

太阳帆航天器通过阳光照射在大面积薄膜上的反射光压获得飞行动力,可实现小推力、长时间的加速飞行,具有不消耗燃料的优点[1]。当前微纳卫星技术发展迅速,在多个领域已经进入实用化阶段,后续发展趋势呈现出标准化、模块化、组网协同等特点,具有很高的应用价值[2]。
在微纳卫星平台上使用太阳帆是个具有挑战性的项目,受尺寸限制,微纳卫星无法携带较大太阳帆,实际面质比很小,因此能完成的任务有限。但微纳卫星的研制成本低、周期短,因此将太阳帆应用在微纳卫星上仍具有很大的意义。美国航天局(NASA)发射的NanoSail-D是一颗3U太阳帆立方星,于2011年1月在近地轨道成功展开太阳帆,运行了120天后离轨,坠入大气层烧毁[3-4]。美国行星协会(TPS)的LightSail项目也是使用3U立方星在低地球轨道进行轨道机动,其第一颗卫星LightSail1于2015年6月在轨展开,数日后离轨,第二颗卫星仍在研制中[5]。
太阳帆作为新型推进方式,其控制方法也在逐步发展。LightSail项目计划使用一种开/关控制的方法进行升轨[6],太阳帆在接近太阳时保持与阳光方向平行,远离太阳时垂直于阳光,提供加速推力。此方法很简单,容易实现,但只能提高远地点高度,对其他轨道根数无法控制。使用最优控制的方法结合太阳帆最优指向可以将多个轨道根数控制到目标值,但有其他限制:直接法[7]需要大量节点来保证精度,导致运算时间长,能求解的区间小;间接法[8]对初值猜测非常敏感,不合适的初值会导致结果无法收敛。使用加权组合控制[9]方法可以同时控制多个轨道根数,其优点在于无须猜测初值,也不用大量节点保证精度。
目前对太阳帆的研究以深空探测为主,日本于2010年发射的IKAROS[10]太阳帆成功完成了从地球轨道到金星轨道的转移任务。其他理论研究大多是基于大面积太阳帆(上万平方米)的任务,而大面积太阳帆的控制以目前的技术很难实现。
在近地轨道上使用小面积太阳帆的研究很少,以太阳帆在轨展开和姿态控制的验证为主。LightSail项目的升轨方案是用于近地轨道的,但只能提高远地点高度,对其他轨道根数无法控制。本文结合微纳卫星太阳帆的轨道机动能力,制定了一个太阳同步轨道转移任务,使用加权组合的方法控制轨道根数,并提出了一种分段控制的策略来控制降交点地方时,使太阳帆在升轨的同时满足太阳同步轨道的相应要求。文章对任务进行了仿真分析,其结果对后续实际项目的应用具有参考价值。
1 轨道动力学模型本文轨道建模使用的坐标系有2个:J2000地心赤道惯性坐标系OXYZ, 以地心O为原点, X轴指向J2000春分点方向, Z轴垂直于赤道面指向地球北极方向, Y轴在赤道面内垂直于X轴, XYZ三轴构成右手直角坐标系; 航天器轨道坐标系ORTN, 原点为地心O, R轴指向航天器位置, 即轨道径向, T轴为横向, 在轨道面内垂直于R轴指向航天器运动方向, N轴为轨道法向, 垂直于轨道面, RTN三轴构成右手直角坐标系。
为了避免出现奇点, 本文使用Walker等[11]提出的改进春分点轨道根数的摄动方程, 对经典轨道根数六要素(长半轴a, 偏心率e, 轨道倾角i, 升交点赤经Ω, 近地点角距ω, 真近点角θ)进行变量替换, 可消除奇点。设改进春分点轨道根数x=[p, f, g, h, k, L]T, 如下所示
|
(1) |
式中,p为半通径, L称为真经度角, 其他4个轨道根数并无实际物理意义。本文的摄动加速度fp主要考虑地球非球形摄动fj和太阳光压fS两部分

|
(2) |
文献[12]给出了fj的计算公式, fS将在第2节介绍。用fr, ft, fn表示摄动加速度fp在轨道坐标系中的分量, 使用改进春分点轨道根数的摄动方程如下

