

2. 西北工业大学 软件学院, 陕西 西安 710072
安全性是民用飞机设计首要考虑因素, 而飞控系统是保证飞机安全的关键系统, 其设计优劣直接影响飞机的飞行安全和操纵品质。作动系统作为飞控系统的关键子系统, 它直接影响操纵面的可用与否。对于电传飞控作动系统余度配置, 现代民用飞机主要是采用二余度或三余度作动器的形式来提高飞控系统的安全性和可用性。作动器数量的增加使得飞控系统须面对同一操纵面余度作动器采用主-备还是主-主驱动的决策问题。对于主-备驱动, 单个作动器具有驱动舵面的能力, 因而重量和体积相对较大, 但不涉及力纷争问题; 而主-主驱动, 各作动器重量和体积相对较小, 但可能由于作动器输出力不一致产生力纷争导致主舵面梁结构疲劳损伤等问题。
针对力纷争问题, Salman IJAZ等[1-5]从理论上提出了不少力纷争减缓控制算法。文献[1]提出基于分数阶模型, 通过2个PID和1个PI控制器同时结合Nelder-Mead优化算法对控制器参数进行优化来解决力纷争; 文献[2]设计了小脑神经网络控制器增加了控制器的稳定性; 文献[3]采用PID控制器来减缓力纷争。由于这3种控制策略均引入了微分环节, 不可避免地引入噪声信号。文献[4]缺少对动态力纷争的研究。文献[5]在进行力纷争建模中将2个作动器与舵面的连接刚度等效, 实际工况是不相等, 同时也只是对静态力纷争进行了研究。
基于此, 本文结合真实飞机的物理模型, 通过AMEsim仿真软件对某型飞机作动系统进行建模仿真[6], 验证设计的力纷争均衡控制律算法的可行性, 为后期的地面台架力纷争均衡试验提供设计依据。
1 作动系统物理模型等效转换某型飞机操纵面由2台电液伺服作动器(EHSA)主-主驱动, EHSA两端分别以铰链形式与固定翼后梁连接支座和操纵面大梁连接支座连接。从结构角度而言, 影响作动系统性能的主要因素是作动器固定端支撑刚度, 输出端连接刚度与阻尼, 作动器之间的扭转刚度, 舵面转动惯量等。通过对作动系统物理模型的分析, 可将作动系统简化为图 1形式。

|
| 图 1 双余度作动系统等效原理图 |
图 1中, K1, K2是作动器支撑刚度, K3, K4是作动器与操纵面连接刚度, Kt是两作动器输出端之间的结构扭转刚度, C1, C2为作动器输出端与连接支座间的阻尼系数, J为舵面转动惯量, F为舵面气动载荷, F1, F2表示舵面转动惯量和气动载荷等效作用到作动器输出端载荷。X1, X2表示作动筒因支撑刚度的存在而发生的位移, X3, X4表示活塞杆位移。
2 作动系统数学建模要建立完整的双余度作动系统数学模型[7]应对各个环节进行逐层分析建模。作动器1和2为可互换的外场可更换单元, 其闭环传递函数完全等价, 因而可只对作动器1进行研究。本文通过对典型电液伺服作动器各个环节[8]的具体分析, 推导其数学模型。
2.1 作动器动力学方程作动筒力平衡方程:

|
(1) |
对(1)式进行拉氏变换得
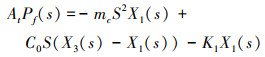
|
(2) |
活塞力平衡方程

|
(3) |
对(3)式进行拉氏变换得

|
(4) |
式中:mc为作动筒筒体质量;mt为活塞以及活塞杆质量;C0为液压缸活塞与负载运动的黏性阻尼系数;Pf为负载压差;At为作动筒活塞有效面积。
2.2 作动系统位置闭环控制方程 2.2.1 输入指令偏差方程

|
(5) |
式中:e表示伺服放大环节输入信号;Ui表示飞控计算机发出的控制指令;Uf表示活塞杆线位移传感器反馈电压。
2.2.2 伺服放大环节伺服放大包括2部分内容:①电压电流放大系数Ki;②伺服闭环系统前向增益。

|
(6) |
式中,Ii表示伺服放大输出电流。
2.2.3 电液伺服阀数学模型电液伺服阀的传递函数取决于动力元件液压固有频率的大小。当伺服阀频宽与液压固有频率相近时, 伺服阀可近似看成二阶振荡环节; 当伺服阀的频宽大于液压固有频率时, 伺服阀可近似看成惯性环节; 当伺服阀的频宽远大于液压固有频率时, 伺服阀可近似看成比例环节[9]。
对于一般飞机作动系统而言, 伺服阀使用频率为314 rad/s左右, 作动系统液压固有频率ωh为282 rad/s左右, 因而可将其看成二阶振荡环节, 即
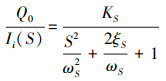
|
(7) |
式中:Q0表示伺服阀空载流量;KS表示伺服阀流量对控制电流的增益;ωS表示伺服阀固有频率;ξS表示伺服阀相对阻尼系数。
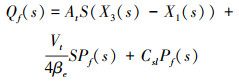
2.2.4 液压缸数学模型带载时液压缸流量方程为:

|
(8) |
式中:Qf表示作动器的负载流量; Kc表示伺服阀的流量压力系数。
液压缸流量连续方程为

|
(9) |
对(9)式进行拉氏变换得
|
(10) |
式中:Vt表示作动筒有效容积;βe表示油液的等效容积弹性模数;Csl表示作动筒总泄露系数。
在求解活塞杆运动位移X3的过程中, 由于支撑刚度K1而产生的位移量X1相对活塞杆位移较小, 因而可认为X1的值近似为零。根据公式(4)、(8)、(10)消去中间变量, 推导液压缸活塞杆输出传递函数为
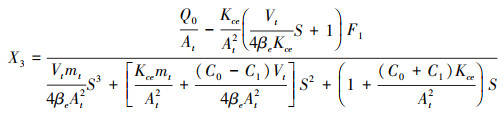
|
(11) |
式中:Kce=Kc+Kcl。
2.2.5 活塞杆位移传感器数学模型

|
(12) |
式中:Kf表示位移传感器反馈系数;X(s)表示活塞杆位移。
3 作动系统AMEsim建模与仿真 3.1 控制律设计在实际工程应用中, 从安全性角度出发, 应优先考虑成熟可靠的控制律。因而可考虑惯性积分均衡控制和PI控制算法。对于惯性积分均衡控制, 其控制框图如图 2所示。

|
| 图 2 惯性积分控制框图 |
惯性积分均衡控制机理是两作动器压差之差DDP作为惯性环节的输入, 得到力均衡指令, 但由于均衡指令跟踪系统压差DDP, 在系统前向通道中存在积分环节, 均衡指令稳态值为DDP的值, 从而导致惯性均衡控制算法存在稳态误差。因而本文仅研究PI控制算法对作动器力纷争均衡的减缓效果, PI控制框图如图 3所示。

|
| 图 3 PI力纷争均衡控制框图 |
PI控制模型中应用了比例放大和积分环节使单个压差接近平均压差。积分环节用于减少各种输人响应的稳态误差, 同时使力纷争均衡指令输出趋于稳定; 比例放大环节用于补偿压力的快速变化; 死区环节是为了当DDP较小时不进行压差均衡; 均衡指令前的限幅环节主要出于舵面限偏考虑。
3.2 作动系统AMEsim建模根据作动器位置闭环伺服控制模型, 通过AMEsim仿真软件搭建的作动器闭环伺服控制及力纷争均衡模型如图 4所示。

|
| 图 4 双余度作动器力纷争均衡模型 |
图 4中, 作动器1和2均采用1.793×107 Pa供油和1.379×106 Pa回油压力。两作动器输出端通过刚性连接, 舵面用质量块模拟, 气动载荷作用在质量块上。各作动器压差ΔP与目标均值求差后经死区环节再进行PI控制, 输出指令与飞控计算机指令叠加限幅后作为位置闭环控制系统的输入。
3.3 主要仿真参数的选取某型飞机作动系统主要参数如表 1所示。
| 主要参数 | 数值 |
| K1/(N·m-1) | 3.989×107 |
| K2/(N·m-1) | 3.620×107 |
| K3/(N·m-1) | 1.705×107 |
| K4/(N·m-1) | 1.596×107 |
| Kt/(N·m-1) | 2.959×107 |
| C1/(N·m-1·s) | 1.58×107 |
| C2/(N·m-1·s) | 1.64×103 |
| J/(kg·m2) | 0.445 |
| mt/kg | 1.792 |
| mc/kg | 8.468 |
| At/mm2 | 1 318.8 |
| C0/(N·s·m-1) | 850 |
某型飞机电传飞控系统力纷争设计需求是静态力纷争小于6.895×105 Pa, 动态力纷争小于3.447×106 Pa。由于舵面转动惯量相对于作动器输出力和气动载荷而言可以忽略, 因而仿真研究时只考虑气动载荷影响。
3.4.1 力纷争均衡控制律静态仿真模拟飞机在地面, 无气动载荷, 输入阶跃信号, 研究系统响应。仿真时间设置为5 s, 仿真步长为0.05 s。仿真开始时2个系统的外部输入指令均为0 V, 0.5 s时作动系统1外部输入指令变为4 V, 作动系统2外部输入指令变为1 V, 分别对2种情形进行仿真, 未启用PI控制仿真结果如图 5至6所示, 启用PI控制仿真结果如图 7至8所示。

