

2. 西北工业大学 自动化学院, 陕西 西安 710129
近年来, NASA和其他国家的一些航空研究中心对飞行器损坏后性能恢复研究的投入显著增大[1]。20世纪世界大战中战斗机的操纵经验, 民用航空运输中的操纵经验, 以及过去30年军用飞机的操纵经验, 无不表明固定翼飞行器在性能损坏后具备安全着陆的能力[2-5], 具备这种能力可以提高固定翼飞行器的安全性以及适用范围。
无论有人飞机还是无人机, 在其飞行过程中都会遇到故障状况, 例如传感器失效、控制面卡死、发动机失去推力等等。其中发动机失效故障的后果最危险, 如果发动机空中停车, 飞机只能迫降[6]。从美国国家安全委员会网站给出的航空事故报告可以发现, 当发动机失去推力后, 飞行器成功迫降在陆地上的概率非常小, 这是因为在陆地上迫降时, 飞行器在无动力情况下, 其控制权限较小, 保证触地速度和飞行距离很困难, 同时在飞向着陆点的过程需要保证良好的飞行姿态, 避免失速现象。若着陆过程存在大气扰动, 也会对安全着陆有影响[7]。关于有人机迫降成功的案例相对较多, 而公开报到的无人机迫降成功案例, 只有2006年美国空军的"全球鹰", 然而"全球鹰"是在遥控手的操纵下成功迫降在临时跑道上[8], 并非无人机自动迫降。
对无人机无动力迫降的研究, 一些科研单位已经进行了初步的试探性工作, Ted等设计了一种智能座舱系统, 该系统在紧急情况下可以帮助飞行员产生一条四维紧急着陆的路径[9];Atkins等提出了一种紧急管理系统结构, 该系统既可以用于有人飞机, 又可以用于自动驾驶仪, 当飞机出现紧急情况时, 可以第一时间给飞行员提供安全的紧急着陆方案[10], 然而这2种属于方案层级的方法, 并没有给出具体的实施过程;Menon等研究了飞机在失去部分升力和推力情况下的基于质点模型的鲁棒制导律, 仿真结果表明, 该方法对侧风、阵风以及气动模型的不确定性有较强的鲁棒性, 然而该制导律仅是用于进场阶段, 而且该制导律不能同时对飞行器模型的不确定性和环境的不确定性具有鲁棒性[1]。昆士兰科技大学澳大利亚航空航天研究中心对无人机无动力进场阶段的制导方法进行了研究, 而且通过实际的无动力飞行实验证明了该方法的有效性[11-15], 然而该制导律的设计并没有考虑风扰动的影响。本文作者于2014年发表了一篇关于跟踪圆弧轨迹的制导律设计的论文, 但仅涉及到跟踪圆弧的制导律, 为了进一步完善跟踪三维Dubins曲线的研究成果, 本文从跟踪直线路径的角度出发, 提出了一种跟踪下滑直线的自适应非线性制导方法, 不仅包括横向制导律, 也包括纵向制导律。首先根据几何关系推导得到了跟踪下滑直线的横纵向制导律, 并从理论上证明了所得制导律的稳定性;然后考虑到横纵向制导律之间的影响显著, 为了提高制导系统的跟踪精度和抗风扰动能力, 本文利用单神经元PID控制的思想, 设计了一种制导律的自适应方案。仿真结果显示, 当存在常值风扰动以及无扰动的情况下, 所提出的方法均可提高制导系统的跟踪精度, 更适合用于无动力滑行的制导过程。另外, 根据文献[16]可知, 天气灾害和发动机失效故障是主要的航空事故因素, 故本文前提假设为发动机失去推力, 所有操纵面偏转处于正常状态。
1 制导律设计的前提假设条件本文所涉及的Dubins路径问题如图 1所示, 假设飞机故障位置为Pi, 期望到达的终点位置为Pf, 速度为V, 起始和终止航向如图 1所示。本文采用Dubins路径来确定从起始点Pi到终点Pf的最优路径, 为了方便说明问题, 假设最优Dubins路径由圆弧路径


