

2. 西北工业大学 无人机特种技术重点实验室, 陕西 西安 710065
大量事故数据调查表明飞机的起飞和着陆性能对于飞机安全飞行至关重要[1], 其计算方法对于飞机的设计和营运具有重要意义。起降过程是飞机地面和空中状态的转换, 需要考虑气候、机场、飞机、驾驶员操纵、地面效应等因素。目前起降性能计算软件只能部分或简化考虑上述影响因素, 导致计算参数不足、精度不高。起飞过程可根据飞机发动机是否出现故障以及驾驶员的操纵习惯分为单发、两点式、三点式、中断4种方式, 着陆分为进近下滑、拉平、接地、减速4个阶段。
目前主机厂所使用的起降性能计算软件建立在以飞机为质点的运动学方程或纵横向分离的动力学方程基础上, 主要有以下问题:①无法提供足够的性能参数;②计算结果的精度还可以提升;③难以满足现有标准;④算法水平有待提高;⑤无法考虑驾驶员的操纵习惯。设计一种新的起降性能计算算法, 将机场条件、飞机参数变化、驾驶员操纵、军用/民用飞机性能标准和规范进行合理的考虑, 可以为设计单位提供性能计算手段、为飞行员提供高精度的飞行手册数据、为新机场的建造和保证净空条件提供依据。近年来, 国内外学者对飞机起降性能计算进行了深入研究。波音和空客公司掌握较多的真实起降性能计算原始数据及试飞数据, 可根据客户需求开发各自的飞机性能计算软件。宋花玉等以发动机推力曲线和已知推力为基础[2], 插值确定未知推力、迭代确定离地速度, 对起飞滑跑距离及其影响进行了归一化处理[3]; 张立等通过实际飞行研究了起落架、襟翼、地面效应对气动力的影响, 建立着陆阶段的数值仿真模型并用差分方法离散求解[4]。王辉等采用Simulink实时环境建立了飞机各部分计算模型, 仿真验证了滑跑、起飞、巡航、降落等实验, 但对具体模型进行了简化, 算法还无法满足工程应用[5]。林可心等通过飞机速度、加速度数据对起降滑跑过程进行建模和仿真, 分析了起降过程中的影响因素, 但模型仍停留在理论计算阶段[6]。
起降过程飞机受到的环境、跑道、驾驶员操纵等因素均会对性能产生较大影响。因此, 影响因素考虑的越多, 过程越详细, 结果精度越高。本文以正常式布局的双发喷气式运输机或该类民航客机作为研究对象, 对各系统进行建模, 包括运动方程、气动力、发动机、起落架、动态质量模型。结合驾驶员的操纵习惯对正常情况下的两点式和三点式起飞以及非正常情况下的单发和中断起飞进行仿真, 并且对着陆进近下滑、拉平、接地和减速4个阶段依次仿真得到不同起飞方式和着陆各个阶段的起降性能参数。较传统分段数值积分方法和三自由度运动方程分析方法计算复杂度提高, 可计算的性能参数增加, 过程更为详细, 能够量化分析驾驶员操纵、环境因素、横向操纵对起降性能产生的影响。
1 飞行仿真模型设计 1.1 运动方程模型飞行仿真的基本任务是建立飞机的运动方程, 为了确定飞机的实际位置还引入了经纬度方程。研究过程中做以下2点假设:
1) 将飞机视为绝对刚体, 忽略结构的弹性变形、旋转部件的陀螺效应和液体燃料的晃动。
2) 视地球为不旋转的平坦大地, 忽略地球旋转和曲率影响[7]。
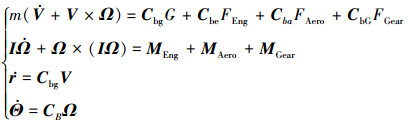
运动方程组如下
|
(1) |
式中:V, Ω, r, Θ和I为体轴系下速度、角速度、位置、角度向量和惯量矩阵;G, F, M为重力、外部作用力和力矩;C为坐标转换矩阵, 下标bg, be, ba, bG代表从惯性系、发动机坐标系、风轴系、起落架坐标系到机体系的转换矩阵; CB为3个欧拉角速度变换的正交矩阵之和。
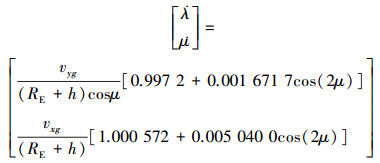
经纬度方程如下
|
(2) |
式中:λ为经度; μ为纬度; RE为地球半径。
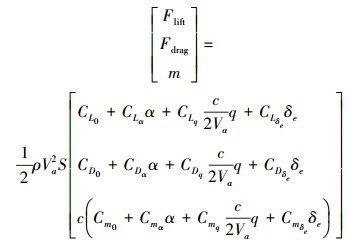
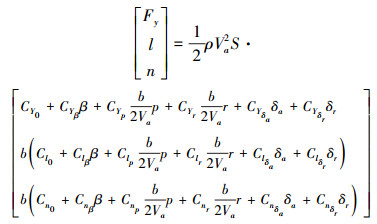
1.2 空气动力学模型作用在飞机上的气动力是一个分布力, 可以将其简化为对某一点的一个集中力和对该点的集中力矩。气动力可分解为风轴系下的阻力、升力、侧力和机体系下的俯仰、滚转、偏航力矩, 每个力或力矩均可写成力与力系数的乘积。作用力与力系数的函数关系如下[8]:
|
(3) |
|
(4) |
式中:CL, CD, Cm, CY, Cl, Cn为气动力系数; α, β为迎角、侧滑角; δe, δa, δr为升降舵、副翼、方向舵偏角, 地面效应、起落架和外挂载荷的影响以增量的形式给出。
1.3 发动机模型本文以喷气式发动机模型作为建模对象, 发动机为双转子。推力模型中, 只关注高压转子的转速, 将发动机的推力、油耗以数据库的形式输入。计算变量包括高度、速度、温度和转速, 模型如下:

|
(5) |

|
(6) |
式中, p为发动机推力, q为发动机油耗。
民航客机着陆时发动机需提供反推力, 因此建模中还需输入反向转速所对应的推力和油耗。对应油门刻度与正转相反, 输出推力与正转反向。
发动机有多种工作状态, 如慢车、巡航、最大、加力, 不同状态油门的位置不同, 稳态转速也不相同。由于发动机转子具有惯性且受力复杂, 当前转速不会随着油门位置改变立即达到目标转速, 此过程可按“二阶环节”进行模拟[9]。即
|
(7) |
起落架模型用于计算飞机在地面运动时受到的力和力矩。不同的起落架布置方式和飞机的运动状态产生不同的反作用力和力矩[10]。本文研究的飞机采取前三点式起落系统, 包含1个前起落架和2个主起落架。主起落架由减震器、机轮和刹车组成, 可以控制地面滑行速度; 前起落架无刹车多前轮转向, 可控制滑行方向[11]。
将起落架模型设计为多层系统, 即:机轮、刹车、空气减震器为底层, 前、主起落架为中间层, 三点式起落架系统为顶层, 如图 1所示。

|
| 图 1 起落架模型层次 |
机轮模型用于表征不含特定刹车装置轮子的基本特性, 该模型可计算飞机地面运动过程的支撑力, 纵向阻力很小的滚动摩擦力以及侧向阻力很大的滑动摩擦力。侧向摩擦力与轮子的侧向变形和变形速度相关[12], 机轮侧向变形如下:

|
| 图 2 机轮变形图 |
静摩擦力的计算根据轮子某个方向的变形量与变形速度进行表示
|
(8) |
式中:k为轮子在特定方向的变形刚度; μ为轮子在特定方向变形速度的阻尼力系数。
机轮受到滑动摩擦力或滚动摩擦力如下

