



目前降落伞被广泛应用于航空航天回收领域。为此,国内外开展了众多关于降落伞的研究。其中文献[1]对降落伞的气动特性进行了研究,文献[2]对降落伞的结构模型进行了研究,文献[3-4]中分别提出2种建立航天器伞降回收动力学模型的方法,文献[5-6]分别采用牛顿-欧拉方程和凯恩方程建立了无人机伞降回收六自由度动力学模型。
虽然航天领域伞降回收动力学模型较为成熟,但是对于无人机伞降回收系统而言,其回收物飞行速度低、回收降落伞阻力面积小,因此无人机气动力和力矩对无人机伞降回收系统的影响较大,其与航天器回收仍有较大不同。在这种情况下,为了更为精确地引入降落伞与无人机之间的相互影响,建立更高精度的无人机伞降回收动力学模型,本文主要对以下问题进行了研究:①由于无人机与降落伞通过吊带柔性连接,如何采用数学模型建立降落伞与无人机之间的相互约束,建立更高自由度的无人机伞降回收动力学模型,进而更为精确地引入降落伞和无人机之间的相互影响,值得研究。②在无人机的伞降回收过程中,无人机的气动力和力矩将对无人机伞降回收系统产生较大影响,因此如何建立无人机由小迎角过度到大迎角的非定常气动力模型值得研究。为了解决上述问题,以无人机的伞降回收系统为研究对象,通过吊带弹性系数与吊带伸长量的乘积得到吊带的约束拉力,通过ONERA方程[7]建立无人机大迎角情况下的非定常气动力模型,最终基于牛顿-欧拉方程建立该无人机伞降回收十二自由度模型。
1 伞降回收运动学描述 1.1 回收系统简介该无人机伞降回收系统主要由无人机、降落伞和吊带三部分组成,其中吊带与无人机之间,吊带与降落伞之间均为球接。无人机与吊带的连接点记为B, 降落伞与吊带的连接点记为A, 分别选取无人机质心b, 降落伞与吊带连接点A以及降落伞质心d作为坐标原点, 建立各坐标系, 选取Fe作为基准坐标系, 具体如图 1所示。

|
| 图 1 伞降回收系统坐标系示意图 |
本文所建模型实质为十五自由度模型, 其中降落伞六自由、吊带三自由度(只包含吊带姿态)以及无人机六自由度。需要注意的是吊带的三自由度是由连接点A(即坐标系Fc)的姿态来体现的。但当降落伞拉直后, 吊带姿态与降落伞姿态可以近似成一样进行处理, 因此消去了吊带的三自由度模型, 将其称为十二自由度模型。系统广义坐标选取如下

|
(1) |
式中:rd描述的是降落伞的质心位置; qd描述的是降落伞的姿态; qc描述的是吊带的姿态; rb描述的是无人机的质心位置; qb描述的是无人机姿态。需要强调的是, 由于降落伞拉直后, 吊带的姿态角和角速度可以看成是与降落伞一致的, 故后文中的Cec(由吊带坐标系向基准坐标系的转换矩阵), pc, qc, rc(吊带坐标系相对于基准坐标系的角速度分量)都可以通过降落伞的姿态角和角速度得到。
2 伞降回收动力学描述 2.1 降落伞动力学描述对降落伞由完全拉直到稳定下降过程进行动力学建模, 通过划分降落伞阻力面积的大小范围将一次性张满降落伞的充气过程划分为三部分, 即降落伞初始充气部分、降落伞主充气部分和降落伞稳定下降部分, 具体如图 2所示。

