噪声值在螺旋桨前后大多数监测点处都有下降, 降噪量依次递增。对比图 11a)~11c)的噪声值, 可以发现载荷噪声是主要的噪声源, 构型A, B和C虽然多数监测点处载荷噪声有所降低, 但降低量较小, 厚度噪声降低明显。图 12给出了各个构型对比构型D在监测点处的降噪量。从图 12中可以看到, 优化构型B和C大多数监测点的厚度噪声降噪量在1.5 dB以上, 最大降噪量近2 dB, 如图 12a)所示。多数监测点的载荷噪声降噪量约为0.5 dB左右, 最大降噪量约0.8 dB, 如图 12b)所示。从图 12c)中可以看到, 构型B和C大多数监测点的总噪声降低在0.5 dB以上, 构型C在螺旋桨正前方监测点的降噪量可达1 dB, 构型B可达0.8 dB, 构型A约为0.25 dB。

|
| 图 12 构型A, B, C和D各个监测点相对于构型D的降噪量 |
为了进一步分析噪声下降的原因, 图 13给出了构型A, B, C和D各个剖面处的翼型, 除叶根和叶尖外的7个翼型分别通过圆柱面与桨叶相交得到。

|
| 图 13 构型A, B, C和D翼型对比 |
从图 13中可以看到, 构型B和C剖面翼型弦长减小, 扭转角增大。Hanson[26]曾提出在不考虑厚度分布的情形下, 环向截面处翼型辐射的厚度噪声近似与tbBD2成正比, 其中tb为翼型最大厚度与弦长的比值, BD为弦长与螺旋桨直径的比值。因为优化保证翼型的最大厚度不变, 所以厚度噪声近似与弦长成正比。因此, 优化构型B和C的厚度噪声有显著的降低, 如图 12a)所示。同时为保持足够的推力, 各个剖面的扭转角增大补偿弦长减小导致的推力损失。构型A几何变化类似, 但是翼型弦长和扭转角变化相对较小。
4 结论本文基于NFFD方法、Hanson噪声模型等方法, 建立了考虑气动性能与噪声性能的螺旋桨优化设计框架。采用该优化框架对某民航客机螺旋桨进行了优化设计, 得到以下结论:
1) 基于NFFD方法和RBF方法可以有效地实现螺旋桨外形参数化和网格生成。
2) Hanson噪声模型可以以较低的计算成本, 很好地预测螺旋桨的纯音噪声, 适合应用于螺旋桨的工程设计及优化问题。
3) 基于Kriging代理模型与NSGAII算法建立的从Pareto前缘挑选个体重新训练代理模型的优化框架具有较高的优化效率, 大大降低了优化成本。
4) 综合噪声性能较好的优化构型特征为:螺旋桨桨叶各个剖面弦长减小, 降低厚度噪声; 扭转角增大, 以保证足够的推力, 同时改变叶片载荷分布, 降低载荷噪声。厚度噪声的降噪量更为显著。然而, 优化选取的螺旋桨和计算状态下, 载荷噪声为主要噪声源, 厚度噪声相对较小。后续可以考虑针对载荷噪声, 减小弦长扰动范围, 对各个剖面翼型及扭转角进行优化设计。
| [1] | PAGANO A, FREDERICO L, BARBARINO M, et al. Multi-Objective Aeroacoustic Optimization of an Aircraft Propeller[C]//12th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, 2008 |
| [2] | MARINUS B G, ROGER M, VAN DEN BRAEMBUSSCHE R A, et al. Multidisciplinary Optimization of Propeller Blades: Focus on the Aeroacoustic Results[C]//17th AIAA/CEAS Aeroacoustics Conference, 2011 |
| [3] | CANARD-CARUANA S, LE TALLEC C, BEAUMIER P, et al. ANIBAL: a New Aero-Acoustic Optimized Propeller for Light Aircraft Applications[C]//19th AIAA Aviation Technology, Integration and Operations Conference and Aircraft Noise and Emisions Reduction Symposium, 2010 |
| [4] |
王博, 招启军, 徐国华. 悬停状态直升机桨叶扭转分布的优化数值计算[J]. 航空学报, 2012, 33(7): 1163-1172.
WANG Bo, ZHAO Qijun, XU Guohua. Numerical Optimization of Helicopter Rotor Twist Distribution in Hover[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(7): 1163-1172. (in Chinese) |
| [5] |
招启军, 蒋霜, 李鹏, 等. 基于CFD方法的倾转旋翼/螺旋桨气动优化分析[J]. 空气动力学报, 2017, 35(4): 544-553.
ZHAO Qijun, JIANG Shuang, LI Peng, et al. Aerodynamic Optimization Analyses of Tiltrotor/Propeller Based on CFD Method[J]. Acta Aerodynamic Sinica, 2017, 35(4): 544-553. (in Chinese) |
| [6] |
郭旺柳, 宋文萍, 许建华, 等. 旋翼桨尖气动/降噪综合优化设计研究[J]. 西北工业大学学报, 2012, 30(1): 73-79.
