

2. 国网定州市供电公司, 河北 定州 073000;
3. 山西省电力公司检修分公司, 山西 太原 030000
永磁同步电机具有体积小、质量轻、功率因数高的特点, 因而被广泛应用。然而, 永磁体产生的磁场固定而不可调节, 为了提高同步电机转速, 在新能源汽车及伺服驱动系统中, 往往需要其运行于弱磁调速状态。
内置式永磁同步电机弱磁调速采用最大转矩电流比MTPA(maximum torque per ampere control)控制策略, 可以最大程度地利用磁阻转矩, 提高同一定子电流下电机的驱动能力。但是, 该方法在获得d, q轴电流给定值时, 需要求解一个非线性高次方程组, 该高次方程组无法获得解析解。国内外对该问题做了一些研究, 文献[1]将迭代法应用到控制策略中, 得到需要的d, q轴电流给定, 具有一定的工程实用性, 但其过程比较复杂, 不易数字实现; 文献[2]先离散测试电机各个状态下的参数, 然后制作成表格, 可以实时根据工况查询所需值, 但是该方法需要大量存储空间; 文献[3]在转矩给定的情况下, 利用定步长改变电流矢量角从而改变电流轨迹, 但是在变负载时, 系统稳定性很难保证。采用MTPA控制策略, 一方面电流给定较难确定; 另一方面, MTPA输出转矩最大点的转速, 受到逆变器最大输出电压Usmax的限制。为了提高逆变器的输出电压最大值, 必须采用过调制的控制策略。文献[6]根据电压零矢量作用时间, 利用查表法确定调制比, 实现了过调制算法, 但是该算法需要大量的离线数据。文献[7]比较了双模式过调制方法和单模式过调制方法的优缺点, 指出了各自适用的场合; 文献[8]提出基于三相桥臂坐标系的算法, 取消了扇区的概念, 简化了计算过程, 统一了线性区和过调制区的算法, 但文中该方法用在开环控制系统, 未对闭环控制系统做进一步研究; 文献[9]将最小幅值误差过调制应用在电机闭环控制系统中, 虽然方法简单, 但考虑因素较少, 对电机控制性能有一定影响。
本文针对MTPA控制策略中, d, q轴电流给定值无法获得解析解的问题, 提出了一种多项式曲线拟合的方法求解高次方程组, 得到了不同转速要求时的交直轴电流给定值, 该方法易于实现, 控制精度较高; 同时, 利用梯度下降法, 实现电机从中低速向高速过渡, 并在弱磁调速高速区, 提出了一种新的过调制算法, 根据合成电压矢量的幅值和相角, 将电机的调制区分为4个区域:线性区、过调制Ⅰ区、过调制Ⅱ区和六拍工作区。控制系统对合成电压矢量时时监测, 可自动实现不同调制区的转换。该算法只关注合成电压矢量幅值和相角, 目标明确, 实现相对容易。仿真和实验结果表明, 本文所提出的过调制控制方案, 使得电机在转速一定的情况下, 提升了电机带负载能力, 在负载转矩一定的情况下, 拓宽了永磁同步电机弱磁调速范围。
1 过调制弱磁控制系统结构永磁同步电机弱磁控制系统结构框图如图 1所示, 在MTPA弱磁控制策略基础上, 采用曲线拟合方法对其进行多项式拟合, 得到交直轴电流给定指令, 根据梯度下降法对电流指令进行修正, 利用过调制控制方案, 扩大电机的稳态运行区。

|
| 图 1 弱磁控制系统结构框图 |
对永磁同步电机来说, 当转矩一定时, 理论上转矩曲线上的电流点都可以满足要求, 但这些电流矢量中幅值最小的, 能够输出同样的转矩, 是最优的电流矢量。所有的这些点的集合就组成了MTPA曲线, 如图 2中OA段。