|
| 图 2 降落伞充气过程示意图 |
具体通过表 1对一次性张满降落伞的充气过程进行划分。
表中:SCA为降落伞的实时阻力面积, 其会随着充气时间而发生变化; SCA1为降落伞初始充气部分结束时的降落伞阻力面积; SCAs为降落伞充气完成时的阻力面积。
借用降落伞阻力面积的变化对降落伞不同阶段所受气动力和力矩进行描述, 首先得到降落伞阻力面积随充气时间的变化关系式为[8]
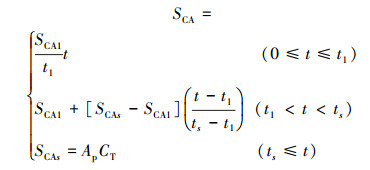
|
(2) |
式中:t1为初始充气部分花费时间; ts为主充气部分花费时间; t为降落伞充气时间; Ap为降落伞名义面积; CT为降落伞轴向力系数。
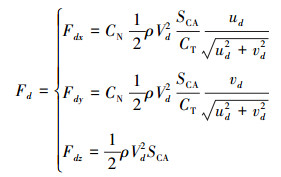
将公式(2)中得到的降落伞阻力面积SCA带入公式(3)至(4)建立降落伞从完全拉直到稳定下降阶段的气动力和力矩模型分别为[8]
|
(3) |

|
(4) |

|
(5) |

|
(6) |
式中:Lm为参考长度, 由力矩系数CM来确定; Dp为降落伞名义直径; CN为降落伞法向力系数; αd为降落伞迎角; βd为降落伞侧滑角; ud, vd, wd为降落伞质心速度分量。
2.2 无人机动力学描述ONERA方程目前主要用于气弹领域, 根据文献[9]中的介绍, ONERA方程同样可以用于大迎角情况下的非定常气动力建模。因此无人机在伞降回收过程当中的非定常动力学模型可依据ONERA方程所得到的气动力系数随迎角的变化关系式进行建立。首先给出无人机气动力模型为

|
(7) |
式中:Vb为无人机质心合速度; S为无人机机翼面积; β为侧滑角; CL, CD, Cyβ为气动力系数。
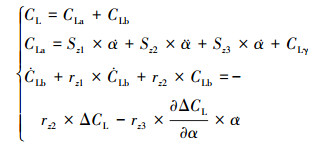
接下来给出根据ONERA方程所建立的无人机气动力系数随无人机迎角变化的关系式, ONERA方程的升力系数模型具体形式如下[10]
|
(8) |
式中:α为无人机迎角; CLa, CLb为升力系数的组成部分; ΔCL为线性部分与非线性部分的差值; CLγ为非线性部分的气动升力系数; 参数rz1, rz2, rz3需要通过雷诺数进行确定; 由于ONERA方程的线性部分是对Theodorsen气动力模型的拟合, 由此可以得到参数sz1, sz2, sz3的值。
同样可以得到ONERA方程线性部分与非线性部分的差值ΔCL为

|
(9) |
通过(9)式可以得到
同理给出阻力系数的公式为

|
(10) |
式中:CDa, CDb为阻力系数的组成部分; ΔCD为线性部分阻力系数与非线性部分阻力系数的差值; rD1, rD2, rD3同样由雷诺数确定。由于无人机在伞降过程当中, 大迎角的变化对侧向力系数CYβ影响不大, 因此侧向力系数采用准定常方法进行求解。
关于无人机所受力矩也可分为大迎角和小迎角情况, 其中小迎角所受力矩可采用无人机正常飞行时的力矩公式, 具体可参考文献[11]得到。大迎角力矩可采用多体动力学[12]的方法进行求解, 即将无人机划分为多刚体系统。无人机质心力矩由两部分组成, 一部分是各刚体质心广义力相对于无人机质心的力矩, 另一部分是各刚体自身运动所产生的非定常力矩, 将两者引入无人机质心进行叠加便可得到无人机大迎角情况下的力矩模型。在此直接给出无人机的力矩模型为:Mb。
2.3 吊带拉力求解首先应当求得吊带约束拉力, 如果吊带拉力已知, 分别对无人机和降落伞施加吊带拉力后, 无人机和降落伞便是独立的六自由度系统, 分别对其运用现有六自由动力学模型即可。本文通过吊带连接点的速度关系式求得吊带拉力。其中吊带与降落伞在连接点A的速度等式为
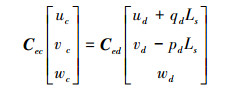
|
(11) |
式中:Cec, Ced分别表示吊带坐标系和降落伞坐标系向基准坐标系的转换矩阵; Ls为降落伞质心到吊带连接点的距离; uc, vc, wc为吊带在连接点A的速度分量; ud, vd, wd分别为降落伞质心处的速度分量; pd, qd分别为降落伞质心角速度分量。
同理可得吊带与无人机在连接点B的速度等式为
|
(12) |
式中:Ceb为无人机坐标系向基准坐标系的转换矩阵; LA为无人机质心到吊带连接点的距离; Lr为吊带长度; pc, qc为连接点A的角速度分量; 需要注意的是在公式(11)和(12)中, 当降落伞拉直后, 吊带(连接点A)的角速度和姿态是与降落伞一致的, 因此可以采用降落伞的角速度和姿态求得坐标转换矩阵Cec和角速度分量pc, qc; ub, vb, wb为无人机质心的速度分量; pb, qb为无人机质心的角速度分量。
将(11)和(12)式联立可得吊带长度变化率
吊带拉力可由公式(13)和(14)得到

