

随着技术的不断发展, 小型无人机在军事与民用领域应用日渐广泛, 但是小型无人机由于其自身固有的尺寸限制致使在执行任务时所能携带的燃料较少, 滞空时间较短, 限制了小型无人机的应用。因此, 研究人员将目光转向了从飞行器之外获取额外能量的方法, 太阳能动力驱动与动态滑翔技术就是当前研究较为热门的能够使飞行器从外界获得额外能量进而有效提升航时与航程的技术手段。
太阳能动力驱动技术以太阳辐射作为能量来源。因其能源形式的特殊性, 太阳能飞机可以通过光电转化实现能量补充, 与现有常规飞行器相比具有明显优势, 是超长航时飞行器的重要发展方向。太阳能飞机在持久监视、预警侦察、数据中继、边界巡逻等领域拥有广阔的应用前景, 是各军事科技强国研究的重点。但是, 小型无人机由于自身尺寸限制与近地面的工作环境, 无法搭载大面积的太阳能光电转化装置与储能装置, 单纯依靠太阳能技术对其航时与航程的提高有限。为进一步提高小型无人机的滞空性能, 在使用太阳能技术的同时引入动态滑翔技术进一步提高外界能量吸收效率。
动态滑翔技术是一种新兴的适用于小型无人机的增程技术, 在不改变原有飞行器外形参数的条件下, 仅通过改变飞行控制策略即能有效吸收外界横向梯度风场能量, 减少小型无人机飞行能量消耗, 是现在国际上研究的前沿技术之一。自然界中漂泊信天翁是动态滑翔应用的典型示例, Sachs等人通过实验得出信天翁能够以81 W飞行功率, 在13.2天内不间断地从南佐治亚飞往西南太平洋, 消耗相当于5.6~11.9 L汽油的能量, 远超其自身能提供的能量[1]。动态滑翔技术的优势在于仅通过飞行控制和航迹规划修改飞行策略即可实现从梯度风场中获取能量, 和太阳能技术相结合后不会影响太阳能动力系统的布局和使用, 通过优化其飞行姿态控制, 还可以使太阳能获取能力得到增强。
近年来, 太阳能技术与动态滑翔技术都取得了新的发展。动态滑翔方面, Zhao利用NPSOL软件模拟了动态滑翔飞行器的最小燃油消耗[2], Sachs等则研究了动态滑翔所需的最小风切变[3]。Deittert等利用微分平滑方法对小型无人机动态滑翔飞行路径进行了研究[4]。国内近年对于动态滑翔的研究也取得了一定的成果, 朱炳杰等利用高斯伪谱法分析了动态滑翔最优航迹中的能量变化[5]。刘多能等利用Runge-Kutta积分方法针对不同类型的环绕形态及迁移形态的动态滑翔飞行轨迹进行了优化求解[6]。单上求等对动态滑翔飞行过程中的能量转化机理进行了研究[7]。太阳能方面, 美国密歇根大学的Spangelo等推导了太阳能飞行器的飞行动力学模型[8]; 乌克兰的Sineglazov等采用Noth提出的总体设计方法, 进行了太阳能飞行器能源系统的设计[9-10]。昌敏以翼载荷为研究对象, 对太阳能总体设计中的关键参量的进行了敏感度分析, 并提出了以能量为中心的太阳能飞机初始方案设计方法[11-12]。马东立基于重力储能原理建立了变高度轨迹各阶段及其时间节点的物理数学模型, 研究了相关总体技术参数对变高度轨迹应用效果的影响[13]。
目前关于小型无人机太阳能技术和动态滑翔技术的研究大都局限于各自技术本身, 受小型无人机尺寸与携能-载荷矛盾影响, 2种技术在应用过程中都各自具有其局限性:太阳能无人机增加携带太阳能电池板和蓄能电池与携带载荷重量矛盾, 而动态滑翔技术从风场中吸收的富余能量不易贮存, 同时要求保持周期性飞行。将2种技术相结合, 同时发挥两者的优势从外界获取能量, 动态滑翔保持周期飞行从风场中获取能量,维持飞行器飞行状态过程中太阳能系统可以贮存更多能量,以提升滞空能力, 进一步提升小型无人机的航程与航时。
本文从能量交换角度入手, 分析了采用太阳能技术与动态滑翔技术的飞行器飞行过程中的能量变化原理, 推导了结合2种获能技术的最大能量获取策略; 建立了基于梯度风场的小型无人机飞行动力学模型, 并将其与太阳能动力能源系统模型相结合, 使之能够较为准确地反映同时使用太阳能技术与动态滑翔技术飞行器的飞行特征与能量变化规律。利用能量分析得到了综合应用2种技术的飞行器最佳获能策略, 通过对比太阳能飞行器传统盘旋、纯动态滑翔飞行的飞行轨迹, 对其能量收支变化进行了深入分析研究, 证明了结合2种技术能够为小型无人机带来更大的能量优势, 对提高小型无人机的续航性能具有十分重要的意义, 为今后研究全天候不间断飞行提供了基础。
1 建模分析 1.1 太阳能动力能源系统建模太阳能飞机通过光伏电池实现光电转化, 将太阳能转化为电能, 再通过电动机将电力转化为飞行器的机械能。当获取的太阳能大于飞行所必须的能量消耗时, 可以将其以电能的形式贮存在蓄电池中。
对太阳能辐射强度进行建模[13], 太阳垂直照射强度如下:

