

2. 陕西省试验飞机设计与试验技术工程实验室, 陕西 西安 710072
变体飞机能够主动改变气动外形以适应不同的飞行环境或飞行任务。经过研究,变后掠飞机的非对称变形有利于提高飞机的抗扰动能力(比如抗侧风能力),能够更有效地完成任务规划。相比之下,折叠机翼变体飞机的变形量更大,更加有利于提高飞机的机动性和敏捷性,提高飞机的综合性能。因此有必要专门针对非对称变形引起的气动力和动力学响应特性进行研究。详细的气动模型在飞行仿真和控制系统设计中占据着非常重要的作用,变体飞机变形过程中气动特性更加复杂,因此,如何建立精准的气动力数学模型至关重要。变形过程中气动参数呈现强烈的非线性[1-5],尤其是在非对称变形时,又会至少增加一个变形参数,气动参数的变化规律显得更为复杂和难以描述,气动数据模型复杂、高阶且含有强非线性。目前针对变体飞机的研究文献中在进行气动力建模时多以数据插值的方法求解连续变形状态的气动力[6-8]。该方法不能得知变形参数与气动系数之间的具体函数关系,计算精度也难以保证,无法得到变形过程的高精度气动模型。
常用的气动力数学模型有线性气动模型和多项式模型。其中多项式模型是线性模型的直接推广,在一定范围内能够较好地描述非线性效应,但其近似能力很大程度受限于阶次选取。于是学者们又发明了多项式样条函数,可以用低阶项很好地逼近各种非线性,通过增加节点数增加多项式段数,从而提高近似能力[9]。文献[10]采用多项式样条函数研究轻型飞机在失速、过失速区的气动力数学模型。多项式样条函数模型与多项式模型一样需要预设模型阶次,选择不合适仍然会有较大误差,且无法拟合散乱数据[9]。近年来,学者们研究了一种由伯恩斯坦多项式组成的多元样条函数[11-13],并将该方法用于参数辨识[14-15]。研究表明,该方法用于飞行器气动辨识能够得到高精度的气动力模型[16-18]。
本文提出了一种采用多元样条函数理论进行变体飞机气动力建模的方法。该方法无需预判具体模型结构,通过数据拟合直接得到了变形参数和气动系数之间的具体函数关系,能够得到详细描述变体飞机任意对称和非对称变形状态下的气动力模型。
1 多元样条函数基础理论 1.1 质心坐标系单形是组成多元样条函数的基本单元。例如, 二元单形是一个三角形,三元单形一个是四面体。n元单形t由(n+1)个顶点连接组成, 描述如下:

|
(1) |
与单形固连的局部坐标系称为质心坐标系。质心坐标系上的每一个点x=(x1, x2, …, xn)都可以由单形t的顶点按权重线性相加得到, 描述如下:

|
(2) |
n元单形t中任何一点的质心坐标b(x)=(b0, b1, …, bn)可由下式计算得到:
|
(3) |
|
(4) |
三角测量Γ是将一个区域划分为J个非交叉相连的单形, 描述如下:

|
(5) |
式中, 边缘单形
给定一个区域通过三角测量得到J个单形, 每一个单形tj均可由维度为d的多项式ptj(x)描述, 按照预设连续条件组合成多元样条函数s(x):

|
(6) |
样条空间是指在三角测量Γ区域内, 给定维度d和连续阶数Cr的所有样条函数s的集合。

|
(7) |
式中, Ρd指所有维度为d的多项式集合。
1.3 B-form质心坐标b(x)=(b0, b1, …, bn)写成维度为d的伯恩斯坦多项式形式如下:

|
(8) |
多元系数κ定义如下:

|
(9) |
κ的1-范数为:

|
(10) |
κ的阶乘定义如下:

|
(11) |
κ的所有组合按照词典排序法排序, 排列顺序如下:

|
(12) |
κ的所有组合数量
|
(13) |
给定三角测量Γ, 任何多项式均可写成如下形式:

|
(14) |
(14)式即为多元样条函数的B-form形式, cκtj为B-系数。
B-系数可以描述为以下矢量形式:

|
(15) |
基本多项式按照κ的组合排列可描述为矢量形式:

|
(16) |
根据(15)和(16)式, (14)式的矢量形式可以描述如下:

|
(17) |
B-系数的全局矢量c描述如下:

|
(18) |
基本多项式的全局矢量描述如下:

|
(19) |
根据(6)和(17)式,1组观测值(x(i), y(i))可以用B-form多项式来描述如下:

|
(20) |
根据(18)和(19)式,(20)式的矢量形式可以描述如下:

|
(21) |
综上, 对于所有观测值, 样条函数的线性回归模型描述如下:

|
(22) |
通过三角测量在给定区域得到J个单形, 各单形之间相邻边缘之间的连续性通过连续条件来约束。给定连续阶数为Cr时, 每个相邻边缘的连续条件个数R按下式计算得到:

|
(23) |
定义H为平滑矩阵, 可以得到全局区域内的连续条件方程:

|
(24) |
式中, J为单形个数, E为单形的相邻边缘个数,
以某型折叠机翼变体飞机为例, 折叠段可以单独向上折叠120°, 同时外段机翼始终保持水平, 外形如图 1所示, 各翼段的主要几何参数如表 1所示。

|
| 图 1 折叠机翼变体飞机模型平面图 |
| 几何参数 | 机身段 | 折叠段 | 外段 |
| 翼段展长/m | 0.30 | 0.30 | 0.55 |
| 参考面积/m2 | 0.218 | 0.131 | 0.165 |
| 根弦长/m | 0.900 | 0.725 | 0.468 |
| 梢弦长/m | 0.725 | 0.468 | 0.217 |
| 前缘后掠角/(°) | 35 | 35 | 35 |
研究结果表明, 在变形速率不大时, 变体飞机的气动力可忽略非定常效应, 按准定常计算[8, 20]。变体飞机的气动力仅受飞机当前的气动外形和飞行状态影响。稳定轴系绕自身横轴转动α(迎角)角度与体轴系重合, 稳定轴系上气动力和力矩系数分别是:升力系数CL, 阻力系数CD, 侧力系数CY, 滚转力矩系数Cl, 俯仰力矩系数Cm, 偏航力矩系数Cn。体轴系上的气动力和力矩计算公式如下:
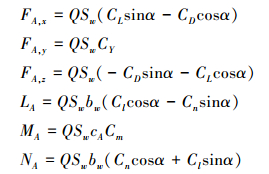
|
(25) |
式中, 
在非对称变形过程中或变形完成后非对称飞行时, 还会产生附加侧力Fu, y、滚转力矩Lu和偏航力矩Nu, 它们是变形参数μ=[μ1 μ2]T的函数[21]。本文引入3个非对称变形引起的气动参数:附加侧力系数CYur、滚转力矩系数Clur和偏航力矩系数Cnur, 定义如下:
|
(26) |
变体飞机变形过程的气动系数线性化模型如下:

|
(27) |
式中, β为侧滑角; 

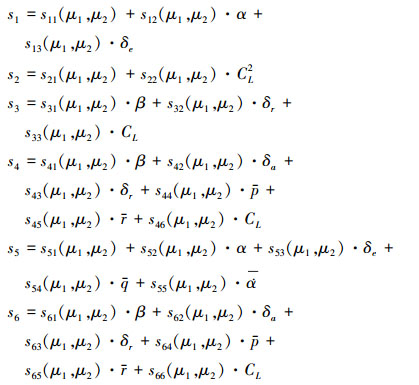
当变体飞机在变形过程中保持小迎角和小侧滑角状态时, 仍可用形如(27)式的线性气动模型表达当前状态的气动模型。其中的每一个气动参数都是变形参数的非线性函数, 参数模型结构未知。本文所示变体飞机的变形参数μ=[μ1 μ2]T有2个变量, 因此为二元样条函数模型。在建模过程中, 将每一个气动参数都视为一个样条函数模型进行建模, 于是可得变体飞机气动系数样条函数模型最终表达形式如下:
|
(28) |
式中, si分别对应CL,CD,CY,Cl,Cm和Cn; sij(μ1, μ2)∈Srijdij (Γij)为需要估计的样条函数模型, 分别对应(27)式中的各个气动参数。
根据(21)式, 变体飞机气动系数模型可以描述为线性回归的形式。例如, CL描述如下:

|
(29) |
式中, cij为样条函数sij的B-系数。由此, (28)式能够表达出任意变形状态的气动力系数模型。
3 样条函数模型估计 3.1 样条函数模型估计流程样条函数模型估计流程如图 2所示, 主要分为4大步骤:模型结构选取、模型估计、模型验证和模型确定。其中模型结构选取直接影响模型的性能, 最为复杂和重要, 一般需要多次选取不同的维度对结果进行比较。三角测量的构造受限于数据分布情况、数据量和计算能力, 需要权衡选取。

