

2. 中国直升机设计研究所, 天津 300000
所有常规直升机都需要尾桨来平衡主旋翼产生的扭矩,实现航向控制。因此, 尾桨完全或者部分失效将会对直升机造成严重的控制问题。近年来, 尾桨故障造成了相当一部分直升机事故(约占各类事故的30%), 其中包括尾桨系统故障、尾桨分离、尾桨叶片或传动轴故障等[1-2]。
直升机尾桨故障一般可以归纳为以下3类:气动故障、尾桨完全失效和尾桨距卡滞[2-4]。其中气动故障是指尾桨陷入涡环状态, 脚蹬失效。此时驾驶员可以使直升机加速前飞, 通过气流将尾桨处涡环吹走。该故障容易改出, 且发生概率较低。尾桨完全失效是指尾桨不产生侧向力, 在低中速情况下, 机身会以极大的偏航角速度加速偏转, 驾驶员需要立即进行自转着陆[3-4]。尾桨距卡滞是指尾桨距固定在当前值, 无法更改。此时直升机处于冻结状态, 任何功率、速度以及侧滑角等状态量的变化都会引起航向不稳定。在所有的尾桨故障中, 尾桨距卡滞所占比例最高, 接近2/3[4]。因此, 直升机尾桨距卡滞是国内外研究的热点之一。
近年来, 国内外针对直升机尾桨距卡滞问题做了一些研究。其中文献[3]提出了模拟各类尾桨故障的试飞与处理方法; 文献[4]主要进行了小尾桨距卡滞的着陆试飞, 并给出了不同尾桨距卡滞时的基本操纵建议; 文献[5]对机械故障造成的尾桨距卡滞提出了评估方案, 确保可以安全地进行飞行试验研究。为了降低尾桨故障的概率, 文献[6-9]研究了新的尾桨结构与传动系统。文献[10-12]发展了新的尾桨故障监测系统, 从而能快速发现并辨识尾桨故障。文献[1]对直升机各类尾桨故障(包括卡滞)后的安全飞行进行了数值仿真, 并提出了在特定飞行条件下使其重新配平的控制方案; 文献[13]提出了一种控制方法来保证无人直升机在悬停状态下尾桨距卡滞后的安全飞行; 文献[14]讨论了直升机遭遇不同尾桨距卡滞后的安全飞行问题, 并进行了驾驶员在环的飞行仿真, 使其改出至稳定飞行状态。可以看出, 目前尚未有通过数值仿真的方法研究直升机遭遇尾桨距卡滞后安全着陆的相关问题。
直升机遭遇尾桨距卡滞后的最优安全着陆问题, 可以被描述为轨迹优化问题, 即一种非线性最优控制问题。轨迹优化问题一般可以利用最优控制方法求解, 该方法可用于计算并分析直升机的最优飞行轨迹和操纵策略, 从而为飞行试验提供指导和依据[15-18]。因此, 直升机遭遇尾桨距卡滞后的最优安全着陆过程, 可以通过最优控制方法进行研究, 从而为尾桨距卡滞飞行试验提供一定的参考。
尾桨距卡滞可分为2种极端情况, 即大尾桨距卡滞与小尾桨距卡滞。在遭遇大尾桨距卡滞时, 直升机一般处于较大的功率或者较小的前飞速度状态; 而在遭遇小尾桨距卡滞时, 直升机一般处于较小功率或者经济速度状态。在着陆时, 2种尾桨距卡滞对应的着陆过程和操纵策略也会有所不同[3-4]。因此, 本文分别研究了直升机遭遇大尾桨距卡滞与小尾桨距卡滞后的最优安全着陆过程。
文章的主要内容为:首先建立适用于轨迹优化计算的直升机增广飞行动力学模型。然后, 将直升机遭遇不同尾桨距卡滞后的安全着陆问题表示成最优控制问题, 并进行数值求解。最后, 分别计算并分析样例直升机遭遇大尾桨距卡滞与小尾桨距卡滞后的最优安全着陆过程。在研究小尾桨距卡滞时, 本文还进一步讨论了在着陆阶段采用常规着陆和自转着陆方式对直升机安全性的影响。
1 飞行动力学建模本文以某型号样例直升机进行尾桨距卡滞后的最优安全着陆研究。该型号直升机为常规轻型单发单旋翼带尾桨直升机[19], 左旋旋翼质量为2 000 kg, 其基本参数见表 1。
| 参数 | 值 |
| 总质量W/kg | 2 000 |
| 旋翼半径R/m | 5.345 |
| 主桨叶片数nMb | 3 |
| 负扭θ1/° | -12 |
| 桨叶弦长c/m | 0.35 |
| 旋翼转速Ω/(r·min-1) | 386 |
| 旋翼实度σ | 0.062 |
| 旋翼方向 | 左旋 |
| 尾桨叶片数nTb | 2 |
| 平尾面积Shs/m2 | 1.265 |
