

2. 中国电子科技集团公司 第二十八研究所, 江苏 南京 210007
在众多水下无线传感器网络的定位算法中, 根据在定位过程中有无利用距离信息可将定位算法分为基于测距的定位算法和无需测距的定位算法。其中基于测距的定位算法根据节点与目标之间的距离实现对目标的定位, 其定位精度较高。基于测距的定位算法包括了基于TOA(time of arrival)、基于TDOA(time different of arrival)、基于DOA(direction of arrival)以及基于RSS(received signal strength)等的定位算法[1-5]。通常定位算法性能分析从定位误差几何精度因子GDOP(geometric dilution of precision)分析以及克拉美罗下界两个方面展开。研究发现定位误差的大小受到传感器节点位置及位置扰动、节点量测值测量误差大小、信号在介质中的传播速度等影响。为了获得较好的定位性能, 研究者对最优传感器节点几何结构布放策略展开了研究[6-7], 通过分析Fisher信息矩阵以及克拉美罗界研究最优的传感器网络几何结构。可见, 对水下传感器网络定位方法克拉美罗界的研究在定位性能分析以及网络结构部署方面均有重要的意义。
在分析定位误差的克拉美罗界过程中, 经常假设各个节点时间同步, 且各节点获得的观测量的误差相互独立且服从均值为零的高斯分布, 并且各个节点观测量误差的方差均相同。张健在其硕士论文中以各个节点获得的信号到达时间服从均值为真实值方差为σ2的正态分布为前提条件推导了基于TOA的定位误差克拉美罗界[6]。文献[7]研究基于距离量测的水下目标定位方法以定位精度最优为目标的传感器最优布放策略, 通过最大化Fisher信息矩阵的行列式的值获得最高定位精度, 其中计算Fisher信息矩阵过程中,假设各个节点的距离量测估计误差均服从均值为0, 方差为σ2的高斯分布。文献[8]研究无线传感器网络进行目标定位的统计性能, 将定位误差的克拉美罗界视为随机变量, 研究其概率分布情况, 给出了定位误差CRLB的闭式表达式, 其分析过程中假设各个锚节点获得的目标到达时间估计量服从独立同分布且各个节点的估计量方差均相同。关于各个节点对信号到达时间观测量(或观测误差)的方差相同的假设, 在某些合作场景下, 待定位目标与传感器网络节点之间具有通信能力的情况下是成立的, 如UUV的定位、传感器节点定位等。然而对于非合作场景, 如传感器网络对未知目标进行定位, 节点对目标距离的估计通过发射信号的回波时延进行计算获得, 因此时延估计的性能受到信噪比的影响, 不同节点获得的TOA估计量或者距离估计量的方差不同, 故以上假设不再适用, 需要重新分析推导定位误差及克拉美罗界。针对这一点, 本文以水下传感器网络对非合作目标的主动探测定位为应用背景, 研究各观测节点对目标的测距误差随距离变化时, 定位误差的克拉美罗界。
1 基于TOA的主动定位原理在目标定位研究领域, 主动定位TOA算法的定位示意图如图 1所示。

|
| 图 1 基于TOA的主动节点定位示意图 |
其中, 每个节点为主动节点, 具有发射和接收信号的能力, S为目标位置, ri(i=1, …, N)为目标到节点i的距离。TOA算法由节点发射信号, 经目标反射后由节点接收信号, 根据发射信号和接收信号之间的传播时间, 计算出信号的传播距离, 即目标到节点的距离, 利用这些距离信息可以进行定位。
假设N个节点的位置为(xi, yi), i=1, …, N, 目标位置为(x, y), 则观测节点获得的目标的距离为

|
(1) |
式中, ri为目标到第i个节点的距离。节点与目标之间的距离可以通过(2)式计算得到, 即
|
(2) |
式中,c为水中声速, τi为第i个节点接收信号与发射信号之间的时间延迟。
对(1)式中的方程组整理得到
|
(3) |
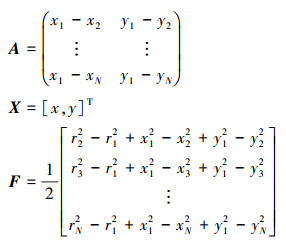
令
|
则(3)式可以写作以下矩阵形式

|
(4) |
(4) 式的最小二乘解即为目标位置的估计值
|
(5) |
则目标位置的真实值X和估计值
对目标定位算法进行性能分析的一个重要途径是进行定位误差分析, 可以从2个方面进行:①通过对定位方程求微分获得定位误差大小;②通过分析定位方法的克拉美罗界对定位性能进行分析。
2.1 节点距离测量误差分析对于第i个接收节点, 测量得到的目标距离值

|
(6) |
目标距离值r与时延τ之间为线性关系
|
(7) |
式中,B0为信号均方根带宽, E为接收信号能量, N0/2为噪声功率谱密度。由于最大似然估计是无偏估计或渐近无偏估计, 并且同时是有效估计或者渐近有效估计[10], 因此目标距离测量值可近似认为服从均值为r, 方差为σ2的正态分布, 其中σ2= 
对于主动寻的节点, 其回波的信噪比可以按照主动声呐方程进行计算