|
(13) |

|
(14) |
式中:E为吊带的弹性系数, 其含义为:在弹性限度内, 单位形变量时所产生弹力的大小; Lr0为吊带初始长度; Fr为吊带拉力; FR为吊带拉力的矩阵形式。
3 伞降回收十二自由度模型建立 3.1 降落伞六自由度模型建立将吊带拉力施加到降落伞上, 可得降落伞六自由度模型形式如下

|
(15) |
式中:Cdl为降落伞气流坐标系向降落伞质心坐标系的转换矩阵; md, Jd分别为降落伞质量和转动惯量矩阵; Nd, Id分别为降落伞附加质量和附加转动惯量矩阵。Vd, ωd为降落伞质心速度与角速度矩阵; Fd, Md分别为降落伞气动力和力矩矩阵。需要注意的是降落伞的质量、转动惯量、附加质量以及附加质量惯性矩在充气阶段将随充气时间而发生变化的, 具体可参考文献[13]进行求解。
3.2 无人机六自由度模型建立无人机六自由动力学模型如下
|
(16) |
式中:Cbn为无人机气流坐标系向无人机坐标系的转换矩阵; mb, Jb分别为无人机的质量和转动惯量矩阵; Vb, ωb分别为无人机质心速度与角速度矩阵; Fb, Mb分别为无人机质心气动力和力矩矩阵。至此由(13)式、(15)式和(16)式共同构成了无人机伞降回收十二自由度模型, 可直接采用MATLAB基于四阶龙格库塔法进行数值仿真。
4 仿真实验为了验证本文模型的准确性, 采用本文所建动力学模型对文献[6]中的无人机伞降回收系统进行动力学建模, 并与文献[6]中实验数据进行对比。文献[6]中主要对无人机伞降回收进行了实验, 其中实验条件为:无人机携带降落伞, 其中降落伞向后弹出。降落伞弹出并与无人机拉直时, 无人机飞行高度56 m, 前飞速度11 m/s, 上升速度1 m/s, 实验海拔高度1 300 m, 具体仿真过程中无人机伞降回收系统的参数设定如表 2所示。
| 符号 | 物理意义 | 数值 |
| mb/kg | 无人机质量 | 10 |
| S/m2 | 无人机机翼面积 | 2.5 |
| md/kg | 降落伞质量 | 0.65 |
| (CA)s/m2 | 降落伞充气完成时阻力面积 | 25.13 |
| Lr/m | 吊带长度 | 1.8 |
| LA/m | 无人机质心到吊带连接点的距离 | 0.5 |
| LS/m | 降落伞质心到吊带连接点的距离 | 0.7 |
本文基于MATLAB进行动力学建模与仿真, 十二自由度模型初始输入为