| 平尾安装角ihs/° | 0 |
| 垂尾面积/m2 | 1.021 |
| 旋翼位置/m | (-0.09, 0.01, 1.53) |
| 平尾位置/m | (-4.91, 0.01, 0.01) |
| 垂尾位置/m | (-6.90, 0.00, 0.50) |
| 尾桨位置/m | (-6.35, 0.30, -0.51) |
首先给出样例直升机的刚体飞行动力学模型, 其中旋翼桨叶的挥舞运动采用二阶非定常挥舞动力学模型, 诱导速度由Pitt-Peters一阶动态入流模型描述; 旋翼桨叶剖面、机身、平尾与垂尾的气动力和力矩系数通过插值吹风试验数据得到, 并考虑气动干扰。详细的建模和验证过程见参考文献[18-20], 本文不再赘述。模型的主控方程如下

|
(1) |
式中,xb=[xF, xR, xI]T, xF为机身状态向量, xR为旋翼状态向量, xI为诱导速度状态向量; ub=[θ0, θs, θc, θt]T, θ0为旋翼桨根总距, θs为纵向周期变距, θc为横向周期变距, θt为尾桨距; t为时间。
然后, 将该模型调整为适用于尾桨距卡滞后安全着陆轨迹优化计算的飞行动力学模型。直升机尾桨距卡滞一般由2类故障引起:尾桨操纵连杆故障或者脚蹬卡滞。尾桨操纵连杆故障会断开驾驶员脚蹬与尾桨距的连接, 导致脚蹬无法操纵尾桨距; 而脚蹬卡滞(通常由尾桨操纵机构卡滞或尾助力器故障引起)则会使脚蹬不能移动, 从而使尾桨距固定[4]。可以看出, 当直升机遭遇尾桨距卡滞时, 无论由哪一类故障引起, 尾桨距都会固定在当前值, 且脚蹬都无法发挥作用。为了便于进行轨迹优化计算, 本文使用操纵量θ0, θs, θc关于时间的一阶导数作为控制变量, 则原操纵量可视为状态变量的一部分, 从而避免操纵量在数值优化过程中出现跳跃[17], 即

|
(2) |
直升机在着陆阶段会有地面效应的影响, 需要通过地面效应因子fG来修正旋翼诱导速度, fG可以表示为[18]
|
(3) |
式中,σ为旋翼实度; CT为旋翼拉力系数; a为旋翼桨叶升力线斜率; λ为旋翼入流比; R为旋翼半径; z是桨毂离地高度; μ为旋翼前进比。
当尾桨卡滞在大桨距时, 因前飞速度较小, 直升机在下降时易进入涡环状态, 造成旋翼气动力剧烈变化。为了避免进入涡环状态, 必须使旋翼和尾桨保持在涡环区域之外, 约束条件可以表示为[21]
|
(4) |
式中,μTR为尾桨前进比; λTR为尾桨入流比; ν0和ν0T分别为旋翼和尾桨的平均无量纲诱导速度; CTR为尾桨拉力系数。
当尾桨卡滞在小桨距时, 可以选择在最后阶段采用自转着陆, 此时发动机的油门关闭, 发动机出轴功率PA以及旋翼转速Ω的变化可表示为如下微分方程[17-18]
|
(5) |
式中,tp为响应时间; PMR, PTR分别为旋翼和尾桨的需用功率; η为传动效率; IMR, ITR分别为旋翼和尾桨的转动惯量; k为旋翼转速与尾桨转速的比例因子。
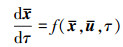
以上组成了适用于直升机尾桨距卡滞后安全着陆轨迹优化计算的增广飞行动力学模型, 其微分方程形式为
|
(6) |
式中
|
(7) |
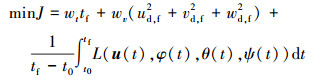
尾桨距卡滞后安全着陆对应的最优控制问题, 可以被描述为:在遭遇尾桨距卡滞后, 从一类满足可操纵性和安全性的操纵策略中找出一种可以使直升机由初始状态着陆到指定目标状态的操纵策略, 并使性能指标达到最优。该问题由优化变量、性能指标(目标函数)和约束方程组成[22]。其中优化变量为状态向量x, 控制向量u和飞行结束时刻tf(设初始时刻为0)。
由于直升机尾桨在卡滞期间无法操纵, 前飞速度、高度和需用功率的变化都会引起直升机的航向不稳定。因此, 性能指标需要考虑到直升机的姿态角变化、驾驶员的可操纵性、飞行时间和着陆触地速度等, 可定义为
|
(8) |
式中

|
(9) |