|
(9) |
式中,fskid/roll为动摩擦因数, 和表面材质和运动速度有关。
1.4.2 刹车模型刹车模型可计算飞机刹车过程的相关参数, 包括刹车输入量、停机刹车程度、刹车系统最大力矩、刹车防滑。刹车装置是用于控制轮子和支撑面之间纵向摩擦力的系统, 轮子和支撑面之间存在最大摩擦力, 刹车模型对纵向摩擦力的控制无法超越这一极限。
1.4.3 空气减震器空气减震器由空气弹簧和油液阻尼器组成, 用于缓解飞行器着陆接地的冲击力, 衰减飞机在地面滑行时由颠簸产生的振动, 还能提高轮胎的抓地效果。支撑力分为两部分:一部分为静态支撑力, 即减震器提供的“空气弹簧”反力;另一部分为活塞伸缩过程中油液产生的阻尼力。
空气弹簧可视为一个气缸-活塞副围成的可伸缩气柱, 气柱的长度大于零。气柱长度和压缩力的关系用指数函数进行代替。当其处于机械结构限制的活塞极限长度时, 其内部气压仍远大于外界大气压, 此时气柱的压力称为“填充”压力, 使得活塞的压缩存在一个“启动力”, 当外部压缩小于此力时, 活塞不会被压缩。因此在小于启动力的区域设计一段压缩位移, 将空气弹簧的支撑力延伸为零。油液阻尼器在活塞伸缩时推动油液经由小孔流过, 提供伸缩过程中的阻尼力。
根据飞行器和支撑面的相对位置和速度计算减震器产生的支撑力, 具体如下
|
(10) |
式中, 活塞坐标为x(压缩为负, 最大为xpre), 空气支柱不会被压缩至零, 但数值计算中可能出现。为了保证模型的稳定计算, 设计了判断点x1, 如果活塞的坐标小于x1时, 取该点的切线计算支撑力。
模型的伸缩阻尼力计算公式为
|
(11) |
空气减震器总的支撑力为:
单起落架模型综合机轮、刹车、减震器计算起落架处于放下状态时飞机受到的支撑力和各轮的摩擦力。流程如下:

|
| 图 3 起落架模型解算流程 |
轮轴轨迹位于体轴系, 先将轮轴上点的坐标转换至同航向地轴系上。轮轴上的点在机体系上的投影为riC, 坐标转换公式为
|
(12) |
式中,CbG1是机体系到同航向地面系的转换矩阵。
其次判断机轮是否触地, 假设存在一个与地面的距离等于机轮半径的平面, 称该平面为“地面1”。根据轮轴轨迹最低点的垂直高度是否在地面1以上判断机轮是否触地。对轮轴轨迹和活塞行程函数取逆得到减震器活塞位置, 即
|
(13) |
根据轨迹函数计算轮轴中心点在各个坐标系的位置, 再计算起落架的垂直传动比KAB, 结合活塞运动速度得出活塞伸缩速度, 最后通过减震器模型计算出地面支撑力。
假设活塞当前支撑力为FAB, 虚位移为ΔxAB, 轮轴中心点的切向支撑力为FAt, 其虚位移为ΔsA, 则轮轴当前支撑力为
|
(14) |
式中,KAB为传动比。
1.5 动态质量模型质量模型用于衡量飞机燃油质量、总质量、飞机重心位置和转动惯量等参数。模型可动态考虑燃油消耗对质量特性的影响。
运输机或民航客机一般装有多组油箱, 其分布关于对称面对称。定义不同油箱的编号, 输入燃油时按照特定顺序加油, 如“台阶式”加油系统, 最先加满的油箱最后用空[13]。
用一组以燃油量为自变量的函数组描述每一个部分的重量、重心坐标、转动惯量等属性。实时质心与转动惯量计算如下:
|
(15) |
|
(16) |
式中, rCG为质心位置向量, ICG为转动惯量矩阵, 下标emp为空机, fuel代表各组油箱。
根据飞机的初始状态对运动方程组和各个模型赋初值。输入海拔高度、经纬度、地面温度、风速、跑道方向进行飞行环境初始化。并对起落架模型完成地面运动初始化; 着陆还需进行配平操纵。
模型单步解算流程为:①动态质量模型的单步解算, 计算燃油消耗后的质量特性; ②判断当前操纵指令, 即飞机的襟翼状态、各操纵量的值, 解算飞机所受气动力/力矩; ③发动机模型的解算, 计算推力和油耗; ④当飞机处于地面滑行阶段时, 调用起落架模型计算地面对飞机的支持力和力矩; ⑤汇总全部作用力和力矩完成运动方程的一步求解, 得到运动轨迹、位置、速度和姿态; ⑥判断飞机状态是否安全, 飞行参数满足条件后仿真结束, 输出性能参数。
2 起飞性能仿真研究 2.1 不同起飞方式定义根据起飞发动机是否失效分为单发起飞和双发起飞。双发起飞中, 按照飞行员的驾驶习惯, 还可分为两点式和三点式起飞。
三点式起飞(standard take-off):飞机静止于跑道起点, 发动机加速至最大状态, 松刹车开始加速。当速度增加至抬前轮速度VR时, 驾驶员操纵升降舵使飞机抬头。当达到离地速度Vlof时, 飞机离地。当飞机达到起飞安全高度Hsafe时飞机速度为起飞安全速度V2。
两点式起飞(AoA hold take-off):飞机的加速过程与三点式一致。离地前, 驾驶员操纵升降舵使飞机按照给定离地速度VG和离地迎角αG离地。离地后, 保持该姿态爬升至起飞安全高度Hsafe。
单发起飞(take-off with OEI):飞机加速至单发失效速度VEF时单台发动机停车。飞机保持加速2 s, 该速度大于决策速度V1。驾驶员进行姿态稳定与侧向纠偏操纵,其余过程与三点式起飞一致。
中断起飞(reject take-off):分单发中断起飞(OEI reject take-off)和双发中断起飞(AEO reject take-off)。当飞机的发动机发生故障, 速度低于决策速度V1时, 飞机中断起飞。驾驶员打开刹车、减速伞、扰流板、收油门, 民航客机还需打开发动机发推力使飞机尽快降低速度[14]。