|
| 图 2 样条函数模型估计流程图 |
1) 维度选择
一般来讲, 提高维度会增加模型的精度, 但同时也会使模型变得更加复杂, 计算更加耗时, 因此需要选择合适的维度。文献[11]研究表明, d≥3r+2时, 样条函数总是能够得到较好的精度。本文考虑数据0阶连续, 即r=0, 因此初次选取维度为d=2。
2) 构造三角测量;
三角测量的构造直接影响模型的精度和阶次。理论上讲, 在数据分布点足够多的情况下, 三角测量越细密, 越容易得到高精度低阶次的模型。但一方面受限于数据源的密度, 另一方面受限于计算能力和计算速度的要求, 需要综合考虑三角测量构造。文献[13, 19]详细研究了三角测量的划分规则。以s∈S20 (Γ4)为例, 三角测量和B-form排列分别如图 3和图 4所示。

|
| 图 3 三角测量(Γ4) |

|
| 图 4 B-form排列(s∈S20(Γ4)) |
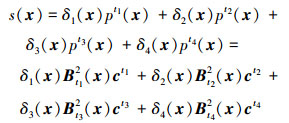
3) 确定模型空间结构
由(6)式和(17)式可得图 4所示B-form排列的样条函数模型结构为:
|
(30) |
由(12)式可得κ的排列为:

|
(31) |
由(15)式可得B-系数ctj为:

|
(32) |
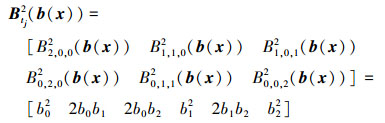
由(16)式可得每一个三角的基本多项式矢量描述如下:
|
(33) |
由(18)式可得B-系数的全局矢量c为:

|
(34) |
由(19)式可得基本多项式的全局矢量为:

|
(35) |
1) 计算B-form矩阵
由图 3可知各顶点坐标:v0=(0, 0), v1=



由(21)式可得每个单形的线性回归模型为:
|
(36) |
式中, Nj为每个单形的数据组数。上式写成标准形式如下:

|
(37) |
于是得到样条函数空间内所有数据的线性回归模型如下:
|
(38) |
至此, 得到了形如(22)式的线性回归模型, 于是得到B-form矩阵X。
2) 计算平滑矩阵
容易得到s∈S20 (Γ4)的连续条件方程如下:
|
(39) |
于是可得平滑矩阵:
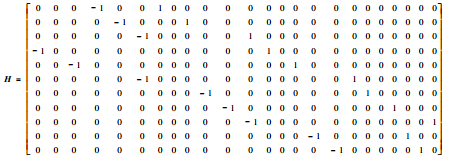
|
3) B-系数估计
根据(22)式的线性回归模型, 可以用最小二乘估计方法估计B-系数:

|
(40) |
给定约束条件Hc=0, 可以得到最小二乘估计表达式:

|
(41) |
可由下式计算出B-系数:
|
(42) |
例如, 代入数据可得, Cmδe(μ1, μ2)∈S20 (Γ4)的B-系数估计结果如下:
|
1) 误差分析理论
χval为需要验证的数据集合, 表示为
|
(43) |
实际输出与估计值之差, 即残差ε(χval)为

|
(44) |
残差均方根RMSε为

|
(45) |
相对残差均方根RMSrelε为

|
(46) |
最大相对残差εrelmax为

|
(47) |
2) 计算结果分析
以Cmδe(μ1, μ2)为例, 计算得出残差各相关值见表 2。
| d | RMSε | RMSrelε | εrelmax |
| 2 | 0.008 | 0.022 | 0.064 |
| 3 | 0.006 | 0.017 | 0.047 |
| 4 | 0.005 | 0.014 | 0.036 |
| 5 | 0.012 | 0.033 | 0.153 |
由表 2可知, d=2时, 残差均方根RMSrelε已经满足需求, 并且当维度增加时, 样条函数模型性能并没有得到大幅的提升, 因此选定维度d=2, 最终确定样条函数模型为Cmδe(μ1, μ2)∈S20 (Γ4); 同时可以看出d=5时, 残差各项指标均增大, 即样条函数模型性能下降, 因此单纯增加维度可能会降低模型品质。
4.2 确定最终模型模型最终确定依据以下3条基本准则:
1) 0.01<RMSrelε<0.05时, 模型品质视为合适;
2) RMSrelε<0.01时, 模型品质视为优异, 不再提高维度;
3) 仅当提高维度有显著的品质提升时才选择更高的维度。
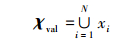
所有气动参数的最终估计结果如下:
|
确定的模型误差分析结果如表 3所示。
| 参数 | RMSrelε |
| CL0 | 0.044 24 |
| CD0 | 0.008 35 |
| CYβ | 0.017 32 |
| Clβ | 0.006 73 |
| Clδr | 0.044 33 |
| Clr | 0.010 27 |
| Cm0 | 0.010 84 |
| Cmδe | 0.022 20 |
|
0.011 62 |
| Cnδa | 0.003 32 |
| Cnr | 0.003 61 |
| CLα | 0.010 50 |
| Cdi | 0.006 98 |
| CYur | 0.006 58 |
| Clδa | 0.008 77 |
| Clp | 0.000 89 |
| Clur | 0.007 06 |
| Cmα | 0.044 60 |
| Cmq | 0.011 63 |
| Cnβ | 0.033 10 |
| Cnp | 0.008 30 |
| Cnur | 0.006 58 |
Cmδe拟合数据图示如下:

|
| 图 5 拟合数据(Cmδe(μ1, μ2)∈S20 (Γ4))与原始数据对比 |
前面得到的模型是在质心坐标系中描述, 质心坐标系为局部坐标系, 因此需要转换到描述飞机受力情况和运动特性的总体坐标系中。将质心坐标b(x)=(b0, b1, b2)和B-系数的估计值代入(17)式可得总体坐标系中的多项式描述形式:
例如, Cmδe(μ1, μ2)∈S20 (Γ4)多项式描述如下:

|
(48) |
对应各参数值见表 4。
| tj | aj0 | aj1 | aj2 | aj3 | aj4 | aj5 |
| t1 | -0.787 49 | -0.012 35 | -0.009 15 | 0.001 85 | 0.047 84 | 0.043 45 |
| t2 | -0.808 16 | 0.016 18 | -0.010 19 | -0.001 85 | 0.038 39 | 0.048 66 |
| t3 | -0.787 49 | -0.009 15 | -0.012 35 | 0.001 85 | 0.043 45 | 0.047 84 |
| t4 | -0.808 16 | -0.010 19 | 0.016 18 | -0.001 85 | 0.048 66 | 0.038 93 |
本文采用多元样条函数理论对变体飞机气动力进行建模,以某型折叠机翼变体飞机为例,建立了基于多元样条函数模型结构的气动力方程,给出了详细的样条函数模型结构和估计流程,通过计算得到了该变体飞机的气动力数学模型。通过误差分析发现,当维度增加时,模型品质未必一直增加,维度选取过高可能会造成拟合失真,因此不能单纯的通过提高维度来提高模型品质,当提高维度得到的模型无法满足要求时需要考虑重新构造三角测量。结果表明,该方法无需预知变形过程的气动变化规律和气动模型具体结构,通过误差分析选择合理维度,能够得到详细描述变体飞机任意对称和非对称变形状态的气动力模型,解决了变体飞机气动模型结构未知情况下的气动力建模问题以及在非对称状态下的气动力描述问题。
| [1] | Abdulrahim M, Lind R. Control and Simulation of a Multi-Role Morphing Micro Air Vehicle[R]. AIAA-2005-6481 http://www.researchgate.net/publication/264274372_Assessment_of_Operational_Compatibility_for_Future_Advanced_Vehicle_Concepts |
| [2] | Bourdin P, Gatto A, Friswell M I. The Application of Variable Cant Angle Winglets for Morphing Aircraft Control[R]. AIAA-2006-3660 http://arc.aiaa.org/doi/abs/10.2514/6.2006-3660 |
| [3] | Grant D T, Abdulrahimy M, Lind R. Flight Dynamics of a Morphing Aircraft Utilizing Independent Multiple-Joint Wing Sweep[R]. AIAA-2006-6505 http://www.researchgate.net/publication/268555144_Flight_Dynamics_of_a_Morphing_Aircraft_Utilizing_Independent_Multiple-Joint_Wing_Sweep |
| [4] | Grant D T, Chakravarthy A, Lind R. Modal Interpretation of Time-Varying Eigenvectors of Morphing Aircraft[R]. AIAA-2009-5848 http://www.researchgate.net/publication/269254989_Modal_Interpretation_of_Time-Varying_Eigenvectors_of_Morphing_Aircraft |
| [5] | Grant D T. Modeling and Dynamic Analysis of a Multi-Joint Morphing Aircraft[D]. Florida, University of Florida, 2009 https://www.researchgate.net/publication/268397434_MODELING_AND_DYNAMIC_ANALYSIS_OF_A_MULTI-JOINT_MORPHING_AIRCRAFT_By |
| [6] | Seigler T M. Dynamics and Control of Morphing Aircraft[D]. Virginia, Virginia Polytechnic Institute and State University, 2005 http://www.researchgate.net/publication/259666351_Dynamics_and_control_of_morphing_aircraft |
| [7] | Seigler T M, Neal D A. Analysis of Transition Stability for Morphing Aircraft[J]. Journal of Guidance Control and Dynamics, 2009, 32(6): 1947-1953. DOI:10.2514/1.44108 |
| [8] | Yue T, Wang L, Ai J. Longitudinal Linear Parameter Varying Modeling and Simulation of Morphing Aircraft[J]. Journal of Aircraft, 2013, 50(6): 1673-1681. DOI:10.2514/1.C031316 |