|
| 图 2 弱磁控制下电压、电流、转矩轨迹 |
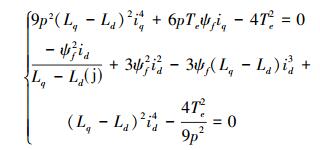
MTPA曲线上的交直轴电流给定值由Te与id, iq关系式决定:
|
(1) |
由(1)式可见, 该关系式为二元四阶高次方程组, 无法得到d, q轴电流对应的解析解。本文对2个高次方程所对应的平面曲线进行拟合, 在maltlab环境下, 画出约束关系曲线, 然后在曲线上取得足够多的点, 利用cftool工具箱, 得到拟合曲线如图 3所示。

|
| 图 3 MTPA拟合曲线 |
忽略饱和因素带来的影响, 所用样机参数:P=2.2 kW, UN=380 V, IN=4.17 A, p=2, Rs=2.69 Ω, Ld=0.063 2 H, Lq=0.122 6 H, J=0.015 3 kg·m2, nN=1 500 r/min。
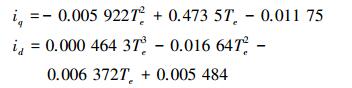
利用电机参数, 可得多项式拟合函数为:
|
该拟合曲线的SSE(和方差)为0.000 858 5, RMSE(均方差)为0.005 537, R-square(确定系数)为1, 表明多项式对高次方程的拟合具有较高的精度。
1.2 过调制控制方法在两电平逆变器中, 总共有8个基本电压矢量, 这8个电压矢量通过平行四边形法则可以合成任意方向的矢量, 但是逆变器输出的电压矢量, 终端不能落在空间矢量六边形区域外。永磁同步电机弱磁调速时, 为了增加电机弱磁调速范围, 增大最大输出电压, 在高速区电压矢量可能在六边形区域外, 此时, 可以通过改变给定电压的相角和幅值, 使得合成电压矢量落在正六边形边界上, 这种调整就是过调制控制方案。
本文通过对电压矢量的监测, 把调制区分成4个部分:线性调制区、过调制Ⅰ区、过调制Ⅱ区和六拍工作区, 过调制原理如图 4所示。

|
| 图 4 过调制原理图 |
1) 线性调制区
如图 4a)和图 4b)所示, 以O为圆心, OA为半径的圆形区域, 为线性调制区, 该区域内电压矢量和磁链矢量的轨迹为标准的正圆, 所给定电压矢量的幅值小于
2) 过调制Ⅰ区域
如图 4a)和图 4b)所示, 在弱磁调速中, 当转速给定值较大时, 电压合成矢量U*的幅值在
调整后的电压矢量在第一扇区的表达式为公式(2), 其他扇区同理:
|
(2) |
式中, Uα*和Uβ*为给定电压矢量U*在α轴, β轴的电压分量。
这种控制算法仅改变了电压矢量幅值, 没有改变相位, 所以磁链依然接近于圆形。
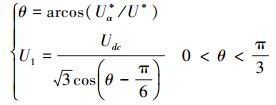
3) 过调制Ⅱ区
如图 4a)和图 4b)所示, 在弱磁调速中, 当合成电压矢量U*的幅值大于2Udc/3且小于
调整后的电压矢量在第一扇区的表达式为公式(3), 其他扇区同理

|
(3) |
式中
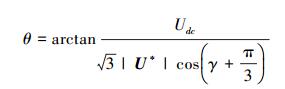
|
γ为参考向量U*与OA之间的夹角, γ′为调制后的向量U2与OA之间的夹角。
4) 六拍工作区
如图 4a)和图 4b)所示, 当合成电压矢量的幅值大于
调整后的电压矢量在第一扇区的表达式为公式(4), 其他扇区同理:

|
(4) |
如图 2所示, OA为MTPA运行区域, 曲线AB段为恒功率运行区域, 在OABC包络线范围之内为恒转矩工作区域, 曲线BC段id达到限幅值。
在弱磁低速区, 电机沿着MTPA曲线运行, 在弱磁高速区, 电流沿着恒转矩方向修正, 修正值为:
|
(5) |
(5) 式中, α为修正系数, ΔU为给定电压与反馈电压的差值, T为转矩的梯度, Td, Tq为T的d, q轴分量。
在电机整个弱磁运行区域, 通过时时监测合成电压矢量的幅值和相角, 不同的调制区, 采用不同算法进行调制。该系统仿真模型如图 5所示。

