

当前,中小型电驱动多旋翼无人机已经成为消费电子、农药喷洒、交通监控、环保执法、电力巡检、军事侦查等领域重要的研究热点并且已得到广泛应用。随着这类无人机使用频度和使用强度的增加,由电机和旋翼构成的执行机构的故障率也在不断上升,由此导致无人机的飞行性能严重恶化甚至造成坠机等严重事故。因此,如何在执行机构故障的情况下保证无人机的飞行安全性就具有十分重要的现实意义。为解决这一问题,通常可采用故障诊断和控制律重构、补偿来提高无人机位置及姿态控制的容错性和可靠性。如文献[1-2]设计了一种线性二次调节器和模型预测控制器进行姿态容错控制,仿真表明在执行机构发生故障时其具有良好的容错能力;文献[3]采用线性二次型调节器对姿态和位置进行容错控制,获得了较好的效果,但只适用于系统在平衡点处的情况;文献[4]针对执行机构和传感器故障,提出了一种模糊滑模容错控制律方法,仿真表明该方法具有良好的跟踪性能;此外,硬件冗余[5-6]、反步法[7-8]等也可以实现旋翼无人机的容错控制。但上述研究多数均基于线性模型且只限于数字仿真验证,而缺乏实际的飞行实验验证。基于此,本文以某小型四旋翼无人机为对象,重点开展其执行机构故障状态(主要是指旋翼桨叶断裂)下的主动容错控制律设计、实现及其数字仿真和飞行验证等研究工作。
1 执行机构故障状态下四旋翼无人机的非线性建模四旋翼无人机执行机构发生故障(如某个轴上的桨叶断裂或电机失效)时,对应旋翼上的升力会急剧下降。由四旋翼无人机的飞行原理可知,在这种情况下,无人机失效旋翼上的升力会严重失衡,导致无人机的三轴姿态瞬间发生急剧变化,飞行特性以及数学模型会发生较大变化,从而给飞行安全带来极大影响。为了准确分析这种变化对无人机姿态和位置控制的影响以及设计容错控制律的需要,下面根据牛顿运动定律和欧拉运动方程分别建立无人机无故障正常飞行和执行机构故障时的非线性模型。
为了分析方便,建模时做如下假设:①四旋翼无人机的质心在机架的几何中心处,电机的升力面和重心位于同一个平面上,电机无安装误差角;②四旋翼无人机为刚体;③忽略空气阻力影响;④忽略螺旋桨的陀螺效应;⑤无人机在低速、小角度下飞行。
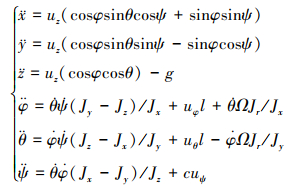
根据上述假设以及无人机的运动学和动力学分析,可以得到无故障正常飞行时的四旋翼无人机非线性数学模型为[9]:
|
(1) |
式中, x, y, z分别为无人机在地面坐标系下的3个位置分量; θ, φ, ψ分别为无人机的俯仰角、滚转角和偏航角; Jx, Jy, Jz分别为无人机绕机体各个轴的转动惯量; Jr为旋翼单个桨叶的转动惯量; g为重力加速度; c为旋翼驱动电机的反扭矩系数d与电机转速对应的升力系数b的比值; Ω为电机引起的扰动; l为电机中心到飞机质心的距离; uz, uφ, uθ, uψ分别为高度、滚转、俯仰、偏航四个控制通道的输入, 且uz=(F1+F2+F3+F4)/m, uφ=(F4-F2)/Jx, uθ=(F3-F1)/Jy, uψ=(F1-F2+F3-F4)/Jz, F1, F2, F3, F4分别为4个电机驱动螺旋桨产生的升力, m为无人机的质量。
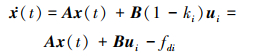
当无人机执行机构发生故障时, 可将由此引起的执行机构失效近似为一个常数, 并将其间接转换为高度、俯仰、滚转和偏航4个通道控制输入的损失。结合式(1), 此时的状态方程可改写为
|
(2) |
式中, i=z, φ, θ, ψ; x(t)为状态向量; A, B分别为系统矩阵和输入矩阵; ki为故障旋翼执行效率损失折合到控制输入通道的损失系数, 且0≤ki≤1(当ki=0时, 表明无效率损失; 当ki=1时, 表明全部损失; 当0<ki<1时表明有部分损失); fdi=Bkiui=Bufi(i=z, φ, θ, ψ), ufi表示执行机构桨叶半径损失间接引起的通道控制输入损失项, 值越大表明执行机构桨叶半径损失越严重。
结合(1)式和(2)式, 可得到执行机构故障时无人机的非线性方程为