|
| 图 1 Dubins路径 |
假设1 UAV经过圆弧路径
假设2 为了提高UAV空中的滑行时间, 本文采用潜下滑角来滑行, 即下滑航迹角较小。
假设说明:圆弧制导与直线制导之间选择航向作为切换项很容易满足假设1;由于所采用的UAV升阻比较大, 能够满足假设2。
2 横向非线性制导律设计如图 2所示, 在给定的期望轨迹上选取一个参考点Pref, 飞行器向参考点做圆弧靠近, 圆弧的半径为R, 其中L1为飞行器当前位置到参考点之间的距离, 那么当飞行器向期望轨迹靠近时所需的加速度按下式计算
|
(1) |
其他数学符号如图 2所示。

|
| 图 2 制导几何逻辑 |
横向跟踪直线的几何制导逻辑如图 3所示, 当飞机跟踪一条给定的直线路径时, 点Pref为该路径上的一个参考点, L1为飞机当前位置到参考点之间的距离, η为飞机当前位置和参考点之间的直线与空速V的夹角, 利用假设1可知η较小, 则有如下关系式成立

|
| 图 3 横向跟踪直线的几何制导逻辑 |
|
(2) |
且有

|
(3) |

|
(4) |
将(2)~(4) 式代入(1) 式可以得到横向加速度指令
|
(5) |
那么期望的滚转角指令φ按下式计算
|
(6) |
式中,W为重力, m为质量, g为重力加速度, L为升力, ascmd为加速度指令。
3 纵向非线性制导律设计纵向几何制导逻辑如图 4所示。

|
| 图 4 纵向几何制导逻辑 |
飞机当前高度和期望轨迹的高度差d1为

|
(7) |

|
(8) |
式中: XD为飞机当前高度, z0为初始高度, V为空速, γ为航迹角, t为时间。
由假设2可知
|
(9) |
|
(10) |
式中,

|
(11) |
然而纵向加速度指令并不是沿d方向的加速度指令, 往往需要将ancmd加速度指令进行转换, 转换为沿d方向的加速度指令, 此时有

|
(12) |
由于纵向采用空速控制器, 所以当得到纵向过载时, 需要将纵向过载转换为所需的空速指令, 则
|
(13) |
式中, VD为飞机沿z轴的速度分量, 可以通过飞机的输出的下降速度得到。从而总的速度指令为

|
(14) |
对于制导律(5) 式和(11) 式, 加速度指令a均有如下关系式成立

|
(15) |
从而制导律(5) 式和(11) 式均可转换为形式如下的二阶黏性阻尼振动系统

|
(16) |
式中,
令
|
(17) |
式中,M=1, D=2ζωn, K=ωn2。那么当且仅当系统(17) 渐近稳定时, 系统(16) 渐近稳定。
引理 假设A, E, F为n阶实方阵, C∈Rm×n, 如果满足下列条件
1) A=EF;
2 FT+F=-CTC;
3) E>0;
4) (A, C)能观;
那么系统Ẋ=AX渐近稳定。
证明根据引理的条件(4) 和Lyapunov定理, 我们需要找到一个对称正定矩阵P, 且满足如下矩阵方程
|
(18) |
利用引理条件(3) E>0, 我们选取P=E-1, 此时有