|
| 图 5 过调制弱磁控制仿真模型 |
在基速以下, 电压矢量在线性调制区内, 其轨迹为圆形, 当转速达到基速时, 达到线性调制区内最大值, 此时电压矢量的轨迹为正六边形内切圆, 如图 6所示。随着转速的增加, 电机的工作状态进入过调制弱磁控制区域, 逆变器处于过调制阶段。从图 7可以看出, 电压矢量落在正六边形边界上, 过调制给弱磁控制区带来更多的电压余量, 增大了电压输出范围。

|
| 图 6 无过调制的电压矢量轨迹 |

|
| 图 7 有过调制的电压矢量轨迹 |
随着转矩和电流的上升, 电机的稳态工作点沿着MTPA曲线移动, 当达到电压极限椭圆和电流极限圆时, 所带载能力最大。
如图 8所示, A点是电压极限椭圆, 电流极限圆和MTPA三者的交点。忽略电机定子电阻压降, 该点的转速和转矩为:
|
(6) |

|
(7) |

|
| 图 8 电机稳态运行点 |
式中,
由(6)式和(7)式, 结合电机参数, 可得A点电机稳定运行速度为1 644.6 r/min, 电磁转矩为14.165 8 N·m。
从图 9可以看出, 仅采用SVPWM策略, 电机带额定负载时, 弱磁调速最大转速为1 544.5 r/min, 电机输出线电压基波幅值为529.4 V, 当加入过调制控制策略时, 可以达到给定转速, 电机的输出线电压基波达到561.1 V。在MTPA输出转矩最大点, 过调制的引入, 提高了逆变器输出电压, 扩大了电机弱磁调速范围。

|
| 图 9 A点转速对比图 |
电机给定转速为2 500 r/min, 由图 10和图 11可知, 2种策略下的控制系统d轴电流均达到限幅值-4 A。没有采用过调制的控制系统, 线电压基波幅值为530.6 V, 电磁转矩最大值为7.04 N·m, 运行在B点, 采用过调制的控制系统, 线电压基波幅值为556 V, 电磁转矩最大值为8.15 N·m, 运行在C点。明显可以看出, 在2 500 r/min的给定转速下, 过调制使得电机的输出转矩提升了1.11 N·m。

|
| 图 10 电机稳态运行点 |

|
| 图 11 同转速下, 带载能力的比较 |
只要电压矢量端点落在六边形之外, 就可以采用最小幅值误差过调制, 但这种方法同时改变了电压的相角和幅值, 而本文在一定范围内, 只调整幅值, 并未改变矢量相角, 只有满足一定条件, 才会过渡到幅值和相角都改变的阶段。
如图 12和图 13所示, 在1 750 r/min的转速下, 带10 N·m负载, 曲线1为电机稳态时, 仅用最小幅值误差过调制方法下的转速和转矩波形曲线, 曲线2为本文方法下的电机转速和转矩波形曲线。可以发现, 在同样参数情况下, 使用最小幅值误差过调制方法时, 电机转速波动为上下0.7 r/min, 而转矩波动为上下0.4 N·m; 而本文的转速波动为上下0.4 r/min, 转矩波动为上下0.3 N·m。仿真结果表明, 相同转速给定和PI参数的情况下, 在达到稳态时, 与最小幅值误差过调制相比, 本文的转速和转矩波动更小。

|
| 图 12 转速波动对比图 |

|
| 图 13 转矩脉动对比 |
为了更好的验证本文所提控制方案的正确性与实用性, 设计了主回路和控制回路, 搭建了2.2 kW永磁同步电机实验平台。系统采用TI公司的TMS320F2812为控制芯片, 采用CAN通信实现下位机与上位机的数据传输, 采样频率设定为4 kHZ。实验平台如下:
直流发电机作为永磁同步电机负载, 调节发电机励磁和电枢回路电阻可以调节负载大小。实验中保持额定电流不变, 通过调节转速指令, 可以实现电机不同转速下的运行。图 15~图 17中, 在电机额定负载条件下, a)图为未加入过调制图形, b)图为加入过调制图形。

