

无人机在军民领域获得广泛的应用。固定/移动目标跟踪是无人机的重要作战任务之一。standoff跟踪模式是一种由目标的运动特性、威胁特性以及无人机机动能力、传感器探测能力等因素决定,由无人机与目标保持指定距离,并以指定速度和高度围绕目标做圆周飞行的典型目标跟踪模式[1-2]。
传统的比例导引法在工程中得到广泛应用[3-4],但基于standoff模式采用比例导引法跟踪移动目标存在滞后的问题。Lawrence等人提出了基于李雅普诺夫向量场的针对固定目标的standoff跟踪导引方法,进一步假设目标匀速直线运动,对该方法进行了补偿,提高了对移动目标的跟踪精度[5-8]。参考点导引方法具有跟踪曲线路径性能良好、易于工程实现的优势,文献[9-11]将参考点法用于无人机对曲线航路的跟踪导引。文献[12]将参考点法应用于移动目标的standoff跟踪,分析了参考点法的渐进稳定性。文献[13-16]基于参考点法,分别开展了无人机参考视线矢量长度自适应的航迹跟踪方法研究、复杂形状航迹跟踪方法研究、障碍规避制导律设计、融合反馈信息的制导律设计等。文献[17]针对参考点方法存在的参考视线与相对速度方向夹角需要保持为锐角的问题,提出了参考点法快速进入圆形期望航迹的策略。
基于传统参考点导引方法standoff模式进行目标跟踪,当无人机相对目标速度方向与无人机在圆形期望航迹上对应点的切线方向夹角η2接近90°,且接近期望航迹时,存在无人机收敛到圆形期望航迹上效率不高的问题。本文根据线性化参考点法跟踪圆形期望航迹的小角度假设[11],设计了基于参考点法的无人机standoff跟踪固定/移动目标机动飞行进入导引策略。仿真验证了该策略的有效性,使无人机能快速收敛到跟踪目标的圆形期望航迹上。
1 参考点法standoff模式导引模型 1.1 参考点导引方法概述参考点法的定义如图 1所示,在期望航迹上选择一个虚拟目标点作为参考点,并使用该参考点生成侧向加速度指令[11]。具体地,以无人机质心为圆心,以参考视线矢量L1的长度为半径作圆, 该圆与期望航迹交点中位于无人机前方的点即为参考点, 无人机被引导以跟踪期望航迹。图 1中无人机水平飞行速度为V; 无人机侧向加速度指令为a; 无人机导引飞行转弯半径为RL; 无人机水平速度矢量和参考视线矢量L1间的夹角为η, 参考点为Pr。

|
| 图 1 参考点导引方法示意图 |
根据图 1所示几何关系, 无人机侧向加速度为
|
(1) |
上述制导律适合于跟踪曲线路径。如果无人机跟踪圆形期望航迹, 则由系统产生的加速度指令a与此时无人机圆周运动的向心加速度相同。由于在制导律中使用的角度η包含即将到来的路径的信息, 所以该几何参数具有前馈控制的效果[9]。
将无人机跟踪移动目标的参考点方法, 与现有的standoff跟踪模式结合, 可以较好地实现对移动目标的跟踪[12], 如图 2所示。

|
| 图 2 无人机standoff模式跟踪移动目标示意图 |
其中r为无人机到目标的距离, R为圆形期望航迹半径。以正北方向为参考, 顺时针为正, 无人机水平速度矢量的方向角为ψ; 目标速度矢量的方向角为ψt; 目标速度为Vt。
由文献[12], 无人机standoff跟踪固定目标的偏航角速率公式可表示为