|
| 图 5 作动器位移(未启用PI) |

|
| 图 6 作动器纷争力(未启用PI) |

|
| 图 7 作动器位移(启用PI) |

|
| 图 8 作动器纷争力(启用PI) |
由静态仿真结果可知, 当不启用PI控制律时, 2个系统的静态纷争力大小为3.313×107 Pa, PI控制律的启用使两个作动系统之间的力纷争最终减小为70 Pa, 满足系统设计指标。
3.4.2 力纷争均衡控制律动态仿真分析模拟飞机在空中, 输入正弦信号, 研究系统响应。仿真时间设置为3 s, 仿真步长为0.05 s。仿真开始时作动器1外部输入指令为0.1 V, 0.5 Hz正弦波; 作动器2外部输入指令为0.4 V, 0.5 Hz正弦波; 1.5 s时施加1t的气动载荷。分别对2种情形进行仿真, 未启用PI控制仿真结果如图 9至10所示, 启用PI控制仿真结果如图 11至12所示。

|
| 图 9 作动器位移(未启用PI) |

|
| 图 10 作动器纷争力(未启用PI) |

|
| 图 11 作动器位移(启用PI) |

|
| 图 12 作动器纷争力(启用PI) |
由动态仿真结果可知, 当不启用力均衡控制律时, 2个系统的纷争力大小峰值为5.800 5×106 Pa, 力均衡控制律的启用有效减小了2个作动系统之间的动态力纷争, 使力纷争峰值减小为1.288 9×106 Pa, 满足系统动态力纷争均衡指标。
4 结论本文通过对某型飞机作动系统物理架构的具体分析和作动系统位置闭环伺服控制数学建模, 结合飞控系统设计需求并通过AMEsim工程仿真软件对提出的力纷争均衡控制算法进行仿真验证, 可以得到以下结论:
1) 主-主式作动系统力纷争产生的主要原因是余度作动器输入指令的差异所致。
2) 提出的PI控制律力纷争均衡算法可以有效的使静态力纷争降低到70 Pa, 使动态力纷争峰值减小为1.288 9×106 Pa, 均满足飞控系统设计需求, 验证了PI控制算法的可行性。
| [1] | IJAZ Salman, YAN Lin, HAMAYUN Mirzatariq. Fractional Order Modeling and Control of Dissimilar Redundant Actuating System Used in Large Passenger Aircraft[J]. Chinese Journal of Aeronautics, 2018, 31(5): 1141-1152. DOI:10.1016/j.cja.2018.03.002 |
| [2] |
陈佳, 袁朝辉, 诸渊博. 飞行器稳定性控制方法设计[J]. 计算机仿真, 2017, 34(5): 39-43.
CHEN Jia, YUAN Zhaohui, ZHU Yuanbo. Control Method Design of Aircraft Stability[J]. Computer Simulation, 2017, 34(5): 39-43. (in Chinese) DOI:10.3969/j.issn.1006-9348.2017.05.009 |
| [3] | ZHANG Ying, YUAN Zhaohui. Control Strategy of Aileron's Force-Fight[J]. International Journal of Control and Automation, 2014, 19(2): 321-334. |
| [4] |
范殿梁, 付永领, 郭彦青, 等. 非相似余度作动系统动态力均衡控制策略[J]. 北京航空航天大学学报, 2015, 41(2): 234-240.
FAN Dianliang, FU Yongling, GUO Yanqing, et al. Dynamic Force Equalization for Dissimilar Redundant Actuator System[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(2): 234-240. (in Chinese) |
| [5] |
付永领, 齐海涛, 王利剑, 等. 混合作动系统的工作模式研究[J]. 航空学报, 2010, 31(6): 1177-1184.
FU Yongling, QI Haitao, WANG Lijian, et al. Research on Operating Modes in Hybrid Actuation Systems[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(6): 1177-1184. (in Chinese) |
| [6] |
齐海涛, 滕雅婷. 双余度电静液作动器力均衡控制[J]. 北京航空航天大学学报, 2017, 43(2): 270-276.
QI Haitao, TENG Yating. Force Equalization Control for Dual-Redundancy Electro-Hydrostatic Actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(2): 270-276. (in Chinese) |
| [7] |
张家盛, 牟瑾刚, 高亚奎. 飞机舵面余度作动系统建模与仿真分析[J]. 计算机仿真, 2016, 33(7): 153-157.
ZHANG Jiasheng, MU Jingang, GAO Yakui. Modeling and Simulation Analysis of Redundant Actuator System of Aircraft's Control Surface[J]. Computer Simulation, 2016, 33(7): 153-157. (in Chinese) DOI:10.3969/j.issn.1006-9348.2016.07.032 |
| [8] |
关景泰, 温济全. 机电液控制技术[M]. 上海: 同济大学出版社, 2003.
GUAN Jingtai, WEN Jiquan. Electromechanical and Hydraulic Control Technology[M]. Shanghai: Tongji University Press, 2003. (in Chinese) |
| [9] |
宋志安, 曹连民, 黄靖, 等. MATLAB/Simulink与液压控制系统仿真[M]. 北京: 国防工业出版社, 2012.
SONG Zhi'an, CAO Lianmin, HUANG Jing, et al. MATLAB/Simulink and Hydraulics Control System Simulation[M]. Beijing: National Defense Industry Press, 2012. (in Chinese) |
2. School of Software, Northwestern Polytechnical University, Xi'an 710072, China
