

2. 哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 150001
随着嵌入式计算和通信技术的发展,网络化控制系统 (networked control system, NCS) 往往基于嵌入式处理器实现,并通过现场总线或工业无线网络形成闭环。然而,上述网络化控制系统中,尤其是无线网络,带宽资源是有限的,因此控制策略的设计除了要考虑控制性能还需要考虑带宽资源的合理分配。
因此,控制与资源调度协调设计吸引了很多研究者的注意,所采用的方法可以被大致分为静态和动态2类,静态方法控制律和调度策略都被离线设计[1], 而动态方法则根据实测的系统状态在线调整控制律和资源分配[2]。上述研究,在计算资源约束下提高系统控制性能方面取得了一定效果,但是其资源使用却不一定是高效的。其主要原因在于上述研究的控制或调度策略都是基于系统状态采样的周期传输,进而周期调整、更新控制命令和调度指令,而不管当前时刻系统是否已经平稳运行,而事实上,控制系统只有在瞬态时,才需要较高频率的状态采集和控制调整,当系统进入平衡状态后,该频率可以大幅降低。
鉴于此,为了减少控制系统对网络带宽等计算资源的不必要占用,基于事件触发的控制策略逐渐引起了研究人员的关注。与基于周期更新的控制策略不同,基于事件触发的控制系统由事件触发条件决定是否有必要进行采样值传输及计算控制律。针对这类方法的研究目前主要集中在事件触发条件下闭环控制系统的分析与综合方法, 例如,文献[3]采用Lyapunov方法结合线性矩阵不等式 (linear matrix inequalities, LMIs) 设计在不同事件触发机制下保证闭环控制系统稳定的控制策略。这类方法仅考虑资源受限下基于给定事件触发机制的控制策略设计,而忽略了事件触发机制的调整对控制策略的影响以及事件触发下资源的调度问题。事实上,事件触发机制的设计对控制律设计影响较大,而资源的合理分配更关系到事件触发机制的可行性。因此,对控制律、事件触发机制和资源调度策略应进行联合设计。文献[4]给出了事件触发控制与带宽调度的基本概念;文献[5]基于LMIs研究了误差阈值事件触发机制下系统输出反馈闭环控制律与事件触发条件阈值的协调设计方法,并利用最优化讨论了扩大系统采样最小传输间隔的方法。文献[6]针对考虑网络诱导时延的线性参数变化系统提出一种参数依赖控制律和参数依赖混合事件触发条件的协调设计策略,并将协调设计问题归结为多胞顶点LMIs求解问题,以解决无限维优化问题。上述研究在解决事件驱动的参数不确定系统控制与事件触发机制协调设计方面给出了值得借鉴的方法并在提高控制性能和降低资源占用率方面取得了良好的效果,但上述研究未考虑事件触发机制下调度策略对系统性能的影响。文献[7]提出了一种事件触发的Try-Once-Discard带宽调度机制,并利用参数不确定切换系统和LMIs研究调度策略与H∞鲁棒控制律的协调设计,但该研究在求解LMIs时,未考虑切换系统的事件触发 (即状态切换) 约束条件。文献[8]基于系统状态误差二次型设计采样数据传输触发条件,利用LMIs提出了一种控制律、事件触发器和带宽调度策略的协调设计方法,试图使误差二次型最大的控制回路优先获得网络使用权,但未考虑网络不确定延迟对控制系统的影响。
鉴于上述分析,本文提出了一种系统化的控制律、资源调度、事件触发机制一体化协调设计方法。利用参数不确定切换系统描述事件触发的有界随机延迟离散时间系统,在此基础上构造合适的Lyapunov函数并利用线性矩阵不等式可行性一体化设计鲁棒控制律、状态采样事件触发机制及带宽调度策略,使系统在随机有界延迟、事件触发采样和传输调度策略共同约束下保持闭环全局渐进稳定,并通过基于TrueTime的仿真实验,验证提出方法的有效性和优势。
1 系统建模 1.1 系统拓扑结构本文研究的网络化控制系统结构如图 1所示。系统包括若干共享网络和控制器节点的控制回路P={Pi, i=1, …, N}, 控制回路i中, 分布式传感器以周期hi采集被控对象状态。事件发生器σi(k), i=1, …, n用于判断k×hi时刻, 控制回路i传感器采集的数据是否有必要通过网络传输进而触发控制律计算并传输更新的控制指令至相应的执行器。调度器δ(k):Rn={0, …, N}用于仲裁k×hi时刻存在多个节点同时申请访问网络时, 能够最先获得访问权限的节点。当δ(k) 为0时表示当前时刻没有节点请求访问网络。τsc、τca分别表示传感器到控制器、控制器到执行器的网络传输延迟, 在本文中, 上述延迟是有界时变的。

|
| 图 1 网络控制系统结构 |
设图 1所示NCS中的被控对象为连续时间线性时不变系统, 考虑输入延迟τ(t), 系统可由如下方程描述:

|
(1) |
式中, Ac∈Rn×n结构矩阵, Bc∈Rn×m为输入矩阵, x(t)∈Rn为状态向量, u(t-τ(t))∈Rm为控制输入向量。τ(t)=τsa(t)+τca(t) 是随机延迟, 我们假设其不大于系统采样周期 (该假设条件一般可以由调度策略如RM、EDF保证)。
令h表示控制回路采样周期, 考虑事件触发, 若tk=k×h时刻控制回路传送采样数据及更新控制输入, 则