|
(3) |
式中,μ为地心引力常数, 辅助变量s和w定义如下

|
(4) |
用改进春分点轨道根数表示的由ORTN到OXYZ坐标系的旋转矩阵MR为
|
(5) |
本文讨论的太阳帆为理想模型, 不考虑帆面褶皱、热变形和结构振动。设帆面的反射率为1, 则光压力FS方向与帆面法向n重合, 如图 1所示, 可通过调节太阳帆姿态来控制光压方向[13]。

|
| 图 1 太阳光压示意 |
图 2为日心轨道坐标系, er代表太阳光方向矢量, et为轨道横向, 在轨道面内指向太阳帆运动方向, en为轨道法向。太阳与地球的相对位置和速度可由DE430星历[14]计算出, 可由此在日心轨道坐标系和地心坐标系之间转换, 从而确定er。帆面法向n和太阳光方向er的夹角α称为锥角, 定义域为[0, π/2];n在当地水平面上的投影与轨道面之间的夹角δ称为时钟角, 定义域为[0, 2π]。

|
| 图 2 太阳帆姿态角 |
作用在太阳帆面上的光压加速度fS可表示为
|
(6) |
式中,P为光压压强, 在距离太阳约1AU的位置有P≈ 4.563×10-6 N/m2, kS为受晒因子, 在阴影中取0, 在阴影外取1。在近地轨道上, 地影可以近似看作半径等于地球半径RE的圆柱体。
设太阳位置矢量Rsun与卫星的位置矢量r之间的夹角为ψ(如图 3所示), 则

|
| 图 3 地影圆柱与航天器轨道间的关系 |
|
(7) |
r为卫星地心距。卫星在地影内所满足的条件为
|
(8) |
太阳帆推力的大小和方向均受到太阳光方向的限制, 为了尽快提升轨道能量使太阳帆从地球逃逸, 可以用局部最优控制, 使所受太阳光压沿某个方向分量最大。Coverstone等[15]最早用最优控制理论对局部最优控制律进行了公式推导, 并得出结果。
任取一个方向矢量u, 可定义该方向与太阳光方向的夹角定义为αu, 取值范围[0, π]。太阳光压力方向与太阳光方向夹角不能超过90°, 要使太阳光压沿u的方向分量最大, 太阳帆姿态应满足:
1) n, u, er三者共面;
2) 锥角α满足如下关系
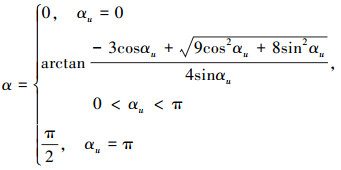
|
(9) |
整理几何关系可求得太阳帆最优指向为
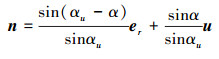
|
(10) |
本文的任务设定为从一个较低的太阳同步近圆轨道转移至一个较高的太阳同步近圆轨道。
由地球非球形摄动J2项引起的轨道升交点赤经变化率[16]为

|
(11) |
式中,RE为地球平均半径。太阳同步轨道的特点是


从(11)式可以看出, 使
轨道降交点对应的地方时Hd是太阳同步轨道的一个指标, 计算公式如下

|
(12) |
式中,αS为太阳平赤经, 其变化率等于
使某个轨道根数变化最快的推力方向称为局部最优控制律, 可以由高斯摄动方程[17]得出。加权组合控制律核心思想是分别推导出使每个轨道根数变化的局部最优控制律, 然后加权求出一个方向作为最优推力方向。
5.1.1 各轨道根数的局部最优控制律1) 长半轴
根据高斯摄动方程, 长半轴a的变化率为
|
(13) |
式中, n为平均运动角速度, 计算公式为

|
(14) |
在某个时刻, 式中的轨道根数都是确定的, 变量只有推力的方向, 要使当前时刻长半轴变化率最大, 即(13)式中2个向量的数乘结果最大, 应使2个向量的夹角最小。设推力方向为ua, 则使a变化最快的推力方向应为
|
(15) |
此ua即为改变长半轴的局部最优控制律。
2) 偏心率
偏心率的变化率为
|
(16) |
式中的E为偏近点角, 其余弦的计算公式为
|
(17) |
同理可得偏心率的局部最优控制律ue为
|
(18) |
3) 轨道倾角
轨道倾角变化率为
|
(19) |
轨道倾角的局部最优控制律ui为
|
(20) |
根据前面推导的局部最优控制律, 加权组合控制律u*可表示为