|
(2) |
无人机跟踪移动目标时的偏航角速率
|
(3) |
(3) 式中无人机相对目标速度为Vr。当Vt=0时, (3)式即化简为(2)式, 跟踪固定目标是跟踪移动目标的特殊情形。
1.2 线性化的参考点法standoff跟踪模型目标静止时, 参考点法standoff目标跟踪相当于无人机的期望航迹为圆形[11], 图 3为无人机跟踪圆形期望航迹情形。图 3中无人机当前位置为点A, 圆形期望航迹圆心为点O, AO连线在圆形期望航迹上的交点为点Pc, 无人机到圆形期望航迹侧向偏差为d。η为无人机水平速度矢量和参考视线矢量L1之间的夹角, η1为无人机参考视线矢量和PcPr连线的夹角, η2为无人机水平速度方向与圆形期望航迹上Pc点切线方向的夹角, η3为PcPr连线与圆形期望航迹上Pc点切线方向的夹角。

|
| 图 3 参考点法跟踪圆形期望航迹示意图 |
由文献[11]得

|
(4) |
|
(5) |
假设η1和η2为小角度, 但η3不一定是小角度

|
(6) |
由η1和η2的小角度假设得
|
(7) |
由(4)式到(7)式可推得跟踪圆形航迹的几何关系为
|
(8) |
当Vt≠0时, 无人机standoff模式跟踪移动目标的几何关系由(8)式得
|
(9) |
式中,Vr为无人机相对于目标的速度。
基于线性化参考点法standoff模式跟踪目标导引策略的设计, 需要考虑满足η1, η2的小角度假设条件, 避免无人机收敛到圆形期望航迹导引效率不高的问题。
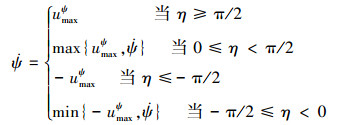
2 参考点法standoff跟踪目标策略 2.1 基于线性化参考点法standoff跟踪固定目标导引策略设计由文献[17], 无人机基于参考点法的跟踪固定目标的偏航角速率策略为
|
(10) |
(10) 式中无人机水平速度矢量方向角ψ以正北方向为参考, 顺时针为正; η为无人机水平速度矢量和参考视线矢量L1之间的夹角, umaxψ为无人机最大偏航角速率。
文献[17]中无人机从远距离处接近目标, 基于参考点导引方法standoff模式进行目标跟踪, η角接近0°, 且无人机相对目标速度方向与无人机在圆形期望航迹上对应点的切线方向夹角η2接近90°, 存在无人机收敛到圆形期望航迹上效率不高的问题。
针对上述问题, 根据线性化参考点法跟踪圆形期望航迹的小角度假设, 使用参考点法前需要限制无人机进入圆形航迹初始条件。假定无人机定高飞行, 无人机从远距离接近目标, 给出如图 4所示的无人机standoff跟踪静止目标导引策略。

|
| 图 4 参考点法跟踪静止目标导引策略示意图 |
图 4中无人机当前位置为A; Rm为无人机以最大偏航角速率转弯时的转弯半径; r为无人机到目标的距离; 
1) 当无人机与目标距离满足r≥d1条件时, 导引无人机沿目标方向接近期望航迹, 导引策略为

|
(11) |
式中,θ为无人机到目标连线的方向角。
2) 当无人机与目标距离满足r < d1条件时, 导引无人机按最大偏航角速率转弯, 导引策略为

|
(12) |
3) 当无人机与目标距离满足R+L1/2 < r≤R+L1, 且|ψ-χ|≤ε条件(其中ε假定为接近于零的小角度值), 或当无人机与目标距离满足r≤R+L1/2条件时, 使用参考点方法实现对静止目标的standoff跟踪, 导引策略为

|
(13) |
上述策略保证了使用参考点方法前, 无人机到圆形期望航迹的侧向偏差d满足d<L1, 且无人机当前速度方向与无人机与圆形期望航迹圆心连线在圆形航迹上交点的切线方向夹角η2为小角度。
2.2 基于线性化参考点法standoff跟踪移动目标导引策略设计在跟踪静止目标导引策略的基础上, 假设目标做匀速直线运动, 在导引策略中对导引律进行补偿。假定无人机定高飞行, 无人机从远距离接近目标, 无人机standoff跟踪移动目标导引策略示意图如下, 其中Vt为目标速度大小。
无人机从远距离处接近目标, 基于参考点导引方法绕顺时针方向standoff跟踪移动目标导引策略设计如下。