|
(1) |
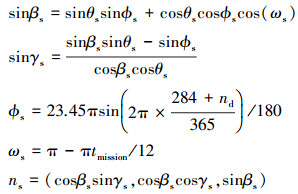
式中:I为太阳常数, 取1 367 W/m2; ε为地球偏心率, 取0.017 7;nd为一年中距离1月1日的天数。太阳辐射强度功率建模如下, 首先确定当地日-地连线矢量ns的方向
|
(2) |
式中:βs为太阳高度角;γs为太阳方位角, 以正东为0, 向南取正;ϕs为赤纬角;θs为地理纬度;ωs为太阳时角;tmission为一天中的时刻。太阳能辐射吸收效率和机翼平面的法向量nw与日地连线向量夹角ns相关, 根据几何关系, 有太阳能原始功率Psun0

|
(3) |
太阳能通过动力系统转化为机械能的功率Psun为

|
(4) |
式中:Sw为机翼面积;ηsc为光伏电池转化效率;ηasc为光伏电池铺设面积与机翼面积的比值;ηm为能源管理系统效率;ηP为推进系统效率。从公式中可以看出, 在同一次飞行中, 想要让太阳能吸收能力提高, 就应尽可能减小nw和ns之间的夹角。
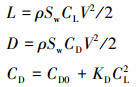
1.2 风场建模动态滑翔从侧向梯度风场中获取额外能量。侧向梯度风场广泛存在于大气中, 以水面及地面上方数十米的大气中最为典型, 处于小型无人机的主要应用范围内。反映侧向梯度风场常用的幂数模型[3]表示如下
|
(5) |
式中:HR与VR则指风场中某一代表高度与该高度下对应的代表风速; VW指风场中随不同高度h变化对应的侧向风速。指数p被称为风场强度变化指数, 表征梯度风场的变化强度, 在不同的环境下取值不同。不同p值在HR=20 m, VR=10 m/s时对风场的影响如图 1所示。

|
| 图 1 不同p值下的梯度风场模型 |
在飞行仿真过程中, 假设风场风速方向沿地轴系+X轴方向, 即文中所有风速VW均以+X轴方向为正方向。根据相关文献[4], 并综合本文研究对象应用范围, 最终选取风场强度变化指数p=0.25, 风场代表高度HR=20 m, VR=8 m/s。
1.3 动态滑翔动力学建模动态滑翔中飞行动力学模型采用的主要轴系及角的定义如图 2所示:

|
| 图 2 动力学模型角度及坐标定义 |
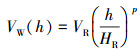
该模型在梯度风场中的飞行器动力学及运动学模型可表达为
|
(6) |
该质心动力学方程定义在航迹坐标系上。其中, ψ为飞行器航迹偏角, γ为航迹倾角, μ为航迹滚转角; V为飞行器相对地面速度, VW为对应高度下风速, 定义方向沿地轴系+X方向; L, D, T分别为升力、阻力与推力, 为简化计算推力方向假设和阻力方向一致, 均定义在风轴系中, 与图 2保持一致; (x, y, h)为飞行器在地轴系下的飞行坐标。
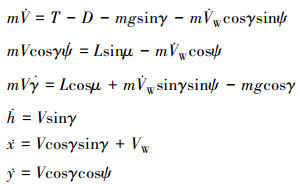
升力与阻力计算采用简化模型如下
|
(7) |
式中, CL和CD分别是升力与阻力系数, CD0为零升阻力系数, KD为诱导阻力因子。
动态滑翔数值仿真研究中常用的模型之一为Deittert等提出的小型无人机模型[3-4], 本文对其进行少许修改并将来自于文献[13]的太阳能动力能源系统与之结合, 选用修改后的模型进行计算。新模型主要参数如下:
| 参数名称 | 模型参数 |
| 质量m/kg | 5.443 |
| 翼展b/m | 4.32 |
| 机翼面积Sw/m2 | 0.957 |
| 零升阻力系数CD0 | 0.017 |
| 诱导阻力因子KD | 0.019 2 |
| 展弦比AR | 19.54 |
| 最大升力系数CLmax | 1 |
| 最大升阻比(L/D)max | 28 |
| 最大滚转角μmax/(°) | 60 |
| 光伏电池光电转化效率ηsc | 0.2 |
| 光伏电池铺设面积比ηasc | 0.8 |
| 能源管理系统效率ηm | 0.95 |
| 推进系统效率(含电机与桨)ηP | 0.72 |
应用动态滑翔技术的小型太阳能飞行器飞行过程中主要的能量获取来自经由动态滑翔从风场中获取的能量Ewind和经由太阳能动力能源系统获得的太阳能Esun; 主要的能量支出来自空气阻力带来的能量损失ED和动力系统做功消耗的能量ET, 其中ET消耗的能量会补充飞行器的机械能。
飞行器的机械能可以表示为
|
(8) |
式中, Emechnical为机械能。小型无人机在整个飞行过程中认为质量是恒定的, 保持不变, 因此, 能量相对时间的变化率表示为

|
(9) |
同时, 引入辅助公式

|
(10) |

|
(11) |
将公式(6)、(10)和(11)代入(9)式进行整理可以得到

|
(12) |
(12) 式反映了飞行器飞行过程中的能量变化规律, 式中的3项分别代表经由动态滑翔从风场中获取能量、动力系统做功、飞行过程中气动阻力消耗的能量。合理调整航迹倾角γ与航迹偏角ψ使得sinγsinψ < 0, 从而使得第一项为正, 即飞行器从风场中获取能量, 即在dVW/dh>0的风场中, 飞行器动态滑翔获能的主要飞行策略应为逆风爬升后顺风下降。因此, 通过合理的飞行控制、姿态控制及航迹规划, 能够使得飞行器在不损失机械能的条件下完成飞行, 进而提升航程或航时。

|
| 图 3 动态滑翔示意图 |
太阳能动力能源系统的能量变化规律为通过太阳能摄入能量, 通过动力系统输出能量, 为保证和机械能变化量的可对比性, 分析中采用动力能源系统输出端能量值。该能量计算如下

|
(13) |
在进行周期性盘旋飞行的过程中, 每个周期持续的时间相对于地球自转时间短得多, 可以近似认为对单个周期进行能量分析过程中ns的方向和太阳垂直照射强度I0保持不变, 因此太阳能动力能源系统的能量的变化率主要取决于机翼法向量, 当机翼法向量与太阳入射向量ns夹角越小时, 整体太阳能获能能力越强

|
(14) |

|
(15) |
因此, 为提高太阳能获取, 飞行中的姿态会使得机翼法向量更趋向于太阳入射方向, 最终使飞行轨迹所围面的中点法线更趋向于ns方向。
从能量总体收支功率角度看, 飞行过程中, 主要的能量收入为动态滑翔风场吸收能量功率Pwind和太阳能能量收入功率Psun, 主要能量支出为飞行阻力消耗功率PD和动力系统能量消耗功率PT。衡量总体能量收支变化率的最终表达式为