|
(21) |
式中, Wa, We, Wi是常值, 表示各轨道根数的权重, 可根据需要进行手动调整, 也可以用寻优算法计算; 下标f表示期望终值。u*表示的即为当前时刻最优推力方向, 结合太阳帆最优指向, 令u=u*即可。加权组合控制律基于反馈的作用, 求出每一时刻的最优推力方向, 具有计算速度快、精度高的优点。
设目标值允许误差分别为ea, ee, ei, 数值与具体任务有关。用下标tar表示目标值, 当初始状态和常值权重均确定时, 令af=atar, ef=etar, if=itar, 代入(21)式确定当前时刻的u*, 将u=u*代入到(10)式中求出n, 再通过(6)式求出fS, 结合(2)式求出摄动加速度fp, 将fp在轨道坐标系中分解后代入摄动方程(3)进行积分, 经过迭代当a, e, i均到达目标值允许误差范围内时的t即为tf, 因此tf是一个确定值。
5.2 分段控制策略使用加权组合控制律可以有效地将轨道根数控制到目标值, 而控制目标不只是轨道根数, 还有降交点地方时, 即Hd(tf)=Hd(t0), 使用单纯的加权组合控制律无法满足要求, 所以在此基础上提出一种分段控制策略来控制Hd(tf)。
太阳帆推力大小和方向与姿态角有关, a和i很难保证同步变化。在本文的提高轨道高度任务中, 相对于初始轨道, 目标轨道的a和i均增大了, 可使变化较快的轨道根数先维持一段时间Δt, 之后再和另一轨道根数一起控制至目标值(e的数量级较小, 可以不做分段控制)。通过调整Δt的值即可相应改变Ω的平均变化率, 将其调整至
比较a和i变化快慢依据为降交点地方时Hd。Hd直接反映太阳光与轨道面夹角, 存在某个临界Hd, 使得无须分段即可满足
Hd临界值的计算思路如下:上一节已说明当初始时间、轨道根数和常值权重确定时, 只使用加权组合控制律, tf是确定的。现将Hd(t0)设为变量, 使用数值计算方法, 把时间分为[0:00, 6:00], [6:00, 12:00], [12:00, 18:00], [18:00, 24:00]4个区间, 每个区间内令Hd (t0)取某个值, 令af=atar, ef=etar, if=itar, 代入(21)式求出u*, 将u=u*代入到(10)式中求出n, 结合(6)式和(2)式求出摄动加速度fp, 将其在轨道坐标系中分解后代入摄动方程(3)进行积分, 经过迭代当a, e, i均到达目标值允许误差范围内时确定tf, 此时的Hd(tf)与初值比较, 若不相等则用二分法在区间中取另一个Hd(t0)进行计算, 通过迭代直至满足Hd(tf)=Hd(t0), 即可求出4个临界值, 对应的控制时间分别为tf1, tf2, tf3, tf4。
设0:00≤Hd1 < Hd2 < Hd3 < Hd4≤24:00, 分段控制策略如下:
1) Hd(t0)=Hd1, Hd2, Hd3, Hd4时

|
(22) |
2) Hd(t0)在[0:00, Hd1)或(Hd2, Hd3)或(Hd4, 24:00]区间内时
|
(23) |
3) Hd(t0)在(Hd1, Hd2)或(Hd3, Hd4)区间内时

|
(24) |
选定初始轨道后, 根据Hd(t0)选择分段控制策略。此时轨道机动时间tf只与u*有关, 而u*中的af, ef, if取决于分段控制的Δt。换言之, 此时tf是Δt的函数, 由Δt唯一确定。
升交点赤经平均变化率表示为
|
(25) |
通过与前面类似的数值计算方法求出Δt:首先选择二分法区间, 设n=1, 2, 3, 4, 则区间选为[0, tfn], tfn为距离Hd(t0)最近的临界值所对应的控制时间(如距离Hd(t0)最近的临界值为Hd1, 则n取1), Δt在[0, tfn]内取某个值, 使用(22)至(24)式中相应的控制策略, 代入(21)式中求出加权组合控制律u*, 将u=u*代入到(10)式中求出n, 结合(6)式和(2)式求出摄动加速度fp, 将其在轨道坐标系中分解后代入摄动方程(3)进行积分, 经过迭代当a, e, i均到达目标值允许误差范围内时确定tf, 将Ω(tf)代入(25)式中求出