|
(8) |
或者

|
(9) |
式中, SL为发射声源级, NL为噪声级, TS为目标强度, DI为指向性因数, TL为节点至目标的单程传播损失, RL为混响级。
海水中声信号的传播损失可以用以下式子计算

|
(10) |
式中,r为节点与目标之间的距离, n取20(球面扩展)或10(柱面扩展), α为吸收系数。在深海环境下, 声信号传播符合球面扩展, 并且当主动发射信号频率在中低频范围内时, 吸收损失较小, 在此为了分析简便, 忽略吸收损失, 则传播损失可以近似为

|
(11) |
经过推导, 可以得到距离测量值方差近似为
|
(12) |
式中,
对(1)式的定位方程两边求微分, 不考虑节点位置误差时, 可得误差方程为

|
(13) |
令
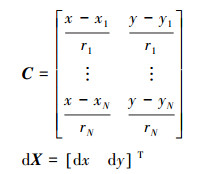
|
|
则可将上式写作矩阵形式

|
(14) |
则有

|
(15) |
式中,C†表示矩阵C的伪逆。
定位误差的协方差矩阵为

|
(16) |
令E(drdrT)=Γ, 则有
|
(17) |
式中,tr(·)表示矩阵的迹。
2.3 克拉美罗界已有文献进行定位性能分析时, 通常假设时间测量值服从均值为实际值的正态分布, 且各个节点获得的时间测量值的方差相同。而实际应用中, 该假设只适用于对合作目标的定位, 对于将传感器网络用于非合作目标的定位时不再适用, 非合作目标到不同节点的距离测量误差会因为距离的不同而变化。因此针对传感器网络用于目标定位的情况, 对其克拉美罗界需要进行修正。


|
(18) |
对测量得到的相互独立的距离估计量, 联合条件概率密度函数为
|
(19) |
对(19)式两边取对数, 得到

|
(20) |
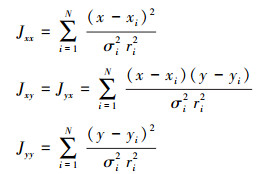
则费舍尔信息矩阵为
|
(21) |
式中
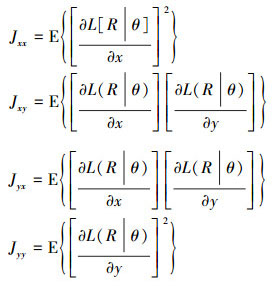
|
(22) |
由于距离测量值

|
(23) |
得到
|
(24) |
定位误差的克拉美罗界为
|
(25) |
由(25)式可以看出, 基于TOA的目标定位方法, 其定位均方误差下界与目标与各个节点的位置关系紧密相关。当σi2=σ2, i=1, …N时, 即各节点获得的距离估计方差相同, 此时公式(24)退化成与文献[6]中相同的结论, 因此本文中的结果是合作目标定位情况下克拉美罗界的推广。
分析修正CRLB的计算量, 假设一次除法的运算量与一次乘法相当, 即将除法运算等效为乘法运算, 则计算某一位置点的修正CRLB需要完成约4N次加法和约9N次乘法(其中N为节点数目)。而计算修正前CRLB需要完成的加法和乘法次数分别约4N和6N。可见, 相比于修正前, 修正CRLB的计算量略有增加。
3 数值仿真及结果分析对基于TOA的主动定位算法在监测区域内的定位误差分布进行仿真, 使用蒙特卡罗实验获得误差分布统计结果, 并计算定位误差的克拉美罗界。
仿真实验1 节点坐标为(-500 m, 500 m), (0, -500 m), (500 m, 500 m), 构成等腰三角形。考察矩形区域内的定位误差分布情况, 节点以及考察区域如图 2所示。距离测量方差根据(12)式计算得到(其中k取2.5×10-12m-2), 获得各个节点的距离测量方差如图 3所示(其中黑色圆点代表节点位置)。进行100次蒙特卡罗实验, 最小二乘TOA算法的估计均方误差分布如图 4所示。

|
| 图 2 节点部署以及观测区域 |

|
| 图 3 各节点距离测量方差 |

|
| 图 4 估计均方误差分布图 |
定位误差的修正前克拉美罗界如图 5所示(节点距离估计方差取σ2=1 m2), 修正后克拉美罗界如图 6所示。

|
| 图 5 修正前CRLB分布图 |

|
| 图 6 修正后CRLB分布图 |
比较图 4~6可以发现, 修正后的CRLB在传感器网络构成的三角形内部的分布情况与蒙特卡罗实验获得的定位均方误差分布情况更加相符, 并且修正后的CRLB总体上小于修正前的CRLB。
仿真实验2节点坐标为(-1 000 m, -1 000 m), (-1 000 m, 1 000 m), (1 000 m, -1 000 m)和(1 000 m, 1 000 m), 构成正方形。考察矩形区域(如图 7所示)内的定位误差分布情况。距离测量方差根据(12)式计算得到(其中k取2.5×10-12m-2)。获得1#节点的距离测量方差如图 8所示, 其余节点的距离测量方差分布规律与1#节点相似。最小二乘TOA算法的误差分布如图 9所示。定位误差的修正前CRLB分布情况如图 10所示(节点距离估计方差取σ2=30 m2), 修正后CRLB分布情况如图 11所示。