|
(3) |
由(1)式和(3)式可以看出, 当执行机构发生故障时, 无人机模型会发生较大变化, 基于(1)式设计的控制律很难适应(3)式所示的故障系统。由于系统固有的非线性、故障类型和故障发生的不确定性以及故障程度等因素的影响, 此时的四旋翼无人机控制律尤其是容错控制律的设计存在诸多困难, 如故障观测、主被动容错控制结构的确定、容错控制算法的设计等。针对上述难点, 本节采用一种容错能力较强的主动容错控制方法, 其结构如图 1所示。其中, 故障观测器用于对无人机执行机构故障的实时观测, 控制器用于故障发生时飞行控制律的补偿和重构。不难看出, 故障观测器和控制器的补偿和重构是设计的关键。

|
| 图 1 带故障观测器的主动容错飞行控制结构 |
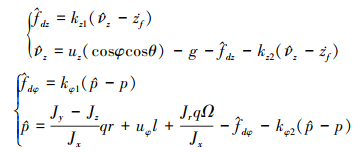
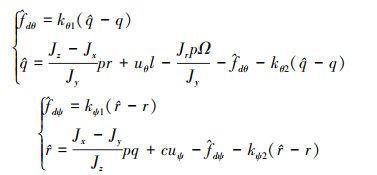
由(3)式可知, 执行机构故障的观测实际上是要实现对(3)式中fdz, fdφ, fdθ, fdψ项的估计。这里取fdz, fdφ, fdθ, fdψ的估计值如下式所示:
|
|
(4) |
式中, 








不难证明, 高度、滚转、俯仰和偏航通道的故障观测器是Lyapunov意义下稳定的, 说明该故障观测器可以实现对故障的有效观测。
2.2 控制律重构和补偿上一节中观测到故障后, 即可设计控制器对控制律进行重构和补偿。由于滑模控制具有非线性、鲁棒性和良好的控制效果等优点, 这里采用积分滑模控制理论对无人机高度、滚转、俯仰和偏航的控制律进行重构或补偿。其中位置和姿态控制回路的积分滑模切换函数均取如下形式