分段控制的好处在于a和i的变化并不耦合, 对于变化较快的根数, 保持一段时间再变化, 对总机动时间并不会有很大影响。
6 仿真分析 6.1 具体任务仿真以目前的技术水平, 还不能将太阳帆做得很大, 实际发射成功的太阳帆航天器中最大的是日本的IKAROS, 面积为196 m2。太阳帆的推力取决于面积, 小太阳帆能完成的任务有限。
本文目的是研究太阳帆推进微纳卫星的轨道机动能力, 结合目前技术水平, 采用太阳帆面积以IKAROS为参考, 平台选为立方星, 光压加速度的量级约为10-5 m/s2, 因此设定任务目标为从一个较低的太阳同步近圆轨道转移至一个较高的太阳同步近圆轨道, 高度相差100 km, 预计总机动时间在100天左右。
卫星平台质量约为20 kg。太阳帆材料为2 μm厚的聚酰亚胺薄膜[18], 体积密度为1.42 g/cm3, 正面镀0.1 μm铝, 体积密度为2.70 g/cm3, 反面镀0.012 5 μm铬, 体积密度为7.19 g/cm3, 可得出太阳帆面密度约为3.2 g/m2。太阳帆为边长14.14 m的正方形, 完全展开面积为200 m2, 可计算出太阳帆的质量约为0.64 kg, 体积约422.5 cm3。
太阳帆支撑架为4根10 m长的碳纤维复合管, 使用时充气钢化[19]。管壁厚度约0.01 mm, 充气后直径40 cm, 线密度约70 g/m。由此可计算出支架的质量约2.8 kg, 体积约500 cm3。
由此可得太阳帆面和支撑架总质量约3.44 kg, 考虑到太阳帆控制模块、支撑架填充气体质量以及实际制造时的误差, 保守考虑将太阳帆相关部件质量设为5 kg, 加上卫星平台后总质量设为25 kg, 太阳帆面积为200 m2。
初始时间设为2019年1月1日0:00:00, 初始轨道为1 000 km的太阳同步圆轨道, 目标轨道为1 100 km的太阳同步近圆轨道, 降交点地方时不变, 通过控制太阳帆姿态使轨道的a, e, i满足要求。具体轨道根数要求如表 1所示。
| 参数 | 初始轨道 | 目标轨道 |
| 长半轴a/km | 7 378.14 | 7 478.14 |
| 偏心率e | 0 | 0 |
| 轨道倾角i/(°) | 99.484 3 | 99.946 2 |
| 升交点赤经Ω/(°) | 10.61 | / |
| 近地点角距ω | 0 | / |
| 真近点角θ | 0 | / |
| 降交点地方时 | 6:00 | 6:00 |
误差分别定为ea=10 km, ee=5×10-3, ei=0.01°。使用加权组合控制[9], 权重取Wa=1, We=50, Wi=20, 可计算出Hd1=0:40, Hd2=11:04, Hd3=14:49, Hd4=21:08, 任务中的Hd(t0)为6:00在Hd1和Hd2之间, 所以分段控制i, 使用(24)式的分段策略, 计算出Δt为21天, tf为70天。图 4反映了轨道机动过程中轨道根数的变化情况。

|
| 图 4 轨道根数变化 |
经过70天时间, 轨道根数变化至目标值的误差范围内。最终时刻的a=7 480 km, e=0.001 5, i=99.945°, 周期变化的范围分别为10 km,0.0015,0.005°, 均处于误差范围内。

|
| 图 5 无分段控制的升交点赤经变化率 |
图 6和图 7分别为无分段控制和有分段控制升交点赤经变化率

|
| 图 6 分段控制后升交点赤经变化率 |

|
| 图 7 一个周期内锥角的变化 |
太阳帆控制角在其中一个周期内的变化如下:

|
| 图 8 一个周期内时钟角的变化 |
其中, 太阳帆的锥角根据最优指向公式(3)计算得出, 太阳帆的时钟角始终跟随加权控制律u*。
6.2 降交点地方时的影响降交点地方时直接反映了轨道面与太阳光方向的夹角, 这对太阳帆的推进效率有很大影响:由于轨道高度较低, 当降交点地方时在12:00或0:00附近时, 轨道面与太阳光方向夹角较小, 地影区域很大, 在背光面无法提供推力; 当降交点地方时在6:00或18:00附近时, 轨道面近似垂直于太阳光方向, 阴影区域很小甚至没有, 可以提供比较全面的推力, 如图 9所示。

