

2. 西安爱生技术集团公司 飞机研究室, 陕西 西安 710065
双尾撑布局由于其布局结构稳定、可靠性高以及后置发动机驱动的螺旋桨不会遮挡任务设备等特点而广泛应用于中小型战术无人机的总体气动布局。其中,国外的影子200[1]、米拉奇26[2]和先锋[3]等无人机以及国内的大部分中小型无人机都为双尾撑布局无人机。中小型战术型无人机平台由于其从事任务的复杂性和作战环境的多样性,此类无人机普遍要求具备野战场地回收能力。
伞降回收具有可靠性高、回收场地适应性强等特点,已经成为中小型战术无人机的主流回收方式。由于双尾撑布局无人机其伞舱位于螺旋桨和平尾之前,在降落伞开伞过程中,引导伞包必须依次越过螺旋桨和飞机平尾才能保证降落伞顺利打开。否则会造成伞绳绕桨或降落伞从平尾下部穿过等严重回收事故。目前,针对中小型战术无人机的伞降回收研究主要集中在伞降回收落点分析[4]、弹射开伞回收技术[5]和群伞回收伞降技术[6]等方面。针对双尾撑无人机气动力抛伞开伞过程的研究较少。
本文针对双尾撑布局气动力开伞无人机,采用动力学分析方法建立其开伞动力学仿真模型,得到了开伞速度、伞舱盖质量和伞包顶力对伞舱盖开启运动影响关系。计算得到伞舱盖分离角度、开伞速度和主伞包初始顶力对引导伞包运动轨迹的影响关系。并针对所建立的开伞动力学分析模型,采用地面风洞开伞试验的方式进行了试验验证。
1 双尾撑无人机开伞过程 1.1 双尾撑无人机开伞机构组成双尾撑无人机多采用大展弦比布局,此种布局形式在回收时对飞机姿态和过载限制要求较高。上开伞方式开伞,降落伞从飞机背部拉出,飞机姿态和减速过程较为缓和,如图 1所示。

|
| 图 1 上开伞无人机 |
双尾撑上开伞形式无人机开伞机构由切割器座、切割器和锁定用锦丝绳三部分组成。伞舱盖锁定流程为:首先将切割器安装至切割器座上,然后将锦丝绳穿过切割器,并将伞舱盖和机身捆扎起来,如图 2所示。

|
| 图 2 开伞机构组成及锁定方式 |
上开伞无人机回收伞舱位于螺旋桨、平尾和垂尾之前。无人机回收程序启动开伞指令发出,切割器通电起爆并切断伞舱盖与机身连接的锦丝绳,实现伞舱盖与机身分离。伞舱盖与机身分离后,在主伞包顶力和气动力的作用下加速开启并抛出引导伞包,引导伞包在抛离速度和气动力的作用下,越过尾部螺旋桨和平尾,拉出主伞包,实现成功开伞,如图 3所示。

|
| 图 3 双尾撑无人机开伞流程 |
气动力可分解为气动升力和气动阻力:

|
(1) |
式中, CD为气动阻力系数; CL为气动升力系数; ρ为空气密度, kg/m3; V为来流速度, m/s; A为伞舱盖面积, m2。
由文献[7]可知, 对于雷诺数在104~106的不可压缩流体, 伞舱盖的绕流总压力的升力分量系数和阻力分量系数可以表示为:

|
(2) |
式中,α(θ)为伞舱盖的迎角函数, 可表示为α=αP+θ, 单位rad; αP为舱盖锁定状态伞舱盖末端点P与转动中心O连线的水平夹角,单位rad。
2.2 开伞过程伞舱盖开启力矩切割器切断机身与伞舱盖之间的捆扎锦丝绳, 伞舱盖与机身分离。伞舱盖在主伞顶力Fs、气动力Fq以及自身重力Gs的作用下转动打开。