式中,ud, f, vd, f, wd, f分别为末端时刻地轴系下前飞速度、侧向速度和下降率; t0和tf为初始时刻以及末端时刻; u0max, usmax, ucmax分别为3个控制量最大值; φmax, θmax, ψmax分别为允许的最大滚转、俯仰和偏航姿态角; wt, wv, w1~w6为权重因子, 表示对应各项在性能指标中所占的比重。权重因子越高, 则对应项的优化程度越大, 因此权重因子的选择需要进行调试, 以权衡各项的影响。由于驾驶员在尾桨距卡滞的安全着陆中主要专注于对剩余3个操纵量的控制, 同时兼顾直升机姿态角的变化, 因此w1~w6可以相对大一些; 而着陆速度的限制可以在约束方程中有所体现, 且飞行时间可以适当延长, 因此wt, wv可以相对小一些。权重因子的具体数值将在算例中给出。
约束方程:假设直升机遭遇尾桨距卡滞时处于配平状态, 考虑到驾驶员从发现尾桨距卡滞到开始进行着陆操纵需要一定的延迟时间(一般为1 s), 本文将直升机遭遇尾桨距卡滞后1 s的状态量和控制量作为轨迹优化的初始边界条件。末端边界条件参考直升机适航条例[23]对安全着陆的要求确定

|
(10) |
式中,xfmin, xfmax分别为状态量在末端时刻的约束最小值和最大值, 具体数值将在算例中给出。路径约束可以表示为
|
(11) |
路径约束的确定需要考虑涡环边界(4)式、飞行任务、安全性和操纵系统特性, 具体数值将在算例中给出。
2.2 数值求解方法尾桨距卡滞后安全着陆对应的非线性最优控制问题非常复杂, 目前无法得到解析解, 本文采用以下数值解法进行求解。
为了提高数值优化计算效率, 本文对增广飞行动力学模型(6)中的状态量与控制量进行无量纲缩放(无量纲缩放过程详见文献[17])
|
(12) |
式中,x为无量纲缩放后的状态变量; u为无量纲缩放后的控制变量; τ为无量纲缩放后的时间变量。
本文采用直接多重打靶法将最优控制问题离散成非线性规划问题, 并采用稀疏序列二次规划方法进行数值求解[22]。
图 1为直接多重打靶法的离散过程原理图。

|
| 图 1 直接多重打靶法 |
如图 1所示, 将最优控制问题中的时间无量纲τ平均分为N-1段, 进而产生N个时间节点, 每一个时间节点处对应的状态变量和控制变量为

|
(13) |
在第k个时间打靶段上, 对微分方程(12)进行积分(从τk积分至τk+1), 可以得到

|
(14) |
式中
|
(15) |
在积分过程中, 控制量u(τ)通过线性插值uk与uk+1得到。
性能指标可以通过各个离散时间段表示
|
(16) |
将路径约束和边界条件作用在对应的时间节点上, 完成最优控制问题的离散过程。利用现已发展较为成熟的稀疏序列二次规划算法[24], 即可得到离散的最优解。利用线性插值后的离散最优控制量, 即可求解增广飞行动力学模型(6)从t0至tf的响应过程, 从而得到原最优控制问题的最优状态量变化。
3 大尾桨距卡滞着陆轨迹优化本节计算分析样例直升机遭遇大尾桨距卡滞后的最优着陆轨迹和操纵过程。大尾桨距卡滞一般对应于悬停、低速飞行、爬升等大功率飞行状态。在算例中, 本文假设直升机以2 m/s的低速度在标准大气环境中稳定平飞, 高度为50 m, 航迹角0°。随后尾桨突然卡滞, 尾桨距无法操纵, 驾驶员在延迟1 s后, 通过剩余的3个操纵量使直升机安全着陆。
初始边界条件为直升机发生尾桨距卡滞1 s后的状态量和控制量。考虑到安全着陆的具体要求, 确定末端边界条件如下
|
(17) |
考虑到飞行任务、安全性和操纵系统特性, 给出路径约束如下

|
(18) |
此外, 由于前飞速度较小, 直升机在快速下降时易进入涡环状态, 因此还需要加入涡环边界的约束方程(4)式, 从而避免进入涡环状态。
性能指标(8)中的权重因子经过调试确定为
|
(19) |
在本算例中, 当离散点超过30个以后, 数值仿真结果基本不再变化, 且计算效率迅速降低, 因此本文在算例中采用的离散点个数N为30。
图 2和图 3所示为样例直升机遭遇大尾桨距卡滞后的最优着陆过程, 其中ud, vd, wd为地轴系前飞速度、侧向速度和下降率, β为机身侧滑角, PR为直升机需用功率。