|
(19) |
即可以通过其它条件推出条件(2) 成立, 故此时有系统Ẋ=AX渐近稳定。
定理若系统(17) 渐近稳定, 则渐近稳定的充分条件为

|
(20) |
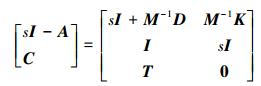
证明 将系统(17) 进行分解可得

|
(21) |
利用(20) 式可知E>0, 且由条件(2) 知存在n阶可逆矩阵T, 使得下式成立
|
(22) |
假设
|
(23) |
则有
|
(24) |
这样满足引理中的条件(1)~(3), 此时只需证明引理中的条件(4) 成立, 就可以证明系统(17) 为渐近稳定。
设
|
(25) |
根据矩阵T可逆可得
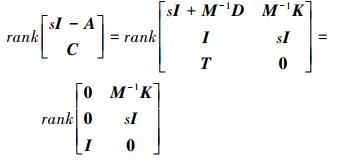
|
(26) |
再由M-1K可逆可知
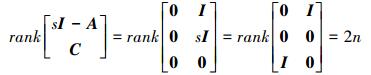
|
(27) |
由线性系统理论中的PBH判据知, (A, C)能观, 这样就证明了引理中条件(4) 的成立, 此时分别将ζ和ωn的值代入M, D, K中, 通过计算可知制导律(5)、(11) 满足条件(20), 从而系统(17) 为渐近稳定, 那么系统(16) 也为渐近稳定。
5 非线性制导律的自适应方案观察(5) 式和(11) 式, 可知横纵向制导律均可以近似为一个PD控制器, 而且空速V和距离L1共同决定了PD控制器的增益, 然而本文纵向采用空速控制器, 目的是将空速稳定在一个给定值上, 这样空速V对该制导律的增益影响不大, 主要影响增益的量是距离L1的大小。由于本文推导的制导律(5) 和(11) 均为欠阻尼特性, 根据公式

|
(28) |
可知, 当ζ为常值时, 通过调整自然频率ωn就可以调节制导律的衰减特性。我们希望当飞机到给定路径的距离大时, 控制器产生大的加速度信号, 距离减小时, 加速度信号的也随着减小。同时我们还希望飞行器具备一定的抗阵风干扰能力, 由制导律(5) 和(11) 表达式易知, 只需调整参数L1就可以达到上述目的。由于单神经元自适应方案具有自学习和自适应能力, 不但结构简单, 学习算法物理意义明确, 计算量小, 收敛速度快, 且能适应环境变化, 具有较强的鲁棒性[17], 所以适合用于无动力状态下的自适应方案设计。
假设L1满足下列形式的等式

|
(29) |
式中,KP、KD和KI为需要在线自适应调整的参数, t为采样时间间隔, (16) 式的通解为
|
(30) |
式中,d0、


|
| 图 5 自适应结构图 |
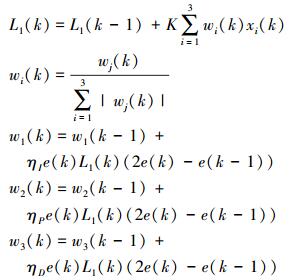
参数L1的按下式进行迭代[18]
|
(31) |
其中学习法则采用改进有监督Hebb学习算法, K为比例系数, K>0, ηI, ηP, ηD为学习速率参数, w为神经元之间的连接权值, e为实际输出和期望输入之间的差值。
6 数字仿真出于对比所提方法有效性的目的, 在仿真实验中仅加入了常值风扰动, 以此来验证所提方法在阵风扰动条件下将无人机拉回给定路径的能力, 扰动风的结果在这里不再给出, 这是由于扰动风主要在无动力着陆时影响无人机[19]。为了从数值上衡量所提方法的有效性, 这里给出如下性能指标的定义。
定义1

|
定义2

|
其中定义1表明3个坐标轴(x轴, y轴, z轴)分别的跟踪误差, n为采样点的个数, 即仿真飞行结束后采集数据的个数, d-dcmd为飞行器当前位置到给定路径的偏差; 定义2表示三维空间跟踪误差, 在定义1的基础上计算得到定义2的性能指标。
6.1 不带风扰动的数字仿真初始位置设定为x=0, y=2 000, z=3 000 (单位为m), 初始速度为30 m/s, 仿真时间设定为300 s, 无常值阵风干扰情况下三维直线跟踪图解如图 6和图 7所示, 相应的跟踪误差如图 8和图 9所示, 实直线是给定的期望路径, 虚直线为实际飞行的路径。