|
| 图 4 伞舱盖开启过程受力 |
伞舱盖受力分为3个阶段:伞舱盖开启初始阶段、气动力开启阶段和气动力、重力开盖阶段。
取坐标系Z轴为开启力矩正向, 则有伞舱盖各开伞阶段的开启力矩
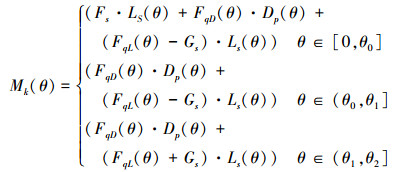
|
(3) |
其中伞舱盖重心距离转动中心的X向和Y向距离Ls和Dq可表示为:

|
(4) |

|
(5) |
式中, RG为伞舱盖重心与转动中心距离, m; αG为伞舱盖重心与转动中心连线的水平夹角, rad; Dq为伞舱盖重心距离距转动中心的Y向距离, m。
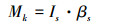
2.3 开伞过程伞舱盖角速度为了保证开伞通道快捷畅通, 防止伞绳和伞包拖挂伞舱盖, 伞舱盖外形一般为小曲率单向拉伸等厚层压板。假定伞舱盖在开伞过程中不发生变形, 根据刚体定轴转动定律[8], 伞舱盖开启力矩:
|
(6) |
式中, Is为伞舱盖转动惯量。
在不考虑转动摩擦的条件下, 伞舱盖转动动能可以写为

|
(7) |
则有伞舱盖转动角速度为:
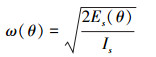
|
(8) |
引导伞包与主伞包都为近似圆柱体, 在固定翼伞降无人机正常开伞速度下, 圆柱体阻力系数约为1~1.2[9]。则引导伞包的绕流阻力Fds可由(1)式计算得到。
引导伞包在开伞初始阶段与伞舱盖捆扎在一起。当伞舱盖运动至某一预设角度θd时, 引导伞包与伞舱盖解锁绳打开, 引导伞包与伞舱盖分离。此时, 伞舱盖角速度为ω(θd), 对应的引导伞包分离速度为Vds, 如图 5所示。

|
| 图 5 引导伞包解锁受力示意图 |
当伞舱盖转动θd角度时, 引导伞包与伞舱盖分离, 由(8)式可得伞舱盖此时的角速度ωd为:
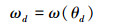
|
(9) |
根据刚体动力学理论, 引导伞包与伞舱盖分离时对应的线速度Vds为:

|
(10) |
根据几何关系可知, 引导伞包分离速度Vds的方向与飞机水平面的夹角σds为
|
(11) |
引导伞包分离速度Vds可分解为沿X向的速度VdsX和Y向速度VdsY:
|
(12) |
引导伞包与伞舱盖分离后, 受到航向气动力Fds和自身重力Gds作用。则引导伞包的轨迹Pds可以写成:

|
(13) |
式中,t为时间, 单位s。
3.2 引导伞包安全开伞判定条件为了保证开伞成功, 引导伞包运动轨迹必须高于尾部螺旋桨上部点Ppu和平尾末端点Phe。则引导伞包越过螺旋桨上部端点的判定条件为:
|
(14) |
引导伞包越过平尾尾端点的判定条件为:
|
(15) |
引入引导伞成功越过螺旋桨判定因子κp和引导伞成功越过平尾末端点判定因子κh, 则有:

|
(16) |

|
(17) |
开伞速度对于伞舱盖开启过程气动力和引导伞包运动轨迹都有着直接影响。在计算其对于伞舱盖开启力矩和引导伞包运动轨迹影响时, 结构几何尺寸的选取根据某型双尾撑布局无人机的大致尺寸选取, 计算参数具体取值见表 1。
| 参数 | 值 |
| Fs/N | 98 |
| W/mm | 375 |
| RG/mm | 288 |
| αG/(°) | 2.5 |
| Ppu/mm | (619, 280) |
| Ts/mm | 3 |
| αP/(°) | 5.4 |
| R/mm | 592 |
| ms/kg | 0.975 |
| θ2/(°) | 150 |
| Phe/mm | (1 500, 220) |
将表 1初始参数带入(3)式, 分别计算开伞速度为25 m/s、28 m/s、30 m/s和33.3 m/s时, 伞舱盖开启过程各个转角对应的开启力矩。
由图 6可以看出, 伞舱盖开启力矩Mk在开盖初始阶段, 由于主伞包顶力的存在, 开启力矩较大。进入气动力开盖阶段后, 主伞包顶力消失, 伞舱盖开启力矩突然降低, 并随着伞舱盖开启而增加, 伞舱盖迎角达到π/2时, 气动力最大, 伞舱盖开启扭矩达到最大值。进入开盖末段, 此阶段伞舱盖开启力矩为伞舱盖重力和气动力联合作用的力矩, 伞舱盖迎角和气动力减小, 伞舱盖开启力矩也不断降低。当开伞速度增加时, 伞舱盖开启力矩增加较为明显。

|
| 图 6 伞舱盖开启力矩与转角关系图 |
取表 1为初始计算参数, 由(8)式计算得到各开伞速度下伞舱盖各转角位置的角速度。
由图 7可以看出, 伞舱盖角速度ω随着伞舱盖转角的增大而变大。开伞初始阶段和气动力开伞阶段, 伞舱盖转角增加, 伞舱盖迎风面积增加, 气动开伞力和伞舱盖角速度加速明显。末段开伞阶段, 伞舱盖转角增加但是伞舱盖的迎风面积减小, 造成伞舱盖开伞气动力减小, 伞舱盖角速度的增加较为平缓。

|
| 图 7 伞舱盖转角与伞舱盖角速度关系图 |
引导伞包在伞舱盖的分离角度对于引导伞包开伞过程中的运动轨迹有重要影响。分别针对开伞速度为25 m/s、28 m/s、30 m/s和33.3 m/s计算各个分离角度下引导伞包的运动轨迹, 初始计算参数取表 1中的参数, 计算结果如图 8所示。

|
| 图 8 分离角度对于引导伞包运动轨迹影响分析 |
由图 8可以看出, 引导伞包分离角度为π/36时, 引导伞包运动轨迹最为扁平。引导伞包的运动轨迹都是随着引导伞包分离角度的增加而不断趋于饱满。引导伞包分离角度增加至10π/36时, 引导伞包运动轨迹在Y向的值达到最大值, 随后随着引导伞包分离角度的增加, 引导伞包运动轨迹Y向值开始减小。
由(16)式和(17)式计算得到螺旋桨判定因子κp和平尾末点判定因子κh与引导伞包分离角度关系, 如图 9所示。

|
| 图 9 引导伞包分离角度与判定因子κp和κh关系图 |
由图 9可以看出, 螺旋桨判定因子和平尾判定因子随着开伞速度的增加而增大。当开伞速度不变时, κp和κh随着引导伞包分离角度的增加而增大, 随后缓慢降低。开伞速度在25 m/s和33.3 m/s区间时, κp和κh的最大值点位于引导伞包分离角度θd∈[0.706, 0.759]区间内, θd对应的角度值为40.5°~43.5°。此时, 引导伞包运动轨迹距离桨尖和平尾末端点最大, 引导伞包与螺旋桨和平尾发生碰撞的可能性最小, 开伞成功率越高。
4.3 主伞包顶力影响分析分析主伞包对于伞舱盖的初始顶力影响时, 结合实际使用情况分别取Fs为49 N、98 N和147 N来计算, 其他参数取表 1参数。
将上述参数带入(8)式中, 得到不同主伞包顶力下伞舱盖的角速度, 如图 10所示。