|
六自由度模型初始输入为

|
|
需要强调的是:①实验数据是基于基准坐标系的, 因此本文仿真结果已转换至基准坐标系, 为了分析无人机伞降十二自由度模型与六自由度模型的区别, 在仿真曲线中引入无人机伞降回收六自由度模型(无人机伞降回收六自由度模型, 即基于无人机伞降系统质心建立动力学模型)进行对比。②由于十二自由度模型中, 降落伞和无人机在速度方面几乎一致, 这样不方便两者间的对比, 因此在图 3和图 5中, 十二自由度模型降落伞速度的仿真结果均乘以-1进行展示。本文仿真过程主要为降落伞刚好拉直并开始充气到降落伞和无人机一起稳定下降过程, 具体对比结果如图 3至5所示:

|
| 图 3 无人机与降落伞下降速度变化曲线 |

|
| 图 4 无人机与降落伞飞行高度变化曲线 |

|
| 图 5 无人机与降落伞前飞速度变化曲线 |
通过对图 3至5的分析可以发现:①图 3中, 虽然十二自由度模型仿真结果与实验结果的一致性较好, 但存在波动收敛的情况, 该波动产生的主要原因是:本文引入了吊带拉力, 而吊带拉力的模型中含有弹性系数, 因此会产生相应波动, 可以通过调整吊带弹性系数的大小, 来改变波动的收敛速度;②通过十二自由度模型与六自由模型以及实验数据的对比, 可以发现十二自由度模型整体变化趋势与实验数据一致, 这验证了本文模型的准确性, 并且十二自由度模型相比于六自由度模型更接近于实验数据, 其精度更高, 具体对比结果如表 3所示。
| 分类 | 无人机稳定 下降速度/ (m·s-1) | 14 s时无 人机飞行 高度/m | 无人机前飞 速度减小为 零所需时间/s |
| 实验结果 | 5.05 | 0.00 | 5.85 |
| 十二自由度模型 | 5.00 | 1.02 | 4.95 |
| 六自由度模型 | 4.95 | 2.13 | 4.50 |
通过对图 6的分析可以发现:降落伞由完全拉直到和无人机一起稳定下降的过程中, 降落伞迎角由90°逐渐变为0°, 无人机迎角由0°逐渐变为90°, 整体符合实际情况, 两者的迎角变化曲线同样可以反映两者之间的夹角变化。