|
| 图 4 不同起飞方式示意图 |
1) 三点式起飞
发动机为最大状态, 松刹车飞机加速。加速至抬前轮速度时, 记录该状态全部参数。输入升降舵操纵量δe0, 以离地速度和状态作为判断条件搜索操纵量, 满足误差条件后记录该状态。当飞机离地爬升至起飞安全高度后, 以高度和速度作为判断条件搜索操纵量。
优化搜索模型为
|
(17) |

|
| 图 5 起飞仿真轨迹图 |
2) 两点式起飞
两点式起飞仿真从数据准备至加速到抬前轮速度与三点式起飞相同。离地阶段以迎角和离地速度为判断条件, 搜索操纵量。飞机进入离地爬升段后切换为纵向姿态保持模式, 爬升至起飞安全高度完成仿真。
3) 单发停车起飞
飞机加速至单发故障速度VEF时, 一发失效, 保持该状态2 s并记录。以姿态稳定和侧偏满足要求作为判断条件, 搜索方向舵和副翼操纵量。满足条件后的升降舵操纵量搜索过程与三点式起飞一致。
4) 中断起飞
单发中断起飞, 飞机从静止加速至单发失效速度VEF与单发起飞一致。2 s后根据飞机平衡搜索方向舵和副翼操纵量, 此时飞机速度为决策速度V1, 2 s后发动机完全停车并采取减速措施直至飞机停止。双发中断起飞, 飞机从松刹车加速至发动机故障速度后双发停车, 2 s后开始减速直至飞机完全停止。4种起飞仿真流程如下:

|
| 图 6 起飞仿真流程图 |
着陆过程分为3段, 定轨迹角下滑、拉平、接地减速。飞机从着陆安全高度(离地15 m)开始, 保持着陆进场速度VAPP和给定轨迹角下滑。到达拉平高度时(距离地面5~10 m), 驾驶员开始拉平操纵, 飞机以着陆接地速度VTD接地后打开减速装置减速停止[15]。如图 7所示。