|
| 图 5 参考点法跟踪移动目标导引策略示意图 |
1) 当无人机与目标距离满足r≥d1-Vt×t2条件时, 导引无人机沿目标直线运动的轨迹飞行, 使无人机接近目标。需要在航段AB内补偿航段BC中无人机调整进入圆形期望航迹角度的时间里, 目标向前运动的距离, 导引策略为

|
(14) |
式中,t2为无人机在航段BC飞行的估计时间, 计算公式如下

|
(15) |
2) 当无人机与目标距离满足r < d1-Vt×t2条件时, 导引无人机按最大偏航角速率转弯, 导引策略为
|
(16) |
3) 当无人机与目标距离满足R+L1/2<r≤R+L1, 且|ψ-χ|≤ε条件时, 或当无人机与目标距离满足r≤R+L1/2条件时, 使用参考点方法实现对移动目标的standoff跟踪, 导引策略为

|
(17) |
无人机当前最大偏航角速率转弯时的转弯半径Rm和当前圆形期望航迹半径R确定以后, 按照导引策略步骤3)中给出的策略, 在线估算出无人机在BC弧段的飞行时间t2。上述策略保证了使用参考点方法前, 无人机到圆形期望航迹的侧向偏差d满足d < L1, 且无人机当前与目标相对速度方向与无人机与圆形期望航迹圆心连线在圆形航迹上交点的切线方向夹角η2为小角度。令上述策略中Vt=0, 则为无人机standoff跟踪静止目标导引策略。
3 仿真与分析 3.1 线性化参考点法进入圆形航迹初始限制条件的仿真与分析利用参考点方法仿真实现了文献[17]中无人机从远距离接近目标, η角接近90°的情形, 仿真结果如图 6所示:

|
| 图 6 η接近90°时参考点法导引方法仿真结果 |
仿真条件:无人机初始坐标(x, y)=(-1 700 m, 0), 水平速度V=50 m/s, R=1 500 m, L1=300 m, ψ(0)=90°。
仿真结果显示无人机收敛到圆形期望航迹上效率不高。
下面仿真分析了无人机进入圆形航迹条件中η2角限制对参考点法跟踪移动目标结果的影响。
跟踪静止目标仿真假设条件:无人机初始坐标(-1 800 m, 0), 水平速度V=50 m/s, 圆形期望航迹半径R=1 500 m, 初始侧向偏差d=300 m, L1=300 m。无人机进入圆形期望航迹初始角度η2取[0~90°)时, η2与侧向偏差d超调值大小如下表所示。
| η2 | 0 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 89 |
| 超调值/m | 9.64 | 10.49 | 12.83 | 16.48 | 25.99 | 64.87 | 130.7 | 219.2 | 332.9 | 457 |
仿真结果显示η2角度接近90°时跟踪期望航迹的超调值较大; η2为小角度, 即无人机水平速度方向与圆形期望航迹圆心连线与圆形航迹上交点Pc的切线方向角夹角较小时超调值较小。
3.2 standoff跟踪静止目标导引策略仿真与分析跟踪静止目标仿真假设条件:仿真周期T=0.02 s, 无人机初始坐标(-6 500 m, 100 m), ψ(0)=90°, 水平速度V=50 m/s, 圆形期望航迹半径R= 1 500 m, 目标坐标(0, 0), L1=300 m, 无人机最大偏航角速率uψmax=3°/s。参考点法standoff跟踪静止目标导引策略的仿真结果如图 7和图 8所示。