|
| 图 2 大尾桨距卡滞最优着陆状态量变化 |

|
| 图 3 大尾桨距卡滞最优着陆需用功率与操纵量 |
1) 在驾驶员延迟期间, 直升机处于冻结状态, 维持稳定飞行。1 s之后, 驾驶员开始操纵直升机, 首先减小旋翼桨根总距(见图 3b)), 并向前推杆通过纵向周期变距使直升机进入斜向下飞行(见图 2e))。此时, 旋翼需用功率下降(见图 3a)), 旋翼扭矩减小, 相对过大的尾桨侧向力使得直升机向右偏航(见图 2h)、图 2i)), 大角度负向侧滑飞行(见图 2j))。与此同时, 直升机在下降过程中还会出现向左横滚响应(见图 2f)), 这主要由旋翼侧倒引起。驾驶员可以通过侧滑稳定偏航角, 以及横向周期变距(见图 3c))稳定滚转角。
2) 大约4 s之后, 驾驶员逐渐增大旋翼总距, 直升机下降率减小, 需用功率上升, 旋翼扭矩增加, 偏航角速度和负向侧滑角逐渐减小, 直升机滚转姿态逐渐平稳, 并开始向右滚转。在这期间, 驾驶员通过横向周期变距(见图 3c))和纵向周期变距(见图 3d))稳定滚转角和俯仰角, 准备着陆。
3) 在着陆阶段, 驾驶员继续增大总距, 并操纵直升机稳定姿态准备以垂直方式着陆(见图 2a)、图 2b))。这是因为垂直着陆时需用功率较大, 大尾桨距有利于平衡此时的旋翼反扭矩。最后直升机基本垂直着陆(见图 2e)), 且触地时下降率接近0 m/s(见图 2c))。
4) 本节得到的最优着陆轨迹和操纵过程, 与飞行试验(文献[3-4])中对直升机大尾桨距卡滞后安全着陆提出的建议相符, 即:当尾桨卡在大桨距时, 采用大功率(小速度)就能保持方向的平衡, 可操纵总距保持方向和侧滑角直到接地。说明本节的数值仿真结果较为合理。
4 小尾桨距卡滞着陆轨迹优化本节计算分析样例直升机遭遇小尾桨距卡滞后的最优着陆轨迹和操纵过程。小尾桨距卡滞一般对应于下滑、经济速度附近的平飞等小功率飞行状态。在算例中, 本文假设直升机以30 m/s的经济速度在标准大气环境下稳定平飞, 高度为50 m, 航迹角0°。随后尾桨突然卡滞, 尾桨距无法操纵, 驾驶员在延迟1 s后, 通过剩余的3个操纵量使直升机安全着陆。
在遭遇小尾桨距卡滞时, 驾驶员可以采用侧滑方式着陆(常规着陆[4]), 或在离地高度为2~3 m时采用自转下滑的方式着陆[3]。因此, 本文对这2种方案分别进行研究讨论。
1) 常规着陆
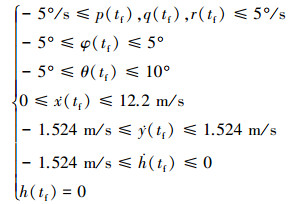
初始边界条件为直升机发生尾桨距卡滞1 s后的状态量和控制量。常规着陆时, 由于尾桨侧向力不足, 会导致触地时机体角速度较大(特别是偏航角速度r), 考虑到安全着陆要求, 本文确定末端约束如下
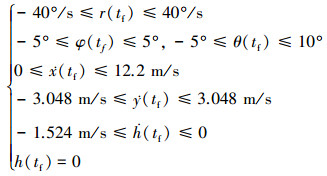
|
(20) |
考虑到飞行任务、安全性和操纵系统特性, 给出路径约束如下
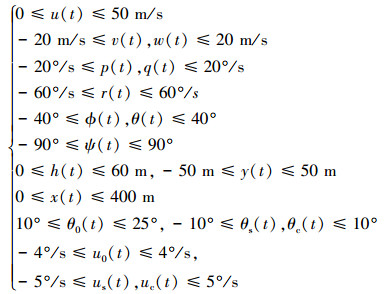
|
(21) |
权重因子与(19)式保持一致。根据分析, 在本算例中, 当多重打靶法离散点个数N设为30时, 可以保证数值优化精度以及较好的计算效率。
2) 离地3 m自转着陆
根据文献[3]的描述, 在高度约2~3 m时, 可以关闭油门进行自转着陆。自转着陆是一种复杂的紧急机动, 为了降低操纵难度, 本文假设直升机在进行自转着陆前离地高度为3 m, 且处于稳定飞行状态。
计算自转着陆过程时, 需要加入油门关闭后发动机出轴功率以及旋翼转速变化的微分方程式(5)。为了方便对比, 自转着陆的边界条件、路径约束和性能指标与常规着陆保持一致。在自转着陆过程中, 直升机可以通过旋翼所储备的旋转动能进行安全着陆。但是, 旋翼转速过高会使前行桨叶受到气流压缩性的影响, 导致阻力突增; 旋翼转速过低会引起桨叶失速, 使旋翼拉力大幅降低, 故本文对旋翼转速变化范围进行了约束。在路径约束中加入自转着陆阶段旋翼转速的约束[16]如下