|
(16) |
通过能量方程的分析, 确定了结合2种技术的小型无人机飞行过程中主要的能量获取来自动态滑翔从梯度风场中获取的风能Ewind和通过太阳能动力能源系统获得的太阳能Esun。两者均与飞行姿态有关, 通过合理调整飞行器的飞行姿态, 可以最大化能量获取功率。
动态滑翔风场吸收能量功率Pwind表达式为
|
(17) |
分析Pwind表达式可以发现, 风能吸收效率与航迹倾角和航迹偏角有关, 逆风爬升和顺风俯冲过程中Pwind为正, 能够有效吸收风场能量, 反之则支出能量。当ψ=90°, γ=-45°或ψ=-90°, γ=45°时, 即飞行器沿顺风航向以45°角向下俯冲或沿逆风方向以45°角向上爬升时, 飞行器能够最大化获取梯度风场能量
|
(18) |
此时, 风场能量获取功率与风梯度dVW/dh与飞行速度有关。根据小型无人机实际飞行可能的环境, 取dVW/dh=0.2 s-1, V=21 m/s时, 风场能量获取功率与飞行姿态的关系如图 4所示。

|
| 图 4 风场能量获取功率与飞行姿态的关系 |
从图中可以看出, 风场能量获取有2个最大值, 分别对应前文分析的2种情况, 同时也有2个最小值, 分别为逆风俯冲和顺风爬升点, 符合前文对Pwind的分析。
太阳能能量获取功率Psun表达式为

|
(19) |
式中

|
(20) |
公式(19)中cos〈ns, nw〉可以展开为
|
(21) |
若公式中滚转角是一个自由变量, 当滚转角取值为

|
(22) |
选取飞行日期nd=180, 飞行时刻tmission为12时为例, 取I1=553.8 J, 太阳能获取效率Psun与飞行姿态之间的关系如图 5所示。

|
| 图 5 太阳能获取效率与飞行姿态的关系 |
图 5中可以看到, 能取得最大值的为一系列点, 反映了此时航迹倾角与航迹偏角之间的取值联系, 此时如公式(23)取
|
(23) |
则可以得到最大太阳能获取功率

|
(24) |
此时机翼法向量和太阳光照方向相同, 在不考虑其他约束的条件下, 为最大太阳能获取功率。
综合考虑2种能量吸收效率之和, 结合公式(17)和(22)可以发现, 2种能量的吸收功率均和航迹倾角与航迹偏角有关, 当滚转角取值使太阳能吸收功率最大时, 得到总能量吸收功率

|
(25) |
根据小型无人机实际飞行可能的环境, 选取dVW/dh=0.2 s-1, V=21 m/s, nd=180, tmission为12时, I1=553.8 J时, 能量吸收功率与飞行姿态之间的关系如图 6所示:

|
| 图 6 能量吸收功率与飞行姿态的关系 |
该状态在不限制滚转角的前提下, 能量吸收的最大值处更接近动态滑翔风场获能最大值处, 且偏向太阳能获取最大值点方向。主要原因在于两者取最大值的点较为接近, 而太阳能吸收功率最大值附近梯度较小。
在一天中的不同时刻, ns=(ns1, ns2, ns3)取值不同, 也会影响能量吸收功率。作上述环境下tmission分别取6时、9时、15时、18时的总能量吸收功率与飞行姿态关系图, 可以与图 6中12时结果进行对比:

|
| 图 7 一天中的不同时刻能量吸收功率与飞行姿态关系图 |
可以看到, 飞行时刻不同对能量获取功率有一定影响, 但最值仍集中在动态滑翔风场获能最大值附近, 偏向太阳能获取最大值方向。实际飞行过程中考虑飞行轨迹中的约束与控制要求, 各姿态变量不一定能够满足最大能量获取要求, 但最优姿态仍然是在满足逆风爬升与顺风俯冲条件下, 尽可能减小太阳入射向量与机翼平面法向量间的夹角。
3 仿真分析为了验证结合太阳能与动态滑翔技术的飞行器能量变化规律, 将飞行过程中的能量变化直观展现出来, 从而得到2种技术结合的能量获取优势的结论, 本文根据表 1中典型飞行器的参数, 搭建了仿真系统, 优化工具选择SNOPT, 求解软件为MATLAB, 通过最优化理论进行了仿真计算, 获得了最佳能量获取的控制和轨迹曲线, 并分析了飞行中的能量变化。优化目标为最大能量获取