|
| 图 7 节点部署以及观测区域 |

|
| 图 8 节点距离测量方差 |

|
| 图 9 估计均方误差分布图 |

|
| 图 10 修正前CRLB分布图 |

|
| 图 11 修正后CRLB分布图 |
从图 9~11可以看出, 传感器网络覆盖正方形范围内部的定位误差较小, 传感器连线位置的定位误差大于正方形内部的定位误差; 修正后CRLB变化趋势与蒙特卡罗实验获得的估计均方误差变化趋势更加符合; 修正后CRLB整体上小于修正前的CRLB。
4 结论本文针对水下传感器网络用于非合作目标的定位问题, 根据声呐方程确定每个观测节点对目标距离估计的方差, 进而推导出基于TOA估计的非合作目标定位误差的克拉美罗下界。该克拉美罗界可以看作合作目标定位方差克拉美罗下界的一种推广形式。
本文的分析结果可用于基于传感器网络的水下非合作目标定位性能分析以及传感器网络结构布置的理论分析依据。
| [1] | CHANDRASEKHAR Vijay, KGSEAH Winston, CHOO Y S, et al. Localization in Underwater Sensor Networks-Survey and Challenges[C]//Proceedings of the 1st ACM International Workshop on Underwater Networks, 2006: 33-40 |
| [2] | EROLKANTARCI M, MOUFTAH H T, OKTUG S. A Survey of Architectures and Localization Techniques for Underwater Acoustic Sensor Networks[J]. IEEE Communications Surveys & Tutotials, 2011, 13(3): 487-502. |
| [3] | WANG Biao, LI Yu, HUANG Haining, et al. Target Localization in Underwater Acoustic Sensor Networks[C]//Proceedings of 2008 Congress on Image and Signal Processing, 2008: 68-72 https://www.researchgate.net/publication/4354073_Target_Localization_in_Underwater_Acoustic_Sensor_Networks |
| [4] | XU E, DING Z, DASGUPTA S. Source Localization in Wireless Sensor Networks from Signal Time-of-Arrival Measurements[J]. IEEE Trans on Signal Processing, 2011, 59(6): 2887-2897. DOI:10.1109/TSP.2011.2116012 |
| [5] | WANG Biao, YANG Guang, XIE Zhibing, et al. Underwater Target Localization Based on DOAs of Sensor Array Network[C]//Proceedings of 2nd International Conference on Signal Processing Systems, 2010: 238-240 https://www.researchgate.net/publication/251948453_Underwater_target_localization_based_on_DOAs_of_sensor_array_network |
| [6] |
张健.基于时间测量的无线传感器网络定位技术研究与实现[D].郑州: 解放军信息工程大学, 2009 ZHANG Jian. Research and Implementation of Wireless Sensor Networks Positioning Technology Based on Time Measurement[D]. Zhengzhou, The PLA Information Engineering University, 2009(in Chinese) http://cdmd.cnki.com.cn/article/cdmd-90008-1011057021.htm |
| [7] | MORENOSALINAS David, PASCOAL Antonio, ARANDA Joaquin. Optimal Sensor Placement for Acoustic Underwater Target Positioning with Range-Only Measurements[J]. IEEE Journal of Oceanic Engineering, 2016, 41(3): 620-643. DOI:10.1109/JOE.2015.2494918 |
| [8] | O'LONE C E, DHILLON H S, BUEHRER R M. A Statistical Characterization of Localization Performance in Wireless Networks[J]. IEEE Trans on Wireless Communications, 2018, 17(9): 5841-5856. DOI:10.1109/TWC.2018.2850310 |
| [9] |
梁红, 张效民. 信号检测与估值[M]. 西安: 西北工业大学出版社, 2011.
LIANG Hong, ZHANG Xiaomin. Signal Detection and Estimation[M]. Xi'an: Northwestern Polytechnical University Press, 2011. (in Chinese) |
| [10] |
KAY S M.统计信号处理基础——估计与检测理论[M].罗鹏飞, 张文明, 刘忠, 译.北京: 电子工业出版社, 2003 KAY S M. Fundamentals of Statistical Signal Processing(Vol. Ⅰ: Estimation Theory, Vol. Ⅱ: Detection Theory)[M]. LUO Pengfei, ZHANG Wenming, LIU Zhong, Translator. Beijing, Publishing House of Electronics Industry, 2003(in Chinese) |
2. The 28 th Research Institute of China Electronic Technology Corporation, Nanjing 210007, China
