

2. 国防科技大学 空天科学学院, 湖南 长沙 410073
有人/无人机协同作战是指在信息化、网络化及体系对抗环境下, 有人机与无人机联合编队实施协同攻击的作战方式[1]。该作战形式是潜在的第六代穿透型战机发展方向之一[2], 美国于2015年提出“忠诚僚机”计划[3], 并于2017年利用有人战斗机和由F-16改装的无人机验证了系统对地打击的效能[4]。为提高有人/无人机系统中有人机的生存能力和作战效能, 进而保证整个系统的飞行安全, 研究三维空间内的实时避障技术是十分重要的。
交互避障法是目前最常用的一种在线避障的方法, 其主要包括势能域法、几何引导法。几何引导法又包括威胁锥法[5-6]、速度障碍物法[7-8]和几何微分法[9]等。由于速度障碍物法更为适用于复杂环境下的多障碍物避障, 且对计算要求不高, 因此该方法受到了广泛关注。
文献[10]根据机器人和障碍物的实时状态量, 采取传统的速度障碍法对动态环境下的机器人进行航迹规划; 文献[11]改进了速度障碍法, 着重考虑了“潜在危险障碍”的影响和多障碍避障的问题; 文献[12]提出了二维平面内的选择速度障碍法, 不足之处在于未考虑外部障碍对系统中飞机的影响; 文献[13-14]分别将速度障碍法运用到二维空间内多机同构系统躲避机动障碍和三维空间内单机躲避非机动障碍中。
综上, 将现有的速度障碍法运用到有人/无人机协同系统中仍有一定的难度。本文以传统速度障碍法为基础, 提出一种有人/无人机协同系统的三维实时避障方法, 其思想是将三维空间离散成若干避障平面, 通过设定系统遭遇机动障碍时的通行法则, 选择飞行模式, 进而确定最佳的避障平面以实现有人机与无人机的协同避障。
1 三维速度障碍法建模 1.1 传统速度障碍法传统速度障碍(velocity ostacle, VO)法建立在二维空间内, 将飞机视为一质点, 根据已知的飞机和障碍物S之间的相对大小关系对S进行“膨化”处理, 利用半径r作为表征S膨化量的指标。
设飞机与S的飞行速度分别为Vo和Vs, 位置向量分别为Xo和Xs, 依据威胁锥理论[5], 当飞机与S的相对速度VR位于威胁锥内时, S被视为威胁障碍。在此基础上, 沿Vs方向移动威胁锥, 得到速度障碍锥VO, 其原理图如图 1所示。图中, 下标i, j=1, 2, 3…, 分别表示飞机和障碍物的标号; Ds为飞机与S的矢量距离(绝对值为ds), 该量可实时获取; 由于锥的高度不定, 因而用波浪线的形式表示其不断延伸的底边, 后图同理。为成功避障, 应保证Vo矢量的终端位于VO之外, 即Vo∉VO。

|
| 图 1 二维速度障碍锥原理图 |
下面将传统VO法拓展到三维中。首先, 将S由平面圆转换为一个球体, 相比转换为柱体或锥体, 球体可以较好地模拟飞机等机动性较强的动态障碍物, 且对系统中不同来向的飞机具有同等的威胁。
其次, 确定构成三维VO的3个重要参数, 即锥顶点位置向量Avo、锥的半顶角αvo、飞机到基准平面Pvo的矢量距离Dvo(绝对值为dvo)。具体模型如图 2所示。图中已出现的变量的物理含义与图 1保持一致; 坐标系o-xyz表示飞机i的机体坐标系; Pvoij是球Sj与VOij相内切的圆截面, 半径记为rvoij。

|
| 图 2 三维速度障碍锥原理图 |
结合可探测获取的S相对于飞机的俯仰角θ、偏航角ψ, 可计算出上述参数, 如(1)式所示

|
(1) |
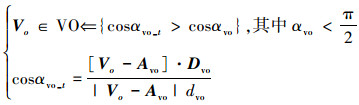
通过比较αvo_t与αvo的大小, 可判断飞机沿Vo飞行是否会与S发生碰撞, 其中αvo_t是VR与VO轴线所夹的角度。当下式成立时, 飞机需进行避障
|
(2) |
飞机在飞行过程中探测到的动态障碍, 例如有人操纵的敌机以及系统中突然改变航迹的无人机等, 均具有一定机动能力, 如按照非机动避障, 则可能发生碰撞。
设飞机所携的距离探测设备每隔Δt的时间进行一次测量, 在Δt内, 具有机动性的障碍可能以Vs为基准发生机动(考虑偏航和俯仰2个自由度), 机动区间为[-ω·Δt, ω·Δt], 其中ω为其最大机动角速度; 则以Avo为球心, 可确定一个半径为rm的机动球, 记作Mvo; 进而沿Dvo向量的反方向移动VO, 直到Mvo正好内切于新的VO, 记此时的VO为VO+。
图 3为VO+在纵截面内生成的原理图, 图中A′voij和A″voij为偏航自由度上的临界机动点。