|
(5) |
式中, ei与
将(5)式代入(3)式, 微分后可得

|
(6) |
取高度趋近律为
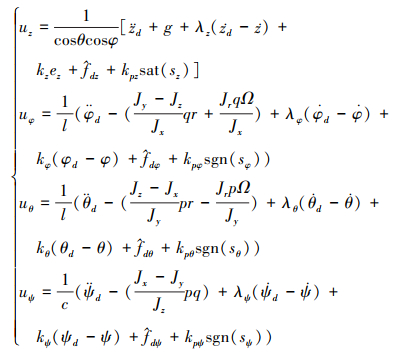
将趋近律代入(6)式并整理, 可得到执行机构故障下的积分滑模控制器为
|
(7) |
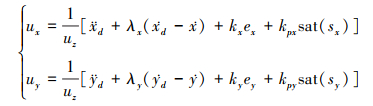
由于x, y位置受高度输入量uz控制, 所以此处无需进行补偿, 其趋近律如(5)式所示, 则x, y位置的滑模控制器分别为
|
(8) |
式中,λx, λy, kpx, kpy, kx, ky均为大于0的常数; xd, yd为x, y位置的指令输入。
由Lyapunov稳定性理论可以证明:①(7)式、(8)式的控制器是稳定的; ②由(4)式观测器、(7)式和(8)式控制器组成的闭环系统也是稳定的。
3 仿真分析与实验验证针对上节设计的无人机主动容错控制律, 本节将通过数字仿真和实际飞行试验来验证其有效性。
3.1 数字仿真首先根据第1节的方法建立某四旋翼无人机的非线性模型, 然后对所设计的主动容错控制律进行数字仿真。仿真中无人机位置和姿态主动容错控制律设计参数如表 1所示。
| 类别 | x通道 | y通道 | z通道 | φ通道 | θ通道 | ψ通道 |
| 容错控制参数 | λx=1.2 | λy=1.2 | λz=2.5 | λφ=6.5 | λθ=6.5 | λψ=6.5 |
| kx=1 | ky=1 | kz=10 | kφ=10 | kθ=10 | kψ=10 | |
| kpx=0.01 | kpy=0.01 | kpz=0.01 | kpφ=10 | kpθ=10 | kpψ=2 | |
| σx=0.01 | σy=0.01 | σz=0.001 | σφ=0.01 | σθ=0.01 | σψ=0.01 | |
| 观测器参数 | kz1=100 | kφ1=30 | kθ1=20 | kψ1=20 | ||
| kz2=150 | kφ2=50 | kθ2=50 | kψ2=50 |
仿真时假设无人机的飞行轨迹为:从初始航点A(空间位置为0 m, 0 m, 1 m)平飞14 s到达航点B(空间位置为2 m, 2 m, 1 m), 然后在第15 s时开始进行爬升, 到第24 s时爬升到航点C(空间位置为2 m, 1 m, 2 m)后悬停, 此阶段为正常无故障飞行仿真阶段。从第25 s到第50 s, 假设第4只桨叶因意外情况导致可用半径减小(即出现执行机构故障), 从而带来控制效率损失, 需要控制律重构和补偿保持无人机稳定飞行, 此阶段为执行机构故障情况下的飞行仿真阶段。
图 2和图 3分别为桨叶半径损失20%和损失30%情况下, 本文主动容错控制方法得到的四旋翼无人机的位置响应和姿态响应。

|
| 图 2 桨叶半径损失20%时无人机的位置和姿态响应 |

|
| 图 3 桨叶半径损失30%时无人机的位置和姿态响应 |
由图 2和图 3可以看出, 0~25 s无故障飞行阶段, 本文设计的主动容错控制律使无人机的姿态和位置响应稳定且具有很好的动、静态特性。尤为重要的是, 当桨叶半径在第25 s损失20%和30%时, 本文设计的主动容错律仍然能够保证无人机的姿态和位置响应稳定, 并保持较好的动、静态特性。
综上所述, 数字仿真结果表明, 本文基于滑模控制设计的主动容错飞行控制律具有较强的容错性、鲁棒性以及较好的动、静态特性, 可有效保障执行机构故障时无人机的飞行安全和飞行品质。
3.2 实际飞行验证在数字仿真的基础上, 本节以某小型四旋翼无人机的实际飞行实验进一步验证本文主动容错控制方法的有效性。
飞行实验时, 首先将文中主动容错控制算法注入ARM飞行控制器并初始化; 然后手遥操作无人机正常自主飞行(执行机构无故障)并通过地面站采集飞行数据。这一阶段结束后, 在地面上剪掉第4只桨叶半径的20%, 使其部分失效以模拟执行机构故障, 再次手遥操作无人机在故障情况下自主容错飞行并通过地面站采集数据。通过上述正常飞行和故障飞行这2个阶段的飞行数据的分析对比即可验证本文算法有效性。
图 4为无人机第4只桨叶实际损失20%半径时的姿态角飞行实验数据。可以看出, 当执行机构故障时, 无人机俯仰角、滚转角、偏航角能够快速跟踪指令输入, 尽管出现了一定幅度的震荡(俯仰角、滚转角振幅均为±1.5°, 偏航角振幅为±3°), 但都是稳定的, 从而保障了无人机执行机构故障状态下的飞行安全, 具有较强的容错能力。