|
(22) |
图 4和图 5所示为样例直升机遭遇小尾桨距卡滞后的最优常规着陆和自转着陆过程。

|
| 图 4 小尾桨距卡滞最优着陆状态量变化 |

|
| 图 5 小尾桨距卡滞最优着陆需用功率与操纵量 |
1) 对于常规着陆(实线部分), 驾驶员首先把旋翼总距降低至最小(见图 5b))以降低旋翼扭矩, 并使直升机斜向下飞行(见图 4e))。直升机下降率较大(见图 4c)), 出现向左横滚响应(见图 4f)), 驾驶员通过小幅的横向周期变距操纵稳定滚转角(见图 5c))。除此之外, 由于此时旋翼扭矩过小, 因此较小的尾桨侧向力仍会使直升机出现一定的小幅向右偏航运动(见图 4h)和图 4i))。随后, 驾驶员开始增大旋翼总距, 下降率减小, 准备着陆。在这期间, 驾驶员通过纵向周期变距(见图 5d))增大俯仰角, 使前飞速度减小至着陆允许的最大值(见图 4a)), 从而在着陆时尽量减小直升机的需用功率(即旋翼扭矩)。最后在触地前, 驾驶员过纵向周期变距降低俯仰角, 使直升机在允许的俯仰角范围内着陆(见图 4g))。此时, 侧向速度与下降率均接近0 m/s(见图 4b)和图 4c))。然而, 触地时较大的旋翼负扭仍导致偏航角速度增大至接近-30°/s(见图 4h)),容易造成危险。
2) 对于离地3 m自转着陆(虚线部分), 驾驶员在前期的操纵策略与常规着陆过程基本一致, 但幅度更小一些。因此直升机的滚转和俯仰姿态角变化更加平缓(见图 4f)和图 4g))。从图 5a)可以看出, 直升机需用功率一直保持在较低水平, 因此偏航角速度基本维持在0°/s左右(见图 4h))。在第10 s时, 直升机稳定飞行, 并保持高度3 m, 准备自转着陆。驾驶员首先关闭油门, 并通过纵向周期变距增大俯仰角, 从而进一步减小直升机前飞速度(见图 4a)), 然后逐渐降低旋翼总距使其慢慢着陆(见图 5b)), 期间继续稳定姿态。最后在触地前降低俯仰角使直升机安全着陆(见图 4g))。可以看出, 最后侧向速度与下降率均接近0 m/s(见图 4b)和图 4c)), 且偏航角速度也接近0 m/s(见图 4h)), 因此着陆更为安全。这是因为自转着陆时, 发动机不再向旋翼输出扭矩, 因此在小尾桨距卡滞的情况下, 直升机仍可以在着陆时保持偏航姿态的稳定(见图 4i))。自转着陆需要的时间和飞行距离比常规着陆要更长一些。
3) 本节得到的最优着陆轨迹和操纵过程, 与飞行试验(文献[3-4])中对直升机小尾桨距卡滞后安全着陆提出的建议相符, 即:当尾桨卡在小桨距时, 采用小功率(经济速度附近)就能保持方向的平衡, 但不利于着陆机动。着陆过程中需采用较大的侧滑和较大的下降率接近着陆场, 在接地前应适当提高水平速度, 优先保证接地瞬间垂向速度和接地姿态处于限制之内; 或者, 当高度降至约2~3 m时, 将油门关至慢车进行自转着陆。说明本节的数值仿真结果较为合理。
5 结论1) 本文通过最优控制方法研究了直升机遭遇大尾桨距卡滞以及小尾桨距卡滞后的最优着陆轨迹和操纵过程。
2) 大尾桨距卡滞一般对应于悬停、低速飞行、爬升等大功率飞行。由于此时尾桨拉力较大, 因此有利于使用较大的功率状态以较小的速度和下降率着陆。在着陆过程中, 大尾桨侧向力会使样例直升机向右偏航, 驾驶员可以通过侧滑来抵消一部分多余的偏航力矩。着陆时, 驾驶员增大总距, 需用功率上升, 并以垂直方式着陆, 大尾桨距有利于平衡负扭, 使直升机安全着陆。
3) 小尾桨距卡滞一般对应于下滑、经济速度附近的平飞等小功率飞行。驾驶员在着陆过程中可以通过降总距来降低需用功率, 从而减小负扭, 平衡航向, 期间会伴随较大的下降率。常规着陆时, 驾驶员增大总距, 此时需用功率上升, 小尾桨距无法平衡负扭, 因此触地时偏航角速度会很大(接近-30 m/s), 容易造成危险。若采用自转着陆(在离地3 m时迅速将油门关闭), 则发动机不再向旋翼输出扭矩, 因此触地偏航角速度接近0 m/s, 着陆更为安全。