|
| 图 3 考虑障碍机动性的速度障碍锥 |
与VO相同, VO+的构建也需要1.2节提到的3个参数, 而这些参数均可通过VO中已知的参数推导出来, 无需增加新的未知变量, 因此该方法具有一定的可行性。
利用相似三角形的原理, 可得出VO+中的参数αvo+, Avo+和Dvo+, 其计算如(3)式所示

|
(3) |
式中, rm, dvo+的求解如(4)式所示。其原理是利用半角公式求解△XoAvoA′vo半顶角的正弦值, 再利用边角对应的几何关系求出所需变量。

|
(4) |
至此, 考虑障碍物机动性的三维速度障碍法模型已构建完毕, 下文均以VO+为模型进行研究。
2 系统实时避障航迹的生成 2.1 避障平面的划分相对于二维算法, 三维实时避障更为复杂。如果用解析法直接求解, 代数方程将十分繁琐, 甚至可能得不到解析解, 当拓展到多机系统时这一问题将更为显著。
针对该问题, 本文引入避障平面的概念。将三维空间离散成若干平面, 利用这些平面截取VO+获得平面曲线, 通过计算Vo与平面曲线的位置关系, 改变Vo的方向, 以达到避障的效果, 其中离散生成的若干平面统称为避障平面。具体流程如下:
首先, 在避障飞机的机体坐标系下, 将平面xoy绕x轴旋转, 由右手定则确定旋转的正方向, 每旋转角度φo记录一个避障平面Pa, 旋转区间为[0, π), 则共生成π/φo个避障平面; 其次, 获取VO+在避障平面Pa上的投影面VOp+, 得到Vo与VOp+中曲线的位置关系; 最后, 根据一定的法则确定出最优避障平面, 具体法则在2.2~2.3节中讨论。
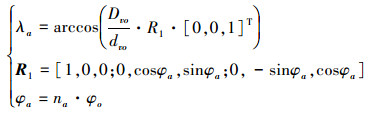
VOp+中的曲线类型由基准平面Pvo与Pa之间的夹角λa决定, 可通过计算Dvo与Pa法向量之间夹角的方式求出, 其中Pa法向量的求解用到了坐标转换矩阵R1, 具体如(5)式所示
|
(5) |
式中, na为Pa旋转φo角度的次数。当αvo+ < π/2-λa时, Pa可穿过VO+, VOp+的曲线类型为椭圆; 而当αvo+≥π/2-λa时, Pa无法穿过VO+, VOp+的曲线类型通常为双曲线, 特殊情况下还可能为三角形。后者的几何关系不适用于VO法的研究, 因此本文仅讨论VOp+的曲线类型为椭圆时的情况。
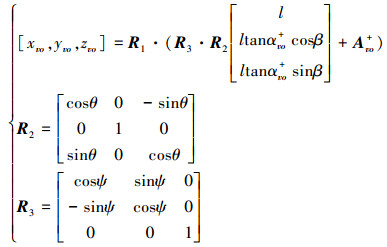
在VO+中, 设由Avo+起, 沿轴线延伸某一距离l(0 < l≤dvo), 得到平行于Pvo的平面Pl。设该平面绕轴线可旋转的角度为β(0≤β < 2π), 则在图 2所示的机体坐标系下, 通过空间内的坐标变换可得到VO+锥面上任意点的坐标[xvo, yvo, zvo], 具体通过(6)式计算
|
(6) |
式中, R1计算同式(5)。在此基础上, 为得到Pa所截得的椭圆形坐标, 应计算β取不同值时令zvo=0的l值, 通过对(6)式进行变形, 得到(7)式,进而将l带回(6)式, 得到[xvo, yvo], 即为VOp+下椭圆的坐标值。