GUO Wangliu, SONG Wenpeng, XU Jianhua, et al. An Effective Aerodynamic/Acoustic Optimization of Blade Tip Planform for Helicopter Rotors[J]. Journal of Northwestern Polytechnical University, 2012, 30(1): 73-79. (in Chinese) |
| [7] |
朱正, 招启军. 低HSI噪声旋翼桨尖外形优化设计方法[J]. 航空学报, 2015, 36(5): 1442-1452.
ZHU Zheng, ZHAO Qijun. Optimization Design Method for Rotor Blade-Tip Shape with Low HIS Noise Character[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(5): 1442-1452. (in Chinese) |
| [8] | GUTIN L. On the Sound Field of a Rotating Propeller[R]. NACATM-1195, 1948 |
| [9] | DEMING A F. Noise from Propellers with Symmetrical Sections at Zero Blade Angle[R]. NACA TN-679, 1937 |
| [10] | GARRICK L E, WATKINS. A Theoretical Study of the Effect of Forward Speed on the Free-Space Sound-Pressure Field around Propellers[R]. NACA Report 1198, 1953 |
| [11] | ARNOLDI R A. Propeller Noise Caused by Blade Thickness[R]. United Aircraft Corporation Research Department Report R-0896-1, 1956 |
| [12] | ARNOLDI R A. Near Field Computations of Propeller Blade Thickness Noise[R]. United Aircraft Corporation Research Department Report R-0896-2, 1956 |
| [13] | BARRY F W, MAGLIOZZI B. Noise Detectability Prediction Method for Low Tip Speed Propellers[R]. Hamilton Standard Division TR-71-37, 1971 |
| [14] | HANSON D B. Helicoidal Surface Theory for Harmonic Noise of Propellers in the Far Field[J]. AIAA Journal, 1980, 18(10): 1213-1220. DOI:10.2514/3.50873 |
| [15] | HANSON D B. Sound from a Propeller at Angle of Attack:a New Theoretical Viewpoint[J]. Proceedings of the Royal Society of London. Series A:Mathematical and Physical Sciences. |
| [16] | KOTWICZ H M T, FESZTY D, MESLIOUI S A, et al. Applicability of Early Acoustic Theory for Modern Propeller Design[C]//23rd AIAA/CEAS Aeroacoustics Conference, 2017 |
| [17] | KOTWICZ H M T, FESZTY D, MESLIOUI S A, et al. Evaluation of Acoustic Frequency Methods for the Prediction of Propeller Noise[J]. AIAA Journal, 2019, 57(6): 2465-2478. DOI:10.2514/1.J056658 |
| [18] | SEDERBERG T W, PARRY S R. Free-Form Deformation of Solid Geometric Models[C]//Proceedings of the 13th Annual Conference on Computer Graphics and Interactive Techniques, 1986: 151-160 |
| [19] | LAMOUSIN H J, WAGGENSPACK JR W N. NURBS-Based Free-Form Deformations[J]. IEEE Computer Graphics and Applications, 1994(6): 59-65. |
| [20] | BOER A D, VON DER SCHOOT M S, BIJL H. Mesh Deformation Based on Radial Basis Function Interpolation[J]. Computers & Structures, 2007, 85(11): 784-795. |
| [21] |
徐家宽, 白俊强, 黄江涛, 等. 考虑螺旋桨滑流影响的机翼气动优化设计研究[J]. 航空学报, 2014, 35(11): 2910-2920.
XU Jiakuan, BAI Junqiang, HUANG Jiangtao, et al. Study of Aerodynamic Optimization Design of Wing under the Interaction of Propeller Slipstream[J]. Acta Aeronauticaet Astronautica Sinica, 2014, 35(11): 2910-2920. (in Chinese) |
| [22] | HANSON D B, PARZYCH D J. Theory for Noise of Propellers in Angular Inflow with Parametric Studies and Experimental Verification[R]. NASA CR-1993-4499, 1993 |
| [23] | HAMBREY J. Computational Aeroacoustic Prediction of Propeller Noise Using Grid-Based and Grid-Free CFD Methods[D]. Ottawa, Carleton University, 2016 |
| [24] | SRINIVAS N, DEB K. Multi-Objective Function Optimization Using Non-Dominated Sorting Genetic Algorithms[J]. IEEE Trans on Evolutionary Computation, 1995, 2(3): 221-248. |
| [25] | DEB K, PRATAP A, AGARWAL S, et al. A Fast and Elitist Multiobjective Genetic Algorithm:NSGA-Ⅱ[J]. IEEE Trans on Evolutionary Computation, 2002, 6(2): 182-197. DOI:10.1109/4235.996017 |
| [26] | HANSON D B. Influence of Propeller Design Parameters on Far-Field Harmonic Noise in Forward Flight[J]. AIAA Journal, 1980, 18(11): 1313-1319. DOI:10.2514/3.50887 |