4) 本文得到的最优控制仿真结果(即着陆轨迹和操纵过程)与文献[3-4]中飞行试验的结论相符, 说明本文的数值仿真结果较为合理。本文建立的直升机尾桨距卡滞后安全着陆的轨迹优化方法, 可以为尾桨距卡滞飞行试验提供一定的参考。
| [1] | O'ROURKE M J. Simulation Model for Tail Rotor Failure[J]. Journal of Aircraft, 1994, 31(1): 197-205. DOI:10.2514/3.46474 |
| [2] | LIU L, PINES D J. Analysis of US Civil Rotorcraft Accidents Caused by Vehicle Failure or Malfunction[C]//American Helicopter Society 61st Annual Forum Proceedings, Grapevine, 2005 |
| [3] |
孙杰, 高艳辉. 直升机尾桨故障及其试飞研究[J]. 飞行力学, 2001, 19(4): 67-69.
SUN Jie, GAO Yanhui. The Helicopter Tail-Rotor Failure and the Flight Test[J]. Flight Mechanics, 2001, 19(4): 67-69. (in Chinese) DOI:10.3969/j.issn.1002-0853.2001.04.016 |
| [4] |
于琦, 章海红. 直升机尾桨机械性失效及试飞研究[J]. 飞行力学, 2008, 26(3): 74-77.
YU Qi, ZHANG Haihong. Analysis of the Tail-Rotor Failure from Mechanical Malfunction and Research in Flight Test[J]. Flight Mechanics, 2008, 26(3): 74-77. (in Chinese) |
| [5] | FRANK L, THONGSAY V. US Army Airworthiness Approval for UH-60 Fly-by-Wire Aircraft Flight Testing[C]//American Helicopter Society 66th Annual Forum, Arizona, 2010 |
| [6] | STACEY K, DAVID A. The Yaw Return Maneuver-the Regulatory History, Future, and Impact on the Structural Design Loads[C]//American Helicopter Society 65th Annual Forum, Grapevine, Texas, 2009 |
| [7] | SINGH H K, PAWAR P M, GANGULI R, et al. On the Effect of Mass and Stiffness Unbalance on Helicopter Tail Rotor System Behavior[J]. Aircraft Engineering and Aerospace Technology, 2008, 80(2): 129-138. DOI:10.1108/00022660810859355 |
| [8] | LI C G, SHU P, Ma X M, et al. Failure Analysis on Tailor Rotor Rod Components of a Helicopter[J]. Failure Analysis and Prevention, 2013, 8(6): 346-349. |