|
(7) |
下面将上述的三维VO法拓展到有人/无人机系统中, 其关键是要确定各机在避障过程中的飞行通行权。随着飞机相对位置及速度的更新, 各机的飞行通行权也相应地更新。
目前, 在有人机编队中常采用的通行法则是“91部航空通行法则”[15]。本文针对有人/无人机协同系统的特点, 将三维空间中机间的相对位置划分为右方抵近、左方抵近和相向抵近3个区域, 并制定了一套新的通行法则以实现协同飞行, 具体如下:
1) 面对外部障碍(静态障碍和动态障碍), 系统中所有飞机均没有通行权。
2) 有人机在系统内部具有绝对的领导权, 除面对外部威胁需要躲避以外, 其面对系统内其他无人机时, 均具有飞行通行权; 当系统内的有人机数量不止一架时, 按照其在系统中的重要程度设定通行权;另一方面, 系统中各无人机地位均等, 通行权需根据机间的相对位置确定。
3) 同等地位下, 当飞机从右方抵近另一架飞机时, 抵近的飞机具有通行权, 被抵近飞机无通行权; 当飞机从左方抵近另一架飞机时, 情况相反。
4) 同等地位下, 当飞机与另一架飞机相向飞行时, 2架飞机均没有通行权。
5) 为避免多障碍物下, 同一飞机出现避障方向的矛盾, 规定系统中无通行权的飞机统一向飞行方向的右侧进行避障。
系统中机间的相对位置划分图 4如下所示。

|
| 图 4 系统中飞机相对位置划分图 |
图 4中坐标系为避障飞机的机体坐标系, 并以xoy面为标准面, 当外部机体的航向角相对于避障机体分别成[0, 2π/3], [2π/3, 4π/3], [4π/3, 2π]角度时, 其分别位于避障机体的右方抵近区域、相向抵近区域和左方抵近区域。特别地, 当外部机体的航向恰好与相对位置划分的边界重合时, 为保证飞行安全, 应令避障机体优先选择避障。
2.3 飞行模式的确定在上述通行法则的基础上, 借鉴选择速度障碍法的思想[12], 将三维VO法中飞机的飞行模式分为3种, 即任务、保持和偏转。
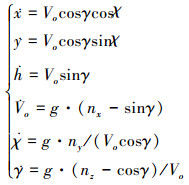
首先, 从运动学角度可对系统中有人机与无人机进行统一建模。设系统中飞机在飞行中无侧滑, 且发动机推力与飞行速度方向重合, 则飞机在三维空间内的点质量运动模型, 如(8)式所示
|
(8) |
式中:(x, y, h)表示飞机在地面坐标系下的坐标;(γ, χ)分别表示飞机的航迹倾角和航向角; Vo表示飞机地速大小, 且假设避障过程中大小保持不变; (nx, ny, nz)分别表示飞机的切向过载、水平法向过载和垂直法向过载。
针对三维VO法, 设飞机的航迹坐标系与机体坐标系重合, 在Pa面内, 飞机只通过改变面内偏航角ψp的方式进行避障, 而面内的切向过载和水平法向过载保持不变, 则运动方程在Pa面内可简化为

|
(9) |
式中, 下标p表示飞机在Pa面内的状态量。
其次, 设空间中共有N个需要躲避的障碍物, 则从降低飞机能量损耗的角度出发, 利用(10)式确定ψp, 即避障角
|
(10) |
式中:
进而, 最优避障平面Pavo可确定如下

|
(11) |
最后, 利用公式(5)~(6)将Pavo内的偏转航迹反推回惯性坐标系, 得到该飞机的(x, y, h), 并根据公式(8)解得该时刻的(θ, ψ), 显然姿态角的变化量也满足
3种模式的转换关系如图 5所示,图中, davo为设定的开始避障距离。系统完整的避障流程图如图 6所示。