|
| 图 4 第4只桨叶损失20%半径下的无人机实际飞行数据 |
本文根据运动学和动力学原理建立了执行机构故障状态下的四旋翼无人机非线性数学模型,应用积分滑模理论进行了主动容错飞行控制律的设计,通过观测由执行机构故障造成的控制输入损失量,进而对控制输入进行补偿,使系统具有更好的容错能力。无论是通过数字仿真验证,还是实际四旋翼无人机多种执行机构故障状态下的飞行试验,两者结果均表明带故障观测器的主动容错控制具有较强的容错性。
| [1] | Yu B, Zhang Y, Minchala I, et al. Fault-Tolerant Control with Linear Quadratic and Model Predictive Control Techniques against Actuator Faults in a Quadrotor UAV[C]//Control and Fault-Tolerant Systems, 2013: 661-666 http://www.researchgate.net/publication/261460864_fault-tolerant_control_with_linear_quadratic_and_model_predictive_control_techniques_against_actuator_faults_in_a_quadrotor_uav |
| [2] | Yu B, Zhang Y, Qu Y. MPC-Based FTC with FDD Against Actuator Faults of UAVs[C]//International Conference on Control, Automation and Systems. IEEE, 2015: 225-230 http://www.researchgate.net/publication/304605144_MPC-based_FTC_with_FDD_against_actuator_faults_of_UAVs |
| [3] | Sadeghzadeh I, Mehta A, Zhang Y, et al. Fault-Tolerant Trajectory Tracking Control of a Quadrotor Helicopter Using Gain-Scheduled PID and Model Reference Adaptive Control[J]. Journal of Unmanned System Technology, 2016, 3(3): 108-118. DOI:10.21535/just |
| [4] | Zeghlache S, Kara K, Saigaa D. Fault Tolerant Control Based on Interval Type-2 Fuzzy Sliding Mode Controller for Coaxial Trirotor Aircraft[J]. ISA Transactions, 2015, 59: 215-231. DOI:10.1016/j.isatra.2015.09.006 |
| [5] | Alwi H, Edwards C. Sliding Mode Fault-tolerant Control of an Octorotor Using Linear Parameter Varying-based Schemes[J]. Control Theory & Applications, 2015, 9(4): 618-636. |
| [6] |
曾勇. 四旋翼飞行器容错控制系统设计与实现[D]. 成都: 电子科技大学, 2013 Zeng Yong. Design and Implementation of Fault-Tolerant Control System for Four-Rotorcraft[D]. Chengdu, University of Electronic Science and Technology, 2013(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10614-1013328967.htm |
| [7] | Chen F, Lei W, Zhang K, et al. A Novel Nonlinear Resilient Control for a Quadrotor UAV via Backstepping Control and Nonlinear Disturbance Observer[J]. Nonlinear Dynamics, 2016, 85(2): 1281-1295. DOI:10.1007/s11071-016-2760-y |
| [8] | Zhang X, Zhang Y, Su C Y, et al. Fault-Tolerant Control for Quadrotor UAV Via Backstepping Approach[C]//AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, 2010 http://www.mendeley.com/research/fault-tolerant-control-quadrotor-via-backstepping-approach/ |
| [9] | Li T, Zhang Y M, Gordon B W. Passive and Active Nonlinear Fault-Tolerant Control of a Quadrotor UAV Based on Sliding Mode Control Technique[J]. Proceedings of the Institution of Mechanical Engineers Part Ⅰ Journal of Systems & Control Engineering, 2012, 227(1): 12-23. |