|
(26) |
结合太阳能与动态滑翔飞行动力学模型表示如下

|
(27) |
式中:x=[V, ψ, γ, h, x, y]为系统的状态向量;u=[μ, CL, T]为输入控制向量。飞行轨迹离散为M个点, 每个点的状态向量可以由初始状态和飞行控制决定, 因此设计变量为
|
(28) |
|
(29) |
选取周期性环绕航迹作为目标优化路径。飞行器在完成一周期循环后应能返回初始飞行状态, 以保证该循环的可重复性。根据这一条件, 得到约束如下

|
(30) |
为保证飞行器飞行安全, 在飞行过程中还应避免飞行器及其机翼触地或没入水中, 转化为高度约束有

|
(31) |
飞行器模型采用飞行仿真中较为常用的带动力太阳能飞行器模型, 其基本参数如表 2所示。
| 初始参数名称 | 初值设置 |
| 初始速度V1/(m·s-1) | 18 |
| 初始航迹偏角ψ1/(°) | 0 |
| 初始航迹倾角γ1/(°) | 0 |
| 初始坐标(x1, y1, h1)/m | (0, 0, 12) |
| 轨迹离散点个数M | 100 |
| 飞行时长初值tf0/s | 9 |
| 代表风速值VR/(m·s-1) | 8 |
| 地理纬度θs/(°) | 45 |
| 飞行时刻tmission | 18:00 |
| 飞行日期nd/h | 180 |
表 2给出了优化初始参数设置。优化过程中, 各输入参数还需要满足飞行动力学模型的约束, 如升力和滚转角控制量需要满足CLmax和μmax的限制。同时选取夏季黄昏时间作为飞行的背景环境, 此时单纯太阳能不足以完全支撑飞行能量的损失, 选择此时刻以方便讨论太阳能和动态滑翔能量获取过程中的变化规律。仿真飞行路径结果如图 8所示。

|
| 图 8 仿真飞行路径 |
图 8中, 实线为飞行器仿真飞行轨迹, 虚线为飞行轨迹在3个主平面上的投影, 点划线为太阳入射向量, 同时在图中标注了飞行器在路径各点处的机翼平面法线向量。图中还展示了实际使用的风场形状。从图中可以看出, 经过路径的规划, 飞行器轨迹基本满足逆风爬升、顺风俯冲的动态滑翔获能基本原则, 同时路径的主要法线方向尽可能朝向日照向量方向, 满足最大获取太阳能的需求。飞行过程中的飞行速度、航迹偏角和航迹倾角如图 9所示。通过空速变化结合环绕路径, 可以看到飞行速度和飞行高度在完成一个飞行周期后均与初值保持不变, 总机械能在周期前后变化量基本为0, 即飞行器在不损失机械能的条件下完成了一个周期的环绕飞行, 执行了监视任务。对应的控制变量如图 10所示。