|
| 图 5 3种飞行模式切换示意图 |

|
| 图 6 系统避障流程图 |
假设某机体半径为20 m的飞机正以40 m/s的速度无侧滑飞行, 其Δt=1 s, davo=300 m, 设平面内最大偏航角速度
| 障碍标号 | 距离/m | 半径/m | 姿态角/(rad) | 最大角速度/(rad·s-1) | 速度/(m·s-1) |
| 1 | 200 | 36 | π/4, π/36 | 0.1 | [-20, -10, 3] |
| 2 | 150 | 19 | π/6, π/4 | 0.1 | [0, -20, 20] |
| 3 | 180 | 17 | π/7, π/4 | 0.2 | [-15, -30, 35] |
表中, 半径为障碍机体半径, 姿态角分别为俯仰角和偏航角, 最大角速度即
首先, 由表中数据和公式(1)至(3)可知, 本机沿当前速度Vo飞行会与3个障碍物均发生碰撞。另根据ds与davo的大小关系, 可由图 5确定本机当前时刻的飞行模式为偏转模式。
其次, 确定避障平面。通过多次仿真可知, φo取值过大将无法保证避障的效果, 而取值过小则会明显延长求解的时间, 因而权衡两者关系后, 根据仿真经验取φo=π/6, 即共离散成6个避障平面, 在求解的侧重点不同时, 该取值可以相应地上下浮动, 不同φo下的仿真对比在本文中不再具体展开。针对本次仿真, 当φa取π/6和π/2时, 存在不满足式αvo+ < π/2-λa的情况, 即VOp+的曲线类型存在非椭圆。具体的避障结果如表 2和图 7所示。
| φa | λa/rad | 是否存在非椭圆 | 左侧避障角/rad | 右侧避障角/rad | 左侧避障是否受 约束 约束 |
右侧避障是否受 约束 约束 |
| 0 | 0.785 4, 1.047 2, 1.122 0 | 否 | 0.519 9 | 1.187 9 | 是 | 是 |
| π/6 | 0.950 2, 1.443 6, 1.513 6 | 是 | - | - | - | - |
| 2π/6 | 1.265 9, 1.286 7, 1.229 4 | 否 | 1.204 2 | 1.007 2 | 是 | 是 |
| 3π/6 | 1.509 1, 0.911 7, 0.880 1 | 是 | - | - | - | - |
| 4π/6 | 1.151 7, 0.675 6, 0.694 0 | 否 | 1.249 3 | 0.996 0 | 是 | 是 |
| 5π/6 | 0.872 1, 0.738 9, 0.803 4 | 否 | 0.235 0 | 1.109 2 | 否 | 是 |

|
| 图 7 各避障平面的避障示意图 |
飞机为躲避各障碍物而偏转的临界速度矢量终点在图中已标出, 分别选取左右偏转最大的角度作为避障平面内的左右避障角, 并进而得到多障碍物下机体的避障速度, 具体如图 7中避障速度虚线所示; 由表中计算结果可知, 当未添加2.2节向右避障的约束时, Pavo为φa=5π/6的平面, ψp=0.235 0 rad, 向左侧避障可达到最低耗能的避障效果; 而添加向右避障的约束后, Pavo为φa=2π/3的平面, 因受
另外, 在MATLAB R2013a中运行上述过程50次(计算机配置为Intel i7处理器, 主频3.60 GHz, 内存32 G), 得到的平均解算时间为0.057 s, 可满足实时避障的要求, 也印证了φo取值的合理性。
3.2 对具有机动性的障碍物的避障效果检验假设某UAV在空中无侧滑的飞行, 在某时刻探测到一外部障碍, 其与UAV在该时刻的状态量如表 3所示(表中坐标均基于同一惯性坐标系)。
| 飞行器名称 | 位置 | 速度/(m·s-1) | 姿态角/rad | 最大角速度/(rad·s-1) | 半径/m |
| UAV | [-400, 0, 0] | 30 | -π/6, 2π | 0.15 | 25 |
| 外部障碍 | [0, 0, 400] | 50 | π/3, π | 0.40 | 25 |
另外, UAV在空域中的偏航角幅值无限制, 俯仰角幅值不超过π/3 rad, 由UAV携带的探测设备可确定davo=500 m, Δt=1 s, 且由机体半径可确定r=50 m; UAV与外部障碍的速度大小保持不变, 其他参数同3.1节。
外部障碍相对于UAV有绝对通行权, 当其具有机动性时, 可将其