|
| 图 6 非自适应制导三维跟踪 |

|
| 图 7 自适应制导的三维跟踪 |

|
| 图 8 非自适应制导三维跟踪误差 |

|
| 图 9 自适应制导的三维跟踪误差 |
由定义2的性能指标计算得到非自适应制导律的平均跟踪误差为MSE=8.939 6 m, 自适应制导律的平均跟踪误差为MSE=7.262 6 m, 跟踪精度有所提高, 并且跟踪误差渐近收敛。
6.2 带常值风扰动的仿真利用Simulink阵风模型, 在100 s处对UAV加上3 m/s的常值风扰动, 阵风扰动持续时间为10 s, 为了方便说明问题, 本文只给出三维跟踪误差实验结果, 如图 10和图 11所示。

|
| 图 10 非自适应制导律三维跟踪误差 |

|
| 图 11 自适应制导律三维跟踪误差 |
由定义2的性能指标计算得到非自适应制导律的平均跟踪误差为MSE=16.718 0 m, 自适应制导律的平均跟踪误差为MSE=13.151 8 m, 最终的收敛距离非自适应制导方法大约为18 m, 自适应制导方法大约为13 m, 这表明, 制导律加入自适应方案后, 在有干扰的情况下, 所提出的自适应制导方法能够更好的将无人机拉回期望的直线路径, 跟踪误差较小, 且跟踪误差渐近收敛。
综上所述, 无论有无常值风扰动, 系统的跟踪误差都是稳定收敛的, 且都提高了系统的跟踪精度。而且从仿真结果可以发现, 一方面, 在无常值风扰动的情况下, 仿真结果验证了制导律稳定性定理的正确性, 从实验的角度说明了制导律是渐近收敛的; 另一方面, 无论有无常值风干扰, 本文所设计的制导律自适应方案均可以提高系统的跟踪精度, 而且不影响制导律的稳定性。另外, 需要指出的是, 本文采用无动力的小型无人机作为研究对象, 其对风扰动敏感度较高, 随着给定风速的增大, 系统的跟踪误差也随之增大, 导致无动力飞行器着陆的失败[11]。
7 结论当无人机发动机突然空中停车时, 只能通过滑翔的方式进行迫降, 此时长周期模态起主要作用, 这使得横纵向制导之间存在较为明显的影响。为了提高制导系统的性能, 本文针对无动力滑翔过程中跟踪直线的制导问题, 提出了相应的解决方案, 同非自适应制导律相比, 得到以下几个结论:
1) 从实验的数值结果可知, 无论有无常值阵风扰动, 所提出的方法均提高了制导系统的跟踪精度, 适合无动力状态下的制导律设计。
2) 针对所提制导律稳定性分析的问题, 本文利用了系统稳定性的思想, 将制导律转化为一个二阶黏性阻尼振荡系统, 再将该振荡系统转化为一个零输入系统, 从系统稳定性的角度证明了所提制导律的稳定性。另外, 从系统稳定性的证明过程看, 该制导律稳定性证明可以指导控制律的设计。假设系统(17) 存在控制输入, 例如Ẋ=AX+Bu, 若利用状态反馈来寻找使该系统稳定的控制律u, 设u=kX, 则系统可转化为Ẋ=(A+kB)X, 这样就可以通过(20) 式来选定参数k使得系统满足特定的控制要求, 从而达到指导控制律设计的目的。
3) 该方法即可以用于无动力无人机滑翔的制导过程, 又可以用于无动力有人机滑翔制导过程, 另外无动力滑翔弹也可以采用这种制导方法。
| [1] | Menon P K, Vaddi S S, Sengupta P. Robust Landing Guidance Law for Impaired Aircraft[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(6): 1865-1877. DOI:10.2514/1.54213 |
| [2] | Rolf R, Anthony C. Fault Tolerant Flight Control via Adaptive Neural Network Augmentation[C]//Guidance, Navigation, and Control Conference and Exhibit, 1998:1722-1728 |
| [3] | Tandale M, Valasek J. Fault-Tolerant Structured Adaptive Model Inversion Control[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(3): 635-642. DOI:10.2514/1.15244 |
| [4] | Nhan N, Kalmanje K, John K, et al. Dynamics and Adaptive Control for Stability Recovery of Damaged Asymmetric Aircraft[C]//AIAA Guidance Navigation and Control Conference, 2006:1-24 |
| [5] | Nguyen N T, Krishnakumar K S, Kaneshige J T, et al. Flight Dynamics and Hybrid Adaptive Control of Damaged Aircraft[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(3): 751-764. DOI:10.2514/1.28142 |
| [6] | Borst C, Sjer F A, Mulder M, et al. Ecological Approach to Support Pilot Terrain Awareness after Total Engine Failure[J]. Journal of Aircraft, 2008, 45(1): 159-171. DOI:10.2514/1.30214 |