|
| 图 10 主伞包顶力对伞舱盖转动角速度影响分析 |
当主伞包顶力增加时, 伞舱盖各个转角对应的转动角速度增加。主伞包顶力对初始阶段的伞舱盖转动角速度的增量影响较大。随着伞舱盖转角的增加, 当进入气动力开启阶段和气动力、重力开启阶段后, 主伞包顶力对于伞舱盖角速度的增量影响较小。
将本节计算参数带入(13)式中, 引导伞包分离角度取42°, 计算得到主伞包顶力对于引导伞包轨迹影响关系, 如图 11所示。

|
| 图 11 主伞包顶力对于引导伞包轨迹影响 |
由图 11可以看出, 当开伞速度和引导伞包分离角度不变的条件下, 主伞包顶力增加, 引导伞包开伞运动轨迹Y向高度增加, 越过螺旋桨和平尾末端点的判定因子κp和κh也在随着主伞包顶力的增加而变大。但是, 在相同的开伞速度下, 主伞包顶力的增加对于引导伞包轨迹Y向增量和κp、κh的影响不大, 增加趋势较为平缓。
5 双尾撑布局无人机开伞过程试验研究针对以上分析参数,在风洞中进行无人机地面开伞试验,试验机身和伞舱尺寸参数与计算初始参数一致。分别在25 m/s和33.3 m/s的开伞速度下进行试验,引导伞包分离角度根据第4.2节计算区间,选取为42°。试验采用125fps高速摄影设备记录开伞过程,试验过程照片如图 12、图 13所示。

|
| 图 12 开伞速度25 m/s时引导伞运动轨迹 |

|
| 图 13 开伞速度33.3 m/s时引导伞运动轨迹 |
以试验机身垂尾上的刻度为测量标尺,得到引导伞包与伞舱盖转动中心的Y向距离,时间起始点取引导伞包与伞舱盖分离时刻,如表 2和表 3所示。
| 时间/s | Y向距离/m |
| 0.008 | 0.32 |
| 0.016 | 0.38 |
| 0.024 | 0.45 |
| 0.032 | 0.47 |
| 0.04 | 0.5 |
| 0.048 | 0.53 |
| 0.056 | 0.55 |
| 0.064 | 0.57 |
| 0.072 | 0.6 |
| 0.08 | 0.62 |
| 0.088 | 0.68 |
| 0.096 | 0.7 |
| 0.104 | 0.72 |
| 0.112 | 0.73 |
| 0.12 | 0.74 |
| 0.128 | 0.75 |
| 0.136 | 0.76 |
| 0.144 | 0.78 |
| 0.152 | 0.79 |
| 0.16 | 0.8 |
| 0.168 | 0.81 |
| 0.176 | 0.82 |
| 0.184 | 0.83 |
| 0.192 | 0.84 |
| 0.2 | 0.85 |
| 0.208 | 0.86 |
| 时间/s | Y向距离/m |
| 0.008 | 0.32 |
| 0.016 | 0.41 |
| 0.024 | 0.455 |
| 0.032 | 0.5 |
| 0.04 | 0.53 |
| 0.048 | 0.56 |
| 0.056 | 0.61 |
| 0.064 | 0.68 |
| 0.072 | 0.71 |
| 0.08 | 0.73 |
| 0.088 | 0.75 |
| 0.096 | 0.78 |
| 0.104 | 0.81 |
| 0.112 | 0.81 |
| 0.12 | 0.83 |
| 0.128 | 0.85 |
| 0.136 | 0.87 |
由图 14可以看出,风洞开伞试验得到引导伞包在Y向轨迹与理论计算曲线趋势一致,且最大偏离高度小于100 mm。当开伞速度为25 m/s时,试验测得的引导伞包到达螺旋桨上方和平尾末端点的时间为0.088 s和0.168 s,与理论计算值0.098 s和0.166 s分别相差0.01 s和0.002 s,同时,在该两点的Y向距离试验测得分别为0.68 m和0.81 m,均略大于理论计算值0.63 m和0.80 m。当开伞速度为33.3 m/s时,开伞试验测得的引导伞包到达螺旋桨上方和平尾末端点的时间为0.072 s和0.12 s,与理论计算值0.072 8 s和0.118 2 s分别相差0.000 8 s和0.001 8 s,在该两点的Y向距离开伞试验测得分别为0.71 m和0.83 m,理论计算值为0.66 m和0.87 m。