|
| 图 7 飞机着陆过程图 |
1) 定轨迹角下滑阶段
与起飞仿真一致, 以进场速度VAPP、接地速度VTD作为参考速度。输入下滑轨迹角、初始高度、着陆进场速度, 设置着陆襟翼、起落架放下、发动机慢车状态。配平后下滑至拉平高度。
2) 拉平接地阶段
以拉平高度, 开始飞机逐渐退出稳定下滑转为拉平姿态, 降至距离地面0.5~1.0 m时, 拉平结束飞机以接地速度接地。通过改变升降舵的操纵量, 保持飞机从拉平高度下降到接地高度、轨迹角从下滑角接近于0、接地速度接近于着陆接地速度。俯仰角与空速指令如下:
|
(18) |
3) 接地减速停止阶段
飞机主轮接地后, 飞机姿态稳定, 油门为零、发动机停车、打开减速装置。飞机减速过程中驾驶员需要打开减速伞、扰流板, 为了满足安全要求, 还需点踩刹车进行减速控制。对于民航客机, 驾驶员需要打开发动机反推、打开扰流板。发动机反推需输入反向油门, 当飞机在滑跑过程中受到干扰或需航线控制时, 通过操纵前轮转向、方向舵和副翼实现纠偏。刹车指令如下:

|
(19) |
着陆仿真计算流程如下:

|
| 图 8 着陆仿真流程 |
本文通过Visual C++完成了起降性能计算程序实现。算例取机场海拔高度500 m, 温度10℃, 无风条件, 某型正常式布局飞机在不同重量下进行起降性能仿真计算, 程序界面如图 9所示。

|
| 图 9 起飞着陆程序界面 |
不同重量对应的起飞着陆速度如图 10所示, 抬前轮速度VR到离地速度Vlof跨度较大, 三点式和单发起飞驾驶员按照速度线操纵, 两点式起飞的离地速度需单独给出。

|
| 图 10 不同质量对应的起飞速度 |
不同起飞方式下的起飞滑跑距离和起飞距离如图 11所示, 单发起飞距离最长。大于55 t时, 单发起飞滑跑距离大于两点式和三点式起飞距离, 因此在单发起飞过程中, 驾驶员尽量在决策速度前将飞机改为中断起飞。在单发起飞科目训练时, 除横向操纵保证纠偏和姿态稳定的同时需满足注意跑道长度条件。三点式起飞距离与参考速度相关, 两点式起飞滑跑距离较长, 二者离地过程均较为短暂, 空中段基本相同。60 t以下的两点式起飞滑跑距离约为三点式起飞滑跑距离的1.2倍。当跑道长度相对较短、驾驶员操纵轻型飞机时, 采用三点式起飞方式得到的起飞距离较短。跑道长度较长、驾驶员操纵重型飞机时, 宜采用两点式起飞。当飞机在高原起飞时, 飞机推力受限, 三点式起飞难度加大、且滑跑距离增加, 适宜采用两点式起飞, 滑跑过程中通过姿态保持获得较长时间的速度积累。

|
| 图 11 不同起飞方式起飞距离 |
4°和6°起飞迎角两点式起飞距离如图 12所示, 飞机保持离地迎角越小, 滑跑的距离越长。相同质量情况下, 较小的离地迎角对应较大的离地速度, 因此起飞空中段迎角越小飞行距离越短。当飞机在高原起飞或发动机推力欠缺时, 为保证安全起飞, 需采取小迎角两点式起飞方式。飞机质量为68 t时, 4°和6°起飞距离基本相同。针对同型民航客机按照座位数不同划分的子型号, 起飞质量较大者需对应较小的离地迎角。中断起飞距离如图 13所示, 仿真中单/双发故障速度相同, 对于算例飞机, 双发中断起飞距离较单发中断长200 m。实际中按照单发和双发中断起飞距离中的较大者确定跑道最短长度。当跑道长度确定后, 以故障速度为变量, 多次仿真可确定发动机最大故障速度; 若以起飞质量为变量, 可以确定起飞限重。在中断起飞科目训练时, 单发中断起飞需进行姿态保持和纠偏操纵, 民航飞机超过决策速度后还需打开发动机反推, 使飞机尽快减速保证安全。着陆仿真的环境条件初始化与起飞一致, 得出不同质量、不同着陆下滑角着陆速度如图 14所示。飞机以3°和4°轨迹角下滑, 着陆距离如图 15所示。运输机可按标准着陆程序仿真, 民用飞机进场前为保证安全, 需判断高度、侧偏、速度是否满足条件, 即“着陆窗口”。仿真输入判断条件的极限值, 当下滑过程中参数超限时, 仿真切换为复飞, 重新进入着陆。通过机场突发影响因素下着陆的仿真, 可以确定飞机的着陆安全边界。