|
| 图 7 参考点法跟踪静止目标导引策略仿真飞机轨迹 |

|
| 图 8 参考点法跟踪静止目标导引策略仿真侧向偏差 |
图 6中, 无人机从开始使用传统参考点法跟踪静止目标到收敛至圆形期望航迹时间为134.2 s。应用本文策略, 无人机从开始使用参考点跟踪静止目标到收敛至圆形期望航迹时间为35.7 s, 仿真结果显示该导引策略能够实现无人机快速收敛到期望航迹; 采用本文设计的机动飞行进入导引策略, 无人机初始进入圆形期望航迹角度η2较小, 因此侧向偏差超调量较小。
3.3 standoff跟踪移动目标导引策略仿真与分析跟踪移动目标仿真假设条件:仿真周期T=0.02 s, 无人机初始坐标(-6 500 m, 100 m), ψ(0)=90°, 水平速度V=50 m/s, 圆形期望航迹半径R= 1 500 m, L1=300 m; 目标初始坐标(0, 0), 目标速度为正东方向, Vt=20 m/s, 无人机最大偏航角速率uψmax=4°/s。参考点法standoff跟踪移动目标导引策略的仿真结果如图 9和图 10所示。

|
| 图 9 参考点法跟踪移动目标导引策略仿真飞行轨迹 |

|
| 图 10 参考点法跟踪移动目标导引策略仿真侧向偏差 |
应用本文策略, 无人机从开始使用参考点法跟踪移动目标到收敛至圆形期望航迹时间为79.4 s, 小于使用传统参考点法跟踪静止目标收敛到圆形期望航迹时间。仿真结果显示该导引策略能够实现无人机快速收敛到期望航迹, 以及对移动目标的持续跟踪; 采用机动飞行进入导引策略, 无人机初始进入圆形期望航迹角度η2较小, 因此侧向偏差超调量较小。
4 结论基于传统参考点导引方法standoff模式进行目标跟踪, 当无人机相对目标速度方向与无人机在圆形期望航迹上对应点的切线方向夹角η2接近90°, 且接近期望航迹时, 存在无人机收敛到圆形期望航迹上效率不高的问题。本文根据线性化参考点法跟踪圆形期望航迹的小角度假设[11], 设计了基于参考点法的无人机standoff跟踪固定/移动目标机动飞行进入导引策略。仿真验证了该策略的有效性, 使无人机能快速收敛到跟踪目标的圆形期望航迹上。
| [1] | SUJIT P B, SARIPALLI S, SOUSA B J. Unmanned Aerial Vehicle Path Following: a Survey and Analysis of Algorithms for Fixed-Wing Unmanned Aerial Vehicles[J]. IEEE Control Systems Magazine, 2014, 34(1): 42-59. DOI:10.1109/MCS.2013.2287568 |
| [2] | FREW E, LAWRENCE D. Cooperative Stand-off Tracking of Moving Targets by a Team of Autonomous Aircraft[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2005 https://www.researchgate.net/publication/268554828_Cooperative_Stand-off_Tracking_of_Moving_Targets_by_a_Team_of_Autonomous_Aircraft |
| [3] |
蔡洪, 曹渊, 胡正东. 具有终端角度约束的导引律综述[J]. 宇航学报, 2010, 31(2): 23-31.
CAI Hong, CAO Yuan, HU Zhengdong. A Survey of Guidance Law with Terminal Impact Angle Constraints[J]. Journal of Astronautics, 2010, 31(2): 23-31. (in Chinese) |
| [4] |
吴文海, 曲建岭, 王存仁, 等. 飞行器比例导引综述[J]. 飞行力学, 2004, 22(2): 1-5.
WU Wenhai, QU Jianling, WANG Cunren, et al. An Overview of the Proportional Navigation[J]. Flight Dynamics, 2004, 22(2): 1-5. (in Chinese) DOI:10.3969/j.issn.1002-0853.2004.02.001 |
| [5] | LAWRENCE D A, FREW E W, PISANO W J. Lyapunov Vector Fields for Autonomous UAV Flight Control[C]//AIAA Guidance, Navigation, and Control Conference, Reston, 2007: 78-99 |
| [6] | FREW E W, LAWRENCE D A, MORRIS S. Coordinated Standoff Tracking of Moving Targets Using Lyapunov Guidance Vector Fields[J]. AIAA Journal of Guidance, Control, and Dynamics, 2008, 31(2): 290-306. DOI:10.2514/1.30507 |
| [7] | YOON S, KIM Y. Decentralized Phase Angle Control for Standoff Tracking Using Multiple Unmanned Aircraft[C]//Internation- al Conference on Control, Automation and System, Piscataway, 2010: 2124-2127 https://www.researchgate.net/publication/251976750_Decentralized_phase_angle_control_for_standoff_tracking_using_multiple_unmanned_aircraft |