|
| 图 9 降交点地方时的影响 |
本文研究的是太阳同步轨道, 而推力又是小推力, 所以在运行过程中轨道面和太阳光方向的夹角不会变化太大, 从上个仿真也可看出, 升交点赤经变化率的变化幅度很小, 所以初始降交点地方时不同, 轨道机动的效果也会不同。
表 2列举了不同降交点地方时轨道机动所需时间。可以看出, 在6:00和18:00附近的太阳同步轨道上, 太阳帆的效率较高, 在0:00和12:00附近的太阳同步轨道上, 太阳帆的效率较低, 最大相差2倍左右。因此, 在设计任务时需要考虑初始降交点地方时的影响。
| 初始降交点地方时 | 初始升交点赤经/° | 所需时间/d |
| 0:00 | 280.6 | 157 |
| 3:00 | 325.6 | 128 |
| 6:00 | 10.6 | 70 |
| 9:00 | 55.6 | 120 |
| 12:00 | 100.6 | 150 |
| 15:00 | 145.6 | 125 |
| 18:00 | 190.6 | 81 |
| 21:00 | 235.6 | 100 |
本文设计了一个微纳卫星太阳帆的太阳同步轨道转移任务, 结合加权组合控制律和太阳帆最优指向来控制轨道根数, 并提出了分段控制轨道根数的策略来调整目标轨道的降交点地方时, 最后进行了仿真分析, 对比了不同降交点地方时下的轨道机动效率, 得出了以下结论:
1) 在研究近圆轨道时, 会出现e=0的点, 应引入改进春分点轨道根数来避免奇点。
2) 在低地球轨道, 航天器受地球非球形摄动影响较大, 使用太阳帆不能任意控制有长期变化项的轨道根数(Ω和ω), 但没有长期变化项的a、e、i是可以控制的。
3) 太阳帆可以对升交点赤经变化率进行微调, 使用分段控制的策略可以保证目标轨道的降交点地方时和初值相同。
4) 不同的降交点地方时对太阳帆效率有很大影响, 在6:00和18:00附近效率较高, 而0:00和12:00附近效率较低, 在设计任务时应当考虑。
| [1] |
胡海岩. 太阳帆航天器的关键技术[J]. 深空探测学报, 2016, 3(4): 334-344.
HU Haiyan. Key Technologies of Solar Sail Spacecraft[J]. Journal of Deep Space4 Exploration, 2016, 3(4): 334-344. (in Chinese) |
| [2] |
马定坤, 匡银, 杨新权. 微纳卫星发展现状与趋势[J]. 空间电子技术, 2017, 14(3): 42-45.
MA Dingkun, KUANG Yin, YANG Xinquan. Development Actual State and Trends of Nano-Satellite[J]. Space Electronic Technology, 2017, 14(3): 42-45. (in Chinese) DOI:10.3969/j.issn.1674-7135.2017.03.009 |
| [3] | WHORTON M, HEATON A, PINSON R, et al. NanoSail-D: the First Flight Demonstration of Solar Sails for Nanosatellites[J/OL](2008-08-11)[2019-11-28]. https://ntrs.nasa.gov/search.jsp?R=20090001899 |
| [4] | ALHORN D C, CASAS J P, AGASID E F, et al. Nanosail-D: The Small Satellite That Could[2019-11-28]. https://digitalcommons.usu.edu/smallsat/2011/all2011/37/ |
| [5] | RIDENOURE R W, SPENCER D A, STETSON D A, et al. Status of the Dual CubeSat LightSail Program[C]//AIAA SPACE 2015 Conference and Exposition, California, 2015: 4424 |
| [6] | RIDENOURE R, MUNAKATA R, DIAZ A, et al. LightSail Program Status: One Down, One to Go[J/OL](2015-07-31)[2019-11-28]. https://digitalcommons.usu.edu/smallsat/2015/all2015/32/ |
| [7] |
梁轲, 朱战霞. 基于直接配点法的远程交会轨道优化设计与仿真[J]. 系统仿真学报, 2012, 22(3): 682-690.
LIANG Ke, ZHU Zhanxia. Optimal Design and SDimulation of Long-Range Orbital Rendezvous Based on Direct Collocation Method[J]. Journal of System Simulation, 2012, 22(3): 682-690. (in Chinese) |
| [8] |
沈红新, 李恒年. 静止卫星小推力多圈转移轨道间接优化[J]. 宇航学报, 2017, 38(10): 1041-1047.