| [9] | GOODMAN N, BAYOUMI A, BLECHERTAS V, et al. CBM Component Testing at the University of South Carolina: Ah-64 Tail Rotor Gearbox Studies[C]//AHS Technical Specialists' Meeting on Condition Based Maintenance Conference Proceedings, Virginia, 2009 |
| [10] | CHEREPINSKY I, DRISCOLL J T, KINKEAD W D, et al. Control Surface Failure Detection for Fly-by-Wire Aircraft[D]. U.S.Patent Application 8/032, 269[P]. 2011-10-4 |
| [11] | WALTNER P J, KNAUST G. Tail Rotor Failure Recovery Controller[P]. U.S. Patent Application 10/124, 889, 2018-11-13 |
| [12] | SOMERS T M, BONINO R K, CLEVE B R, et al. HUMS/MMIS as an Aviation Combat Multiplier[C]//American Helicopter Society 63rd Annual Forum Proceedings, Virginia, 2007 |
| [13] | RAJENDRAN S, GU D. Fault Tolerant Control of a Small Helicopter with Tail Rotor Failures in Hovering Mode[C]//11th IEEE International Conference on Control & Automation, 2014 https://www.researchgate.net/publication/271466374_Fault_tolerant_control_of_a_small_helicopter_with_Tail_Rotor_Failures_in_hovering_mode |
| [14] | ANDREA R, RICCARDO B M, PIETRO S, et al. AW169 Loss of Tail Rotor Effectiveness Simulation[C]//43rd European Rotorcraft Forum, Forum, Milano, Italy, 2017 |
| [15] | BOTTASSO C L, MAISANO G, SCORCELLETTI F. Trajectory Optimization Procedures for Rotorcraft Vehicles, Their Software Implementation, and Applicability to Models of Increasing Complexity[J]. Journal of the American Helicopter Society, 2010, 55(3): 1-12. |
| [16] |
孟万里, 陈仁良. 直升机单发失效后自转着陆轨迹优化[J]. 航空学报, 2011, 32(9): 1599-1607.
MENG Wanli, CHEN Renliang. Trajectory Optimization of Helicopter Autorotation Landing after One Engine Failure[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(9): 1599-1607. (in Chinese) |