| [8] |
赵述龙, 王祥科, 张代兵, 等. 固定翼无人机曲线路径跟踪的积分向量场方法[J]. 国防科技大学学报, 2018, 40(2): 122-127.
ZHAO Shulong, WANG Xiangke, ZHANG Daibing, et al. Curved Path Following for Fixed-Wing Unmanned Aerial Vehicles Using Integral Vector Field[J]. Journal of National University of Defense Technology, 2018, 40(2): 122-127. (in Chinese) |
| [9] | DUCARD G, KULLING K C, GEERING H P. A Simple and Adaptive On-Line Path Planning System for a UAV[C]//Proceedings of the 15th Mediterranean Conference on Control and Automation, 2007: 1-7 https://www.researchgate.net/publication/224303063_A_simple_and_adaptive_on-line_path_planning_system_for_a_UAV |
| [10] | PARK S, DEYST J, HOW J P. Performance and Lyapunov Stability of a Nonlinear Path-Following Guidance Method[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(6): 1718-1728. DOI:10.2514/1.28957 |
| [11] | PARK S, DEYST J, HOW J P. A New Nonlinear Guidance Logic for Trajectory Tracking[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004: 16-19 |
| [12] |
王树磊, 魏瑞轩, 郭庆, 等. 面向机动目标跟踪的无人机横侧向制导规律[J]. 北京航空航天大学学报, 2014, 40(6): 803-809.
WANG Shulei, WEI Ruixuan, GUO Qing, et al. UAV Lateral Guidance Law for Tracking of Maneuvering Target[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(6): 803-809. (in Chinese) |
| [13] |
李樾, 陈清阳, 侯中喜. 自适应引导长度的无人机航迹跟踪方法[J]. 北京航空航天大学学报, 2017, 43(7): 1481-1490.
LI Yue, CHEN Qingyang, HOU Zhongxi. Pach Following Method with Adaptive Guidance Length for Unmanned Aerial Vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(7): 1481-1490. (in Chinese) |
| [14] |
董芳.无人机航迹跟踪技术的研究[D].南京: 南京航空航天大学, 2010 DONG Fang. Research on Path Tracking Technology of UAV[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2010 (in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1811068 |
| [15] |
魏瑞轩, 周凯, 王树磊, 等. 面向未知环境的无人机障碍规避制导律设计[J]. 系统工程与电子技术, 2015, 37(9): 2096-2101.
WEI Ruixuan, ZHOU Kai, WANG Shulei, et al. UAV Guidance Law for Obstacle Avoidance in Unknown Environment[J]. Systems Engineering and Electrocnics, 2015, 37(9): 2096-2101. (in Chinese) |
| [16] |
冒云慧.基于航迹引导的多机编队控制方法研究[D].长沙: 国防科学技术大学, 2015 MAO Yunhui, Research on UAVs Formation Flight Control Based on the Guidance of Desired Path[D]. Changsha: National University of Defense Technology, 2015 (in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-90002-1017834938.htm |
| [17] |
赵长春, 梁浩全, 祝明, 等. 基于改进RPG方法的MUAVs协同目标跟踪[J]. 航空学报, 2015, 37(5): 1644-1656.
ZHAO Changchun, LIANG Haoquan, ZHU Ming, et al. MUAVs Coordinated Standoff Target Tracking by Improved RPG Method[J]. Acta Aeronautica et Astronautica Sinica, 2015, 37(5): 1644-1656. (in Chinese) |