|
| 图 9 空速、航迹偏角、航迹倾角随时间的变化图 |

|
| 图 10 滚转角、升力系数、推力曲线随时间的变化图 |
飞行器机械能及其相关能量变化项如图 11所示。

|
| 图 11 飞行器机械能及其相关能量变化项变化 |
图中可以看到, 机械能在周期完成后变化量与初值相同, 其中通过动态滑翔吸收的风场能量是主要的机械能能量补充来源, 在能量补充中占主导地位。通过对比空速变化图可以发现, 动态滑翔能量吸收处于平台段对应速度的最低点(t≈4 s)和最高点(t≈6 s), 即对应航迹的最高点与最低点, 其余点处飞行器基本满足逆风爬升和顺风俯冲机动, 动态滑翔吸收能量得到增长。航迹最低点(t≈6 s)后, 飞行器主要处于逆风爬升段, 此段中空气阻力消耗能量增加, 同时动力系统做功也需要增加以完成最终周期闭环, 补充了部分机械能。通过机械能变化分析, 可以确定动态滑翔技术确实能够从风场中获取额外能量, 进而提升飞行器的续航能力。
总体能量收支变化如图 12所示, 仿真飞行轨迹与传统太阳能飞行器等效盘旋轨迹(等效投影面积, 等效飞行速度, 因此可能飞行周期时间不同, 两者之间能量对比时采用平均功率对比)以及无阳光照射纯动态滑翔飞行的对比航迹如图 13所示, 三者能量平均功率变化如表 3所示。