| [17] | MENG W, CHEN R. Study of Helicopter Autorotation Landing Following Engine Failure Based on a Six-Degree-of-Freedom Rigid-Body Dynamic Model[J]. Chinese Journal of Aeronautics, 2013, 26(6): 1380-1388. DOI:10.1016/j.cja.2013.07.041 |
| [18] |
孟万里.直升机单台发动机失效后飞行轨迹优化研究和应用[D].南京: 南京航空航天大学, 2014: 13-33 MENG Wanli. Study and Application of Trajectory Optimization for Helicopter Flight after One Engine Failure[D]. Nanjing, Nanjing University of Aeronautics and Astronautics, 2014: 13-33(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10287-1015951833.htm |
| [19] |
高正, 陈仁良. 直升机飞行动力学[M]. 北京: 科学出版社, 2003: 168-184.
GAO Zheng, CHEN Renliang. Helicopter Dynamics[M]. Beijing: Science Press, 2003: 168-184. (in Chinese) |
| [20] |
严旭飞, 陈仁良. 直升机尾桨完全失效后自转着陆轨迹优化[J]. 北京航空航天大学学报, 2018, 44(6): 1203-1212.
YAN Xufei, CHEN Renliang. Helicopter Autorotation Landing Optimization after Tail-Rotor Total Failure[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6): 1203-1212. (in Chinese) |
| [21] |
辛宏, 高正. 直升机涡环区域边界包线的确定[J]. 气动实验与测量控制, 1996, 10(1): 14-19.
XIN Hong, GAO Zheng. A Prediction of the Helicopter Vortex-Ring State Boundary[J]. Aerodynamic Experiment and Measurement & Control, 1996, 10(1): 14-19. (in Chinese) |
| [22] | BETTS J T. Survey of Numerical Methods for Trajectory Optimization[J]. Journal of Guidance Control & Dynamics, 1998, 21(2): 193-207. |
| [23] | KIM S. Certification of Transport Category Rotorcraft[S]. 29-2C, Washington: Federal Aviation Administration, Department of Transportation, 2014: 57-146 |
| [24] | GILL P E. User's Guide for SNOPT Version 7: Software for Large-Scale Nonlinear Programming[D]. San Diego, University of California, 2007 |
2. China Helicopter Design and Research Institute, Tianjin 300000, China