| [7] | Huang Degang, Wu Yunyan. A Method of Height Adjustment for Unpowered Emergency Landing[J]. Applied Mechanics, Materials and Manufacturing, 2014, 670/671: 1410-1415. DOI:10.4028/www.scientific.net/AMM.670-671 |
| [8] | Yufei S, Ziaur R. An Automatic Computer-Aided Detection System for Aircraft Emergency Landing[C]//Proceedings of the AIAA Infotech at Aerospace Conference, 2011:779-788 |
| [9] | Ted C, Amy P. Cockpit Decision-Aids for the Task of Emergency Trajectory Generation[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001:1-11 |
| [10] | Atkins E M, Portillo I A, Strube M J. Emergency Flight Planning Applied to Total Loss of Thrust[J]. Journal of Aircraft, 2006, 43(4): 1205-1216. DOI:10.2514/1.18816 |
| [11] | Eng P L, Mejias X Liu, Walker R. Automating Human thought Processes for a UAV Forced Landing[J]. Journal of Intelligent and Robotic Systems, 2010, 57(1/2/3/4): 329-349. |
| [12] | Mejias L, Eng P. Controlled Emergency Landing of an Unpowered Unmanned Aerial System[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1/2/3/4): 421-435. |
| [13] | Mejias L, Fitzgerald D L, Eng P C, et al. Aerial Vehicles[M]. Austria: InTech Press, 2009: 415-442. |
| [14] | Eng P, Mejias L, Walker R A, et al. Simulation of a Fixed-Wing UAV Forced Landing with Dynamic Path Planning[C]//Australasian Conference on Robotics and Automation, 2007:1-11 |
| [15] | Mejias L, Eng P. Experimental Validation of an Unpowered Unmanned Aerial System:Application to Forced Landing Scenarios[C]//Digital Proceedings of the 2012 International Conference on Unmanned Aircraft Systems, 2012:1-12 |
| [16] | Boeing Corporation. Statistical Summary of Commercial Jet Airplane Accidents, Worldwide Operations 1959-2013[EB/OL]. (2015-04-08)[2017-05-16]. http://www.boeing.com/news/techissues/pdf/statsum.pdf |
| [17] |
刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2004: 153-158.
Liu Jinkun. Mathab Simulation of Advanced PID Control[M]. Beijing: Electrouic Industry Press, 2004: 153-158. (in Chinese) |
| [18] |
黄得刚, 章卫国, 张秀林. 无人机无动力滑行横向自适应非线性制导律设计[J]. 控制理论与应用, 2014, 31(11): 1486-1491.
Huang Degang, Zhang Weiguo, Zhang Xiulin. Design of the Lateral Adaptive Nonlinear Guidance Law for Unpowered Unmanned Aerial Vehicle Gliding[J]. Control Theory & Applications, 2014, 31(11): 1486-1491. (in Chinese) |
| [19] | Eng P. Path Planning, Guidance and Control for a UAV Forced Landing[M]. Queensland, Australia: Queensland University of Technology, 2011: 101-106. |
2. School of Automation, Northwestern Polytechnical University, Xi'an 710129, China