|
| 图 8 障碍物姿态角变化图 |

|
| 图 9 4种策略避障的航迹变化图 |

|
| 图 10 2种策略下飞行器的机间距变化图 |

|
| 图 11 2种策略下UAV姿态角变化图 |
图 9中实心与空心球体分别表示UAV与外部障碍在不同时刻所处的位置, 球体半径即机体半径, 从图中可以看出, 利用三维VO法可实现UAV对外部障碍的躲避, 但是由于VO仅通过前一时刻障碍物的速度矢量进行计算, 避障效果相比VO+略差, 可通过图 10中局部时间段内的机间距对比图看出; 具体地, 采取VO策略避障, 在探测到障碍物后7~9 s时间内, 机间距小于设定的安全距离r, UAV将与外部障碍发生碰撞; 而采取VO+策略进行避障时, UAV与外部障碍的距离始终大于安全距离, 即成功实现了动态避障。
从图 11可看出, UAV利用2种策略进行避障时, 均能满足姿态角幅值和角速度变化约束, 其中利用VO+避障时, 偏航角与俯仰角开始变化的时刻均早于VO策略, 特别是偏航角, 其偏转早于VO策略3 s, 这对同等机动能力的无人机来说是极为关键的, 这表明VO+充分考虑了障碍物可能的航迹变化范围, 为UAV的飞行安全提供了重要保障。
3.3 有人/无人机协同系统避障效果仿真假设1架有人机与2架同构无人机UAV1、UAV2组成协同编队, 按照离线规划航迹在空中飞行。在某一时刻检测到一破坏性武器(外部障碍)正朝编队飞来, 此时各飞行器的状态量如表 4所示(基于同一惯性坐标系)。
| 飞行器名称 | 位置 | 速度/(m·s-1) | 姿态角/rad | 最大角速度/(rad·s-1) | 半径/m |
| UAV1 | [-400, 200, 0] | 30 | -π/6, 5π/3 | 0.20 | 25 |
| 有人机 | [-400, 200, 0] | 30 | -π/6, 2π | 0.20 | 25 |
| UAV2 | [-400, -200, 0] | 36 | -π/6, π/6 | 0.20 | 25 |
| 外部障碍 | [0, 0, 400] | 40 | π/3, π | 0.40 | 25 |
设各飞机携带同性能的探测设备, 与3.2节保持一致, 即davo以及Δt的取值不变, 且有r=50 m, 其他参数同3.1节; 各飞机的初始飞行模式均为“任务”, 并设该模式下各机均保持当前姿态匀速飞行。在不采取三维VO法进行避障的情况下, 各飞行器的航迹图和机间距变化图如图 12至13所示。

|
| 图 12 任务模式下编队航迹变化图 |

|
| 图 13 任务模式下各机与外部障碍的间距变化图 |
图 12中同一线型连接的球体表示编队中同一飞机每隔3 s所处的位置, 球体半径即机体半径。由图 13中可以看出, 编队若保持“任务”模式继续飞行, 有人机会与外部障碍在9~10 s时发生碰撞, 若仅为了躲避外部障碍而改变有人机的航迹, 则易导致其与编队中其他UAV发生碰撞, 因此应采用文中所述方法对编队采取动态避障。
为校验通行法则的优先级次序, 设外部障碍未发生主动机动, 且动态避障过程中各飞行器速度大小保持恒定, 姿态角幅值及φo与3.2节保持一致。截取当前时刻之后的20 s区间进行仿真分析, 结果如图 14至17, 其中每一离散时刻的平均解算耗时为0.079 s, 远小于Δt。
由图 14可知, 三维VO法使各飞行器的间距始终大于安全距离, 即能够实现动态避障; 该模型中, 外部障碍的优先级高于有人机, 同时有人机高于UAV; 由图 15可知, 外部障碍未发生机动, 有人机为躲避外部障碍做出相应机动, 2架同等地位的UAV机动最大; 结合图 16的姿态角变化图可校验这一结论, 从该图中可以看出, 各机的姿态角变化均满足幅值、角速度变化以及向右偏转避障的约束, 未出现短时间内的大幅度波动, 利于系统飞行的稳定性; 另外, 图 17中, 飞行模式1、2、3分别代表“任务”、“偏转”和“保持”模式, 各机的机动时刻点与该图所示的飞行模式变化节点一一对应, 且有人机由于通行的优先级高而早于2架UAV进入“模式3”, 从而可进一步校验通行法则的正确性和有效性。