|
| 图 14 引导伞包Y向距离与时间关系图 |
通过以上分析可知,开伞速度为25 m/s和33.3 m/s时,引导伞包在运动至平尾位置前,其Y向距离均大于理论计算值。在运动至平尾附近时,其Y向距离均小于理论计算值。分析原因,在计算引导伞包气动力时,将气动力简化为气动阻力而没有考虑气动升力分量,从而造成Y距离理论计算值较小。但是,当引导伞包运动至平尾附近时,由于开伞通道两侧垂尾对整个流场存在扰流,引导伞包受到两侧垂尾扰流的作用而导致引导伞包Y向运动距离偏小。
6 结论1) 基于所建立的双尾撑布局无人机伞舱盖开启动力学模型,分析了伞舱盖重量、开伞速度和主伞包顶力对于伞舱盖开启力矩的影响关系。
2) 建立双尾撑无人机伞舱盖开启全阶段力矩计算模型,分析不同开伞速度下,伞舱盖转角对开启力矩的影响关系。得到了不同开伞速度下,伞舱盖转角与角速度关系模型。
3) 建立引导伞包运动轨迹模型和引导伞包成功穿越开伞通道解析判定模型。并分析了引导伞包分离角度对于引导伞包运动轨迹的影响。给出了开伞速度在80 km/h和120 km/h区间,引导伞包较为理想的分离角度。
4) 针对25 m/s和33.3 m/s开伞速度,通过地面风洞开伞试验验证了本文建立的动力学分析模型、引导伞包成功穿越开伞通道判定条件和引导伞运动轨迹模型。
| [1] | Christner J H. Shadow 200:A Close Range Solution for the Battlefield Commander[C]//Proceedings of SPIE, 1993:181-190 |
| [2] | Blyenburgh P V. Current and Future UAV Military Users and Applications[J]. Air & Space Europe, 1999, 1(5): 51-58. |
| [3] | Reid S G. Operational Use of the Pioneer Unmanned Aerial Vehicle(UAV) System[C]//Proceedings of SPIE, 1996:123-130 |
| [4] | Wyllie T. Parachute Recovery for UAV Systems[J]. Aircraft Engineering and Aerospace Technology, 2001, 73(6): 542-551. DOI:10.1108/00022660110696696 |
| [5] | Martorana R. WASP—A High-G Survivable UAV[C]//1st UAV Conference, 2002 |
| [6] | Kostelezky M. Ranger Parachute System Redesign[C]//18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, 2005 |
| [7] |
姜海波, 曹树良, 程忠庆. 平板大攻角绕流升力和阻力系数的计算[J]. 应用力学学报, 2011(5): 518-520.
Jiang Haibo, Cao shuliang, Cheng Zhongqing. Lift and Drag Coefficlents of Fiow Around a Flat Plate at High attack Angles[J]. Chinese Journal of Applied Mechanics, 2011(5): 518-520. (in Chinese) |
| [8] | Shabana A A. Dynamics of Multibody Systems[M]. Cambridge: Cambridge University Press, 2005, 3rd Ed. |
| [9] | Raghavan K, Bernitsas M M. Experimental Investigation of Reynolds Number Effect on Vortex Induced Vibration of Rigid Circular Cylinder on Elastic Supports[J]. Ocean Engineering, 2011, 38(5/6): 719-731. |
2. Xi'an ASN Technology Group Co., Ltd, Xi'an, 710065, China