|
| 图 6 无人机与降落伞迎角变化曲线 |
通过该无人机伞降回收系统的动力学建模与仿真实验可以得到如下结论。
1) 本文通过吊带弹性系数和吊带伸长量的乘积得到了吊带拉力, 并以此建立了无人机伞降回收十二自由度模型。该模型仿真结果与实验数据吻合良好, 验证了本文模型的合理性。本文十二自由度模型相比于六自由度模型, 其优势在于:精度更高, 能够引入降落伞和无人机之间的相互影响。本文模型能够为无人机的伞降回收提供更为精确的指导。
2) 本文采用ONERA方程建立了无人机由前飞过渡到与降落伞一起稳定下降阶段的非定常气动力模型, 通过该阶段仿真结果与实验数据的对比可以发现两者吻合较好, 这同样也证明了ONERA方程可用于解决无人机大迎角情况下的非定常气动力的建模问题。
3) 针对后续研究, 主要可从以下入手:①对无人机大迎角非定常动力学模型继续进行优化; ②对降落伞的弹出阶段进行动力学建模, 以完善无人机伞降回收系统动力学模型; 3)可利用该模型搭建无人机伞降回收仿真平台, 为无人机的伞降回收提供服务。
| [1] | FIELDS T D, YAKIMENKO O A. Development of a Steerable Single-Actuator Cruciform Parachute[J]. Journal of Aircraft, 2018, 55(3): 1041-1048. DOI:10.2514/1.C034416 |
| [2] | LEONARD J, ACCORSI M. Structural Modeling of Parachute Dynamics[J]. AIAA Journal, 2000, 38(1): 139-145. DOI:10.2514/2.934 |
| [3] |
张青斌, 丰志伟, 马洋, 等. 火星EDL过程动力学建模与仿真[J]. 宇航学报, 2017, 38(5): 443-449.
ZHANG Qingbin, FENG Zhiwei, MA Yang, et al. Modeling and Simulation of Mars EDL Process[J]. Journal of Astronautics, 2017, 38(5): 443-449. (in Chinese) |
| [4] | WANG Haitao. Dynamic Modeling and Simulation of Whipping Phenomenon for Large Parachute[J]. AIAA Journal, 2018, 56(10): 4049-4058. DOI:10.2514/1.J057118 |
| [5] |
郭亮, 张红英, 童明波. 无人机伞回收动力学分析[J]. 南京航空航天大学学报, 2012, 44(1): 14-19.
GUO Liang, ZHANG Hongying, TONG Mingbo. Dynamics Analysis on Parachute Recovery of Unmanned Aerial Vehicle[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2012, 44(1): 14-19. (in Chinese) DOI:10.3969/j.issn.1005-2615.2012.01.003 |
| [6] |
吴翰, 王正平, 周洲, 等. 基于凯恩方程的无人机伞降动力学建模与仿真[J]. 北京航空航天大学学报, 2019, 45(6): 1256-1265.
WU Han, WANG Zhengping, ZHOU Zhou, et al. Dynamics Modeling and Simulation of UAV Parachute Recovery Based on Kane Equation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(6): 1256-1265. (in Chinese) |
| [7] | DUNN P E, DUGUNDJI J. Nonlinear Large Amplitude Aeroelastic Behavior of Composite Rotor Blades[J]. AIAA Journal, 1992, 30(1): 153-162. DOI:10.2514/3.10895 |
| [8] |
荣伟, 包进进. 火星大气对降落伞充气性能影响的初步探讨[J]. 航天返回与遥感, 2017, 38(4): 1-4.
RONG Wei, BAO Jinjin. The Primary Studies on the Effect of Martian Atmosphere on Parachute Inflation Performances[J]. Spacecraft Recovery & Remote Sensing, 2017, 38(4): 1-4. (in Chinese) DOI:10.3969/j.issn.1009-8518.2017.04.001 |
| [9] |
常林, 刘延瑞, 徐玮, 等. 大型水平轴风力机叶片气弹稳定性研究及控制[J]. 机械设计与研究, 2018, 34(2): 199-204.
CHANG Lin, LIU Yanrui, XU Wei, et al. Research and Control of Blabe Aeroelastic Stability of Large Horizontal Axis Wind Turbine[J]. Machine Design and Research, 2018, 34(2): 199-204. (in Chinese) |
| [10] |
林学海, 任勇生. 基于ONERA气动力模型的风力机叶片颤振时域分析[J]. 山东科技大学学报, 2009, 28(3): 56-60.
LIN Xuehai, REN Yongsheng. Analysis of Flutter Time-Domain for Blades of Wind Turbine Based on the ONERA Aerodynamic Model[J]. Journal of Shandong University of Science and Technology, 2009, 28(3): 56-60. (in Chinese) DOI:10.3969/j.issn.1672-3767.2009.03.011 |
| [11] |
吴翰, 王正平, 周洲, 等. 多旋翼固定翼无人机多体动力学建模[J]. 西北工业大学学报, 2019, 5(37): 928-930.
WU Han, WANG Zhengping, ZHOU Zhou, et al. Modeling and Simulation for Multi-Rotor Fixed-Wing UAV Based on Multibody Dynamics[J]. Journal of Northwestern Polytechnical University, 2019, 5(37): 928-930. (in Chinese) |
| [12] | HOGAN F R, FORBES J R. Modeling of Spherical Robots Rolling on Generic Surfaces[J]. Multibody System Dynamics, 2015, 35(1): 91-109. |
| [13] |
郭鹏.大型降落伞开伞过程研究[D].长沙: 国防科技大学, 2012: 72-80 GUO Peng. Research on the Opening Process of Large Parachute System[D]. Changsha: National University of Defense Technology, 2012: 72-80(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-90002-1014047996.htm |