|
| 图 14 永磁同步电机实验平台 |

|
| 图 15 转速对比图 |

|
| 图 16 相电流对比图 |

|
| 图 17 id, iq电流对比图 |
实验表明, 无过调制控制策略的情况下, 电机以额定电流运行, 所能达到的转速为1 510 r/min, 而有过调制控制时, 转速为1 590 r/min, 电机转速提高了80 r/min。实验与仿真相比, 起动时间要更长, 且速度要比仿真略低, 这是因为与理想的仿真模型相比, 电压在传输过程中, 经过逆变器等设备, 会发生电压降落。从相电流波形中可以发现, 带有过调制的控制策略, 启动电流更大, 加速性能更好。在id, iq的波形中可以看出, 两者的稳态值在给定的MTPA曲线上波动, 稳定的直轴电流为-2A, 交轴电流为5.4 A, 电流给定指令精度较高。
通过控制器, 保持电机给定转速2 500 r/min恒定运行, d轴电流限幅值设定为-4 A, 在保证PI参数相同的情况下, 通过调节负载, 使得d轴电流向限幅值趋近, 电机达到稳态时, 2种控制方式下id, iq波形曲线如图 18所示。

|
| 图 18 同转速下, id, iq电流对比图 |
其中, 图 18a)和18b)分别为无过调制和有过调制下的d, q轴电流曲线, 可以发现, 在d轴电流相近的情况下, 使用不带过调制控制策略时, q轴电流在1.85 A附近波动, 使用带过调制的控制策略时, q轴电流在2.2 A附近波动, 后者比前者提升了0.35 A, 意味着电机带载能力更强。
给定电机转速1 750 r/min, 保证直流电机发电机励磁电流和负载电阻相同的情况下, 仅用最小幅值过调制和本文所提出的过调制控制方式, 稳态转速对比曲线如图 19所示。