SHEN Hongxin, Li Hengnian. Indirect Optimization of Low-Thrust Multi-Revoloution Orbit Transfers for Geostationary-Orbit Satellites[J]. Journal of Astronautics, 2017, 38(10): 1041-1047. (in Chinese) |
| [9] |
尚海滨, 崔平远, 栾恩杰. 近地小推力转移轨道的加权组合指导策略[J]. 航空学报, 2007, 28(6): 1419-1427.
SHANG Haibin, CUI Pingyuan, LUAN Enjie. Guidance Scheme for Near-Earth Low-Thrust Orbit Transfers Using Blended Locally Optimal Laws[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(6): 1419-1427. (in Chinese) DOI:10.3321/j.issn:1000-6893.2007.06.025 |
| [10] | Yuichi Tsuda, Osamu Mori, Ryu Funase, et al. Achievement of IKAROS-Japanese Deep Space Solar Sail Demonstration Mission[J]. Acta Astronautica, 2013, 82: 183-188. DOI:10.1016/j.actaastro.2012.03.032 |
| [11] | WALKER M J H. A Set of Modified Equinoctial Orbit Elements[J]. Celestial Mechanics, 1986, 38(4): 391-392. DOI:10.1007/BF01238929 |
| [12] |
章仁为. 卫星轨道姿态动力学与控制[M]. 北京: 北京航空航天大学出版社, 1998.
ZHANG Renwei. Satellite Orbit Attitude Dynamics and Control[M]. Beijing: Beihang University Press, 1998. (in Chinese) |
| [13] |
龚胜平, 李俊峰. 太阳帆航天器动力学与控制[M]. 北京: 清华大学出版社, 2015.
GONG Shengping, LI Junfeng. Dynamics and Control of Solar Sail Spacecraft[M]. Beijing: Tsinghua University Press, 2015. (in Chinese) |
| [14] | FOLKNER W M, WILLIAMS J G, BOGGS D H, et al. The Planetary and Lunar Ephemerides DE430 and DE431[J]. Interplanetary Network Progress Report, 2014, 196: 1-81. |
| [15] | COVERSTONE V L, PRUSSING J E. Technique for Escape from Geosynchronous Transfer Orbit Using a Solar Sail[J]. Journal of Guidance Control & Dynamics, 2003, 26(4): 628-634. |
| [16] |
黄福铭, 杨小芹, 谭炜. 太阳同步轨道设计与控制[M]. 北京: 国防工业出版社, 2015.
HUANG Fuming, YANG Xiaoqin, TAN Wei. Design and Control of Solar Synchronous Orbit[M]. Beijing: National Defence Industrial Press, 2015. (in Chinese) |
| [17] |
郗晓宁, 王威. 近地航天器轨道基础[M]. 长沙: 国防科技大学出版社, 2003.
XI Xiaoning, WANG Wei. Fundamentals of Near-Earth Spacecraft Orbit[M]. Changsha: National University of Defence Technology Press, 2003. (in Chinese) |
| [18] |
陈罗婧, 王沫, 吕秋杰, 等. 国外太阳帆薄膜材料选择及帆面展开方式研究进展[J]. 空间电子技术, 2015(3): 18-26.
CHEN Luojing, WANG Mo, LYU Qiujie, et al. Recent Progress on Solar Sail Membrane Materials and Deployment Technology[J]. Space Electronic Technology, 2015(3): 18-26. (in Chinese) DOI:10.3969/j.issn.1674-7135.2015.03.004 |
| [19] |
刘彪, 冀棉, 杨士勇. 太阳帆材料研究进展[J]. 宇航材料工艺, 2013, 43(4): 24-28.
LIU Biao, JI Mian, YANG Shiyong. Recent Progress on Solar Sail Materials[J]. Aerospace Materials & Technology, 2013, 43(4): 24-28. (in Chinese) DOI:10.3969/j.issn.1007-2330.2013.04.006 |