| [9] | De Visser C C, Van Kampen E, Chu Q P, et al. A New Framework for Aerodynamic Model Identification with Multivariate Splines[R]. AIAA-2013-4748 http://www.researchgate.net/publication/260104982_A_New_Framework_for_Aerodynamic_Model_Identification_with_Multivariate_Splines |
| [10] | Batterson J G. Analysis of Oscillatory Motion of a Light Airplane at High Value of Lift Coefficient[R]. NASA TM-84563, 1983 https://ntrs.nasa.gov/search.jsp?R=19830009279 |
| [11] | Awanou G, Lai M, Wenston P. The Multivariate Spline Method for Scattered Data Fitting and Numerical Solutions of Partial Differential Equations[A]. Wavelets and Splines, Brentwoxl Nashboro, 2005: 24-75 http://www.researchgate.net/publication/267439360_The_multivariate_spline_mehtod_for_scattered_data_fitting_and_numerical_solution_of_partial_differential_equations |
| [12] | Lai M J. Multivariate Splines for Data Fitting and Approximation[C]//12th Approximation Theory Conference, 2007 |
| [13] | Lai M J, Schumaker L L. Spline Function on Triangulations[M]. New York: Cambridge University Press, 2007: 18-23. |
| [14] | De Visser C C, Chu Q P, Mulder J A. A New Approach to Linear Regression with Multivariate Splines[J]. Automatica, 2009, 45(12): 2903-2909. DOI:10.1016/j.automatica.2009.09.017 |
| [15] | De Visser C C, Chu Q P, Mulder J A. Differential Constraints for Bounded Recursive Identification with Multivariate Splines[J]. Automatica, 2011, 47(9): 2059-2066. DOI:10.1016/j.automatica.2011.06.011 |
| [16] | De Visser C C, Mulder J A, Chu Q P. Validating the Multidimensional Spline Based Global Aerodynamic Model for the Cessna CitationⅡ[R]. AIAA-2011-6356 http://arc.aiaa.org/doi/abs/10.2514/6.2011-6356 |
| [17] | Sun L G, De Visser C C, Chu Q P, et al. Online Aerodynamic Model Identification Using a Recursive Sequential Method for Multivariate Splines[J]. Journal of Guidance Control and Dynamics, 2013, 36(5): 1278-1288. DOI:10.2514/1.60375 |
| [18] | Tol H J, De Visser C C, Van Kampen E, et al. Nonlinear Multivariate Spline-Based Control Allocation for High-Performance Aircraft[J]. Journal of Guidance Control and Dynamics, 2014, 37(6): 1840-1862. DOI:10.2514/1.G000065 |
| [19] | De Visser C C. Global Nonlinear Model Identification with Multivariate Splines[D]. Zuthpen, Delft University of Technology, 2011 https://www.researchgate.net/publication/229058344_Global_Nonlinear_Model_Identification_with_Multivariate_Splines |
| [20] | An J, Yan M, Zhou W, et al. Aircraft Dynamic Response to Variable Wing Sweep Geometry[J]. Journal of Aircraft, 1988, 25(3): 216-221. DOI:10.2514/3.45580 |
| [21] | Xu X W, Zhang W. Research on Methods of Dynamic Modeling and Simulation for Morphing Wing Aircraft[R]. ICAS 2012-698 https://www.researchgate.net/publication/290594489_Research_on_methods_of_dynamic_modeling_and_simulation_for_morphing_wing_aircraft |
2. Experimental Aircraft Design and Flight Testing Lab of Shaanxi, Xi'an 710072, China