|
| 图 12 总体能量收支变化 |

|
| (opt为仿真飞行轨迹, circle为等效盘旋, DS为纯动态滑翔轨迹) 图 13 仿真飞行轨迹与其等效盘旋轨迹 |
| 平均功率 | 仿真飞行 | 等效盘旋 | 纯动态滑翔 |
| 动态滑翔风场吸收能量平均功率 | 37.76 | 0 | 50.86 |
| 太阳能能量收入平均功率 | 42.26 | 29.73 | 0 |
| 飞行阻力消耗能量平均功率 | 55.42 | 46.41 | 54.60 |
| 动力系统能量消耗平均功率 | 17.67 | 46.41 | 3.87 |
| 机械能变化平均功率 | 0.02 | 0 | 0.12 |
| 总体能量收支变化平均功率 | 6.93 | -63.09 | -7.61 |
通过对比结果可以看出, 在飞行时刻(夏季的18:00, 接近日落)太阳能通过规划仍有足够的能量吸收量, 在抵消动力系统及阻力能量损耗的同时, 仍有6.93 J/s的能量吸收功率, 蓄电池仍处于充电状态, 传统的盘旋飞行方式则需要平均每秒支出63.09 J, 纯动态滑翔飞行能量支出功率为7.61 J/s, 这部分能量需要由动力能源系统的蓄电池提供。对比仿真结果和纯动态滑翔的结果, 可以看到为了顾及太阳能的能量获取, 动态滑翔能量摄入比纯动态滑翔飞行稍小, 但结合2种方法的总能量收入功率为80.03 J/s, 比纯动态滑翔高36.5%, 比传统盘旋纯太阳能飞行能量收入高62.8%。仿真整体飞行轨迹的法线方向则更偏向于日照的方向, 这是为了获取更多太阳能同时兼顾动态滑翔获能而做出的妥协。从各方法总体能量收支变化平均功率对比结果可以看出, 结合太阳能和动态滑翔技术的飞行器从风场和太阳能中获取了更多额外能量, 能够支持更长时间的飞行, 能够有效提升飞行器的续航能力。
4 结论1) 本文从能量角度分析了用太阳能技术与动态滑翔技术的飞行器飞行过程中的能量变化原理, 分别探讨了机械能、太阳能动力能源系统以及全机总体能量收支变化的基本原理与各能量分项, 提出了表征结合2种技术的飞行器的能量收支公式, 以及太阳能和风场能量最大获取的基本飞行策略与控制策略。
2) 通过能量公式的推导与分析, 确定了动态滑翔获取风能的基本飞行策略为逆风爬升与顺风俯冲, 太阳能能量获取最佳策略在于尽可能使飞行中机翼平面法线方向与光线入射方向夹角减小。
3) 建立了基于梯度风场的小型无人机飞行动力学模型与相应的太阳能动力能源系统模型, 并依照能量分析中得到的能量收支公式与获能飞行控制策略进行了仿真验证, 验证了在日落时分环绕飞行的飞行器通过合适的飞行控制策略能够有效获得足够的额外能量支持飞行, 相较于传统的盘旋飞行和纯动态滑翔飞行能量收入功率分别提高36.5%和62.8%, 证明了结合2种获能技术能够有效提升飞行器的续航性能, 为今后进一步研究全天候不间断飞行提供了基础。
| [1] | SACHS G, TRAUGOTT J, NESTEROVA A P, et al. Flying at no Mechanical Energy Cost:Disclosing the Secret of Wandering Albatrosses[J]. Plos One, 2012, 7(9): 41449. DOI:10.1371/journal.pone.0041449 |
| [2] | ZHAO Y. Optimal Patterns of Glider Dynamic Soaring[J]. Optimal Control Application and Methods, 2004, 25: 67-89. DOI:10.1002/oca.739 |
| [3] | SACHS G, BUSSOTTI P. Application of Optimal Control Theory to Dynamic Soaring of Seabirds[J]. Variational Analysis and Applications, 2005, 79: 975-994. |
| [4] | DEITTERT M, RICHARDS A, TOOMER C A, et al. Engineless Unmanned Aerial Vehicle Propulsion by Dynamic Soaring[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(5): 1446-1457. DOI:10.2514/1.43270 |
| [5] |
朱炳杰, 侯中喜. 无人机风梯度滑翔过程中能量变化[J]. 国防科技大学学报, 2015, 37(1): 78-83.
ZHU Bingjie, HOU Zhongxi. Energy Transformation in Dynamic Soaring of Unmanned Aerial Vehicles[J]. Journal of National University of Defense Technology, 2015, 37(1): 78-83. (in Chinese) |
| [6] | LIU D N, HOU Z X, GUO Z, et al. Optimal Patterns of Dynamic Soaring with a Small Unmanned Aerial Vehicle[J]. Journal of Aerospace Engineering, 2017, 231(9): 1593-1608. |
| [7] |
单上求, 侯中喜, 朱炳杰, 等. 动态滑翔动力学建模与风梯度能量获取[J]. 国防科技大学学报, 2015(4): 45-49.
SHAN Shangqiu, HOU Zhongxi, ZHU Bingjie, et al. Dynamics Modeling of Dynamic Soaring and Energy Gaining from the Wind Gradient[J]. Journal of National University of Defense Technology, 2015(4): 45-49. (in Chinese) |
| [8] | SPANGELO S C, GILBERT E G. Power Optimization of Solar-Powered Aircraft with Specified Closed Ground Tracks[J]. Journal of Aircraft, 2013, 50(1): 232-238. DOI:10.2514/1.C031757 |
| [9] | SINEGLAZOV V M, KARABETSKY D P. Energy System Design of Solar Aircraft[C]//2013 IEEE 2nd International Conference on Actual Problems of Unmanned Air Vehicles Developments, 2013 |
| [10] | SINEGLAZOV V M, KARABETSKY D P. Flying wing Design for Solar Rechargeable Aircraft[C]//2013 IEEE 2nd International Conference on Actual Problems of Unmanned Air Vehicles Developments, 2013 |
| [11] |
昌敏, 周洲, 郑志成. 太阳能飞机原理及总体参数敏度分析[J]. 西北工业大学学报, 2010, 28(5): 792-796.
CHANG Min, ZHOU Zhou, ZHENG Zhicheng. Flight Principles of Solar-Powered Airplaneand Sensitivity Analysis of Its Conceptual Parameter[J]. Journal of Northwestern Polytechnical University, 2010, 28(5): 792-796. (in Chinese) DOI:10.3969/j.issn.1000-2758.2010.05.029 |
| [12] |
昌敏, 周洲, 李盈盈. 基于能量平衡的太阳能飞机可持续高度分析[J]. 西北工业大学学报, 2012, 30(4): 541-546.
CHANG Min, ZHOU Zhou, LI Yingying. An Effective Theoretical Analysis of Persistent Flight Altitudes of Solar-Powered Airplanes[J]. Journal of Northwestern Polytechnical University, 2012, 30(4): 541-546. (in Chinese) DOI:10.3969/j.issn.1000-2758.2012.04.012 |
| [13] |
马东立, 包文卓, 乔宇航. 基于重力储能的太阳能飞机飞行轨迹研究[J]. 航空学报, 2014, 35(2): 408-416.
MA Dongli, BAO Wenzhuo, QIAO Yuhang. Study of Flight Path for Solar-powered Aircraft Based on Gravity Energy Reservation[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(2): 408-416. (in Chinese) |