|
| 图 12 4°和6°起飞迎角两点式起飞距离 |

|
| 图 13 单发中断起飞与双发中断起飞 |

|
| 图 14 不同质量着陆进场速度与接地速度图 |

|
| 图 15 3°和4°下滑角着陆距离 |
质量、进场速度和下滑轨迹角是影响着陆性能的3个关键因素。飞机质量主要影响着陆进场速度和接地速度。着陆空中段的时间低于滑跑减速段, 下滑轨迹角越大着陆空中段距离越短, 质量对其影响较小。与起飞过程类似, 当跑道长度确定后, 分别以质量、进场速度、轨迹角为变量, 多次仿真可以确定这3个参数的极限值。着陆接地后采取迅速减速停止的操纵方式, 运输机减速的主要手段为点踩刹车、民航客机通过发动机反推减速。因此接地滑跑段距离除质量相关外还与飞机采取的减速方式、刹车程度相关。对于轻型飞机, 进场速度可以降低, 下滑轨迹角可以增大。对于重型飞机, 为保证安全, 首先确保进场速度稳定, 在跑道距离足够的条件下可以适当降低下滑轨迹角。综合中断起飞、单发起飞、着陆距离中最大值为机场跑道长度的确定提供依据。
5 结论1) 本文从某型常规布局飞机起降性能计算入手, 针对飞机起降过程中涉及的影响因素多、参数精度高的特点, 提出了采用飞行仿真技术进行不同飞行方式下起飞和着陆过程的模拟计算起降性能的方法。与传统分段积分、三自由度仿真的方法相比算法复杂度更高、对计算资源的要求更高、所得参数多、精度高、过程更加细致。在方案论证、型号设计初期可采用前2种方法进行定性判断, 进入详细设计、飞机运营和试飞阶段宜采用该方法进行量化分析, 提高性能计算的准确性。
2) 针对飞机所包含的各个部分、起降飞行过程的特点建立了适用于该过程的飞行仿真模型。结合驾驶员的实际操纵设计了相应的仿真计算方法, 并完成了相应的程序开发, 并根据计算结果给出了驾驶员在不同海拔高度、不同种类飞机在起降过程中的操纵建议。
| [1] | SENGUPTA S, DONEKAL A K, MATHUR A R. Automation in Modern Airplanes-A Safety and Human Factors Based Study[C]//INCOSE International Symposium, 2016: 386-394 |
| [2] |
宋花玉, 蔡良才. 飞机起飞航迹计算中发动机推力计算方法[J]. 交通运输工程学报, 2011(2): 59-63.
SONG Huayu, CAI Liangcai. Computational Method of Engine Thrust in Aircraft Take-Off Track Calculation[J]. Journal of Traffic and Transportation Engineering, 2011(2): 59-63. (in Chinese) DOI:10.3969/j.issn.1671-1637.2011.02.010 |
| [3] |
蔡良才, 王海服, 朱占卿, 等. 高原机场飞机起飞滑跑距离计算方法[J]. 交通运输工程学报, 2013, 13(2): 66-72.
CAI Liangcai, WAN Haifu, ZHU Zhanqing, et al. Calculation Method of Running Distance for Aircraft Takeoff on Plateau Airport[J]. Journal of Traffic and Transportation Engineering, 2013, 13(2): 66-72. (in Chinese) DOI:10.3969/j.issn.1671-1637.2013.02.010 |
| [4] |
张立, 石怀林, 涂丛润. 某飞机着陆的数值计算[J]. 计算机辅助工程, 2011, 20(1): 94-96.
ZHANG Li, SHI Huailin, TU Congrun, et al. Numerical Computation on Aircraft Landing[J]. Computer Aided Engineering, 2011, 20(1): 94-96. (in Chinese) DOI:10.3969/j.issn.1006-0871.2011.01.021 |
| [5] |
王辉, 张伟方. 计算机环境下的实时飞行仿真系统的构建[J]. 机械科学与技术, 2011, 30(8): 1235-1238.
WANG Hui, ZHANG Weifang. Construction of a Real-Time Flight Simulation System Based on Computer Environment[J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(8): 1235-1238. (in Chinese) |