|
| 图 14 三维VO法避障航迹的机间距变化图 |

|
| 图 15 三维VO法规划航迹的变化图 |

|
| 图 16 各飞行器的姿态角变化图 |

|
| 图 17 三维VO法规划的飞行模式变化图 |
本文利用改进的速度障碍法, 对有人/无人机协同系统三维实时避障问题进行了研究。分析和仿真结果表明:
1) 传统速度障碍物法适用于多障碍物避障, 且原理简单, 计算效率高, 可拓展到三维异构系统的避障中。
2) 利用考虑障碍物机动的三维速度障碍模型进行动态避障, 能有效提高避障水平, 保证避障机体的飞行安全。
3) 引入避障平面, 将三维避障问题进行降维, 通过避障角的比较对避障平面进行选择, 有效提高了计算效率, 适用于实时避障。
4) 有人/无人机协同系统避障的通行法则为系统避障提供指导, 有效保证了有人机的绝对领导权和安全稳定性, 利于实现协同飞行。
考虑避障平面内不同曲线类型的处理方式、加入障碍物速度机动并将所提方法利用飞行试验进行验证是下一步值得研究的内容。
| [1] |
申超, 李磊, 吴洋, 等. 美国空中有人/无人自主协同作战能力发展研究[J]. 战术导弹技术, 2018, 1: 16-21.
SHEN Chao, LI Lei, WU Yang, et al. Research on the Capability of the U.S. Manned/Unmanned Autonomous Collaborative Operations[J]. Tactical Missile Technology, 2018, 1: 16-21. (in Chinese) |
| [2] | HUMPHREYSY C J, COBBZ R G, JACQUESX D R, et al. Optimal Mission Paths for the Uninhabited Loyal Wingman[C]//16th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Reston, 2015: 2792-2802 |
| [3] | The Department of Defense of USA. Unmanned System Integrated Roadmap[R]. FY2013-2038, 2014 |
| [4] |
贾高伟, 侯中喜. 美军有/无人机协同作战研究现状与分析[J]. 国防科技, 2017, 38(6): 57-59.
JIA Gaowei, HOU Zhongxi. The Analysis and Current Situation about the United States Military Manned/Unmanned Aerial Vehicle[J]. National Defense Science & Technology, 2017, 38(6): 57-59. (in Chinese) |
| [5] | CHAKRAVARTHY A, GHOSE D. Obstacle Avoidance in a Dynamic Environment:a Collision Cone Approach[J]. IEEE Trans on Systems, Man and Cybernetics, Part A:Systems and Humans, 1998, 28(5): 562-574. DOI:10.1109/3468.709600 |
| [6] | SCHMITT L, FICHTER W. Collision-Avoidance Framework for Small Fixed-Wing Unmanned Aerial Vehicles[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(4): 1323-1329. DOI:10.2514/1.G000226 |
| [7] | ANDRIY A, ALEKSANDR V, OLEKSANDR V, et al. Improvement of the Anti Collision Method 'Velocity Obstacle' by Taking into Consideration the Pyamics of an Operating Vessel[J]. Eastern-Earopean Journal of Enterprise Technologies, 2019, 6(3): 14-19. |
| [8] | KLUGE B, PRASSLER E. Recursive Probabilistic Velocity Obstacles for Reflective Navigation[J]. Field and Service Robotics, 2006(24): 71-79. |
| [9] | MUJUMDAR A, PADHI R. Reactive Collision Avoidance of Using Nonlinear Geometric and Differential Geometric Guidance[J]. Journal of Guidance, Control, and Dynamics, 2012, 34(1): 303-311. DOI:10.2514/1.50923 |
| [10] | FIORINI P, SHILLER Z. Motion Planning in Dynamic Environments Using Velocity Obstacles[J]. International Journal of Robotics Research, 1998, 17(7): 760-772. DOI:10.1177/027836499801700706 |
| [11] |
杨秀霞, 周硙硙, 张毅. 基于速度障碍圆弧法的UAV自主避障规划研究[J]. 系统工程与电子技术, 2017, 39(1): 168-177.
YANG Xiuxia, ZHOU Weiwei, ZHANG Yi. Automatic Obstacle Avoidance Planning for UAV Based on Velocity Obstacle Arc Method[J]. Systems Engineering and Electronics, 2017, 39(1): 168-177. (in Chinese) |
| [12] | JENIE Y I, VAN KAMPEN E J, DE VISSER C C, et al. Selective Velocity Obstacle Method for Deconflicting Maneuvers Applied to Unmanned Aerial Vehicles[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(6): 1140-1145. DOI:10.2514/1.G000737 |
| [13] | SNAPE J, VAN DEN BERG J, GUY S. The Hybrid Reciprocal Velocity Obstacle[J]. IEEE Trans on Robotics, 2011, 4: 696-706. |
| [14] | CHARKRAVARTHY A, GHOS D. Generalization of the Collision Cone Approach for Motion Safety in 3-D Environments[J]. Autonomous Robots, 2012, 32(3): 243-266. DOI:10.1007/s10514-011-9270-z |
| [15] | AMDT. 14 CFR § 91.113-Right-of-Way rules: Except Water Operations[R]. National Archives and Records Administration's Office of the Federal Register, 91282, 69 FR 44880, 2004 |
2. College of Aeronautics and Astronautics, National University of Defense Technology, Changsha 410073, China