|
| 图 19 转速波动对比图 |
其中, 图 19a)和19b)分别为仅用最小幅值过调制和本文所提过调制控制策略下的稳态转速波形。在相同实验条件下, 电机达到稳定运行状态。使用最小幅值误差过调制方法时, 电机转速波动为上下3 r/min; 而本文过调制方法下的转速波动为上下2 r/min, 与仅含有最小幅值误差过调制相比, 本文的转速波动更小。
5 结论本文在低速弱磁区, 对最大转矩电流比采用曲线拟合方法, 实现了交直轴电流较准确给定, 电机可以稳定地运行在所划定的电流轨迹上。同时, 提出一种新的过调制控制策略, 根据不同调制区, 采用不同的方法, 通过对电压合成矢量幅值和相角的优化, 增加了弱磁区的电压裕度。仿真和实验结果表明, 采用过调制的弱磁算法与无过调制的弱磁算法相比, 增加了电机的带载能力, 扩展了永磁同步电机的调速范围。
| [1] |
李长红, 陈明俊, 吴小役. PMSM调速系统中最大转矩电流比控制方法的研究[J]. 中国电机工程学报, 2005, 25(21): 172-177.
Li Changhong, Chen Mingjun, Wu Xiaoyi. The Study of The Maximum Torque per Ampere Control Strategy of Permanent Magnet Synchronous Motor Speed Regulation System[J]. Proceedings of the CSEE, 2005, 25(21): 172-177. (in Chinese) |
| [2] | Consoli G, Scarcella G, Scelba A Testa. Steady-State and Transient Operation of IPMSMs under Maximum-Torque-per-Ampere Control[J]. IEEE Trans on Industry Applications, 2010, 46(1): 121-129. DOI:10.1109/TIA.2009.2036665 |
| [3] | Dianov, Kim Young-Kwan, Lee Sang-Joon, et al. Robust Self-Tuning MTPA Algorithm for IPMSM Drives[C]//2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, 2008: 1355-1360 |
| [4] |
盛义发, 喻寿益, 桂卫华, 等. 轨道车辆用永磁同步电机系统弱磁控制策略[J]. 中国电机工程学报, 2010, 30(9): 74-79.
Sheng Yifa, Yu Shouyi, Gui Weihua, et al. Permanent Magnet Synchronous Motor System Magnetic Flux Control Strategy for Track Vehicle[J]. Proceedings of the CSEE, 2010, 30(9): 74-79. (in Chinese) |
| [5] |
吴芳, 万山明, 黄声华. 一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J]. 电工技术学报, 2010, 25(1): 58-63.
Wu Fang, Wan Shanming, Huang Shenghua. An Over-Modulation Algorithm and Application in Permanent Magnet Synchronous Motor Flux-Weakening Control Strategy[J]. Trans of China Electrotechnical Society, 2010, 25(1): 58-63. (in Chinese) |
| [6] |
梁振鸿, 温旭辉. 应用过调制技术扩展永磁同步电机运行区域[J]. 电工电能新技术, 2003, 22(1): 39-42.
Liang Zhenhong, Wen Xuhui. Applying Over-Modulation Technology to Extend the Operating Area of Permanent Magnet Synchronous Motor[J]. Advanced Technology of Electrical Engineering and Energy, 2003, 22(1): 39-42. (in Chinese) DOI:10.3969/j.issn.1003-3076.2003.01.010 |
| [7] |
张艳芳, 林飞, 马志文, 等. 2种SVPWM过调制方法的比较研究[J]. 北京交通大学学报, 2005(2): 39-43.
Zhang Yanfang, Lin Fei, Ma Zhiwen, et al. Comparative Study of Two Methods of SVPWM Over-Modulation[J]. Journal of Beijing Jiaotong University, 2005(2): 39-43. (in Chinese) DOI:10.3969/j.issn.1673-0291.2005.02.009 |
| [8] |
吴德会, 夏晓昊, 张忠远, 等. 基于三相桥臂坐标的SVPWM过调制方法[J]. 电工技术学报, 2015, 30(1): 150-158.
Wu Dehui, Xia Xiaohao, Zhang Zhongyuan, et al. SVPWM Over Modulation Method Based on Three Phase Bridge Arm Coordinates[J]. Trans of China Electrotechnical Society, 2015, 30(1): 150-158. (in Chinese) DOI:10.3969/j.issn.1000-6753.2015.01.020 |
| [9] |
范晓坤.永磁同步电动机变频控制系统硬件设计及弱磁调速[D].太原: 太原理工大学, 2016 Fan Xiaokun. Hardware Design of Variable Frequency Control System for Permanent Magnet Synchronous Motor and Flux Weakening Speed Regulation[D]. Taiyuan, Taiyuan University of Technology, 2016(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10112-1016715121.htm |
| [10] | Wang Y, Wen X, Zhao F. A Proposed Control Strategy of Pmsm for Deep Field-Weakening and Square-Wave Mode[C]//2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, 2012: 1-6 |
| [11] |
朱磊, 温旭辉, 赵峰, 等. 永磁同步电机弱磁失控机制及其应对策略研究[J]. 中国电机工程学报, 2011, 31(18): 67-72.
Zhu Lei, Wen Xuhui, Zhao Feng, et al. Study on the Mechanism of Magnetic Flux Loss of Permanent Magnet Synchronous Motor and Countermeasures[J]. Proceedings of the CSEE, 2011, 31(18): 67-72. (in Chinese) |
| [12] |
方晓春, 胡太元, 林飞, 等. 基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制[J]. 电工技术学报, 2015, 30(2): 140-147.
Fang Xiaochun, Hu Taiyuan, Lin Fei, et al. Flux Weakening Control of Permanent Magnet Synchronous Motor Based on Single Current Regulator with Quadrature Axis and Direct Axis Current Coupling[J]. Trans of China Electrotechnical Society, 2015, 30(2): 140-147. (in Chinese) DOI:10.3969/j.issn.1000-6753.2015.02.019 |
2. Dingzhou Power Supply Company of State Grid, Dingzhou 073000, China;
3. Maintenance Branch of Shanxi Electric Power Company, Taiyuan 030000, China