| [6] |
林可心, 岑国平. 飞机起飞着陆性能仿真与分析[J]. 空军工程大学学报, 2012, 13(4): 21-25.
LING Kexin, CEN Guoping. Simulation and Analysis for Airplanes' Performance of Takeoff and Landing[J]. Journal of Air Force Engineering University, 2012, 13(4): 21-25. (in Chinese) DOI:10.3969/j.issn.1009-3516.2012.04.005 |
| [7] | STENGEL R F. Flight Dynamics[M]. NJ: Princeton University Press, 2004. |
| [8] | BEARD R W, MCLAIN T W. Small Unmanned Aircraft:Theory and Practice[M]. NJ: Princeton University Press, 2012. |
| [9] |
史莹晶. 航空飞行器控制与仿真[M]. 西安: 电子科技大学出版社, 2011: 55-58.
SHI Yingjin. Control and Simulation of Aviation Airacrafts[M]. Xi'an: The University of Electronic Science and Technology Press, 2011: 55-58. (in Chinese) |
| [10] |
李波, 焦宗夏. 飞机起落架系统动力学建模与仿真[J]. 北京航空航天大学学报, 2007, 33(1): 46-49.
LI Bo, JIAO Zongxia. Aircraft Landing Gear System Dynamic Modeling and Simulation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(1): 46-49. (in Chinese) |
| [11] |
甘欣, 伍智敏, 席锋. 多轮轴飞机转弯滑行的行驶阻力分析[J]. 航空科学技术, 2016, 27(12): 47-52.
GAN Xin, WU Zhimin, XI Feng. Turning-Taxiing Driving Drag Analysis of Aircraft with Mlti-Axle[J]. Aeronautical Science & Technology, 2016, 27(12): 47-52. (in Chinese) DOI:10.3969/j.issn.1007-5453.2016.12.010 |
| [12] |
甘欣. 飞机地面运动的静摩擦力模型[J]. 航空科学技术, 2016(6): 34-38.
GAN Xin. A Static Friction Model of Aircraft Motion on Ground[J]. Aeronautical Science & Technology, 2016(6): 34-38. (in Chinese) |
| [13] |
罗伊·兰顿. 飞机燃油系统[M]. 上海: 上海交通大学出版社, 2010: 86-90.
LANGTON R. Aircraft Fuel System[M]. Shanghai: Shanghai Jiaotong University Press, 2010: 86-90. (in Chinese) |
| [14] | ZHU Y, WANG J, CHEN Y, et al. Calculation of Takeoff and Landing Performance under Different Environments[C]//International of Modern Physics Conference Series, 2016: 1660174 |
| [15] |
金长江, 范立钦, 周士林. 飞行动力学——飞机飞行性能计算[M]. 北京: 国防工业出版社, 1983: 207-216.
JIN Changjiang, FAN Liqin, ZHOU Shilin. Flight Dynamics——Aircraft Flight Performance Calculation[M]. Beijing: National Defense Industry Press, 1983: 207-216. (in Chinese) |
2. Science and Technology of UAV Laboratory, Northwestern Polytechnical University, Xi'an 710065, China