|
(2) |
式中, tk≤t < tk+1为采样间隔。
若tk时刻控制回路不满足控制触发条件, 则控制输入保持上一周期的值, 即

|
(3) |
根据方程 (2) 对方程 (1) 所示连续系统进行离散化有

|
式中
|
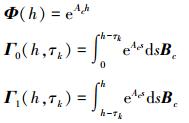
令z (k)=(xT(k) u T(k-1))T, 可得到增广离散方程
|
(4) |
式中,I为合适维数的单位阵。
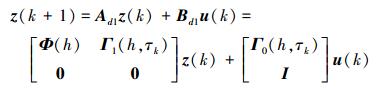
类似地, 根据方程 (3) 离散化连续系统 (1), 可得
|
(5) |
式中, Γ1(h)=∫0heAcsdsBc。
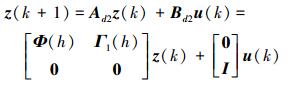
由于τk∈[0, h]是不确定的, 所以方程 (4) 是参数不确定离散系统, 为方便设计鲁棒控制器, 我们对其进行如下变换[7], 令
|
则Γ0(h, τk), Γ1(h, τk) 可以被写为

|
(6) |

|
(7) |
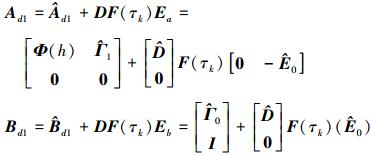
将方程 (6)、(7) 代入方程 (4), 则Ad1、Bd1可以重写为
|
容易证明, FT(τk)F(τk)≤I。
于是, 方程 (4) 可以被重写为
|
(8) |
方程 (8) 的形式容易根据相关理论处理不定项F(τk), 具体方法在下节详述。
2 事件触发鲁棒控制与调度协调设计 2.1 事件触发条件与调度策略我们采用文献[8]中使用的二次型触发条件

|
(9) |
式中, Q1、Q2为对称正定阵。
上述条件说明, tk时刻系统状态测量值的加权欧几里得范数相对于tk-1时刻是“发散”的, 这意味着系统需要根据新的量测值计算控制律并更新控制输入, 以使系统趋于稳定。
于是我们的采样传输及控制输入更新触发条件为

|
(10) |
式中, ẑ(k)=(zT(k) zT(k-1))T, Q=diag(Q1, -Q2)。当σ(k)≠0时, 触发采样传输及控制输入更新。
当网络中有多个控制回路等满足 (10) 所示的网络访问触发条件时, 就需要调度策略仲裁当前时刻获得网络访问权限的回路。我们采用 (11) 式所示的事件触发条件依赖动态调度策略

|
(11) |
式中, hi、σi(k) 分别表示控制回路i的采样周期和状态量测的加权欧几里得范数。
容易看出, 调度策略 (11) 使单位时间内状态“发散”最严重的控制回路获得总线访问优先权。δ(k)=0表示当前时刻没有控制回路需要发送数据。方程 (11) 所示的调度策略可以用很低的开销在传感器端分布式的生成消息优先级, 适用于当前多种主流的有线/无线网络协议, 如生成CAN协议中的消息优先级; IEEE802.5令牌环中的优先级位; Wireless-Hart协议中调度轮询帧等。
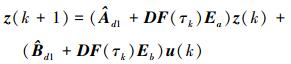
2.2 协调设计过程考虑方程 (10) 所示的事件触发条件, 方程 (4)、(5) 所示的系统离散状态方程可以写成如下形式的参数不确定切换系统

|
(12) |
式中, Ad1=Âd1+DF(τk)Ea, Bd1=
本文提出的协调设计过程可以被归结为如下命题:
命题1 求解得到状态反馈控制律u(k)=Kz(k) 和事件触发条件 (此处即矩阵Q) 使得系统 (12) 全局渐进稳定。
我们提出定理1解决命题1。
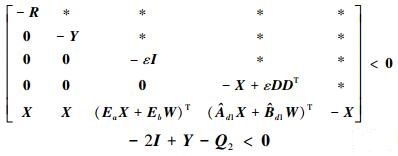
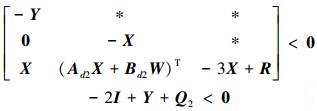
定理1 如果存在正定对称阵X, Y, R, Q2, 标量ε > 0以及合适维数的矩阵W, 使得如下LMIs可行
|
(13) |
|
(14) |
式中, “*”表示对称元素, I为合适维数的单位阵。则, 命题1中待求解的控制律为u(k)=Kz(k)=WX-1z(k), 事件触发条件Q=diag(Q1, -Q2)=diag(R-1, -Q2)。
定理1的证明过程详见文献[9]。
定理1中LMIs的可行性问题, 可以方便地通过MATLAB中feasp求解器得到结果, 于是, 我们可以同时设计系统的控制律和事件触发条件, 使系统在存在随机有界延迟及基于事件触发条件的调度策略 (11) 下, 保持全局渐进稳定。
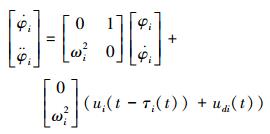
3 验证实例本节用一个拓扑结构如图 1所示, 包含3个倒立摆的网络化控制系统, 验证提出的协调设计方法的有效性。仿真实验平台使用基于MATLAB的网络化实时控制系统仿真工具包TrueTime搭建。研究的一级直线倒立摆Pi (i∈{1, 2, 3}) 的线性化模型如下
|
(15) |
式中, ωi={5, 4, 3} rad/s表示倒立摆Pi的自然频率, φi表示以竖直位置为平衡点的摆角/rad, ui(t) 表示作用在小车上的力/N, udi/(t) 表示干扰力/N。
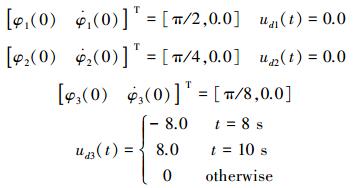
设置倒立摆Pi的初始状态及干扰力如下
|
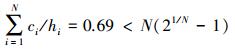
假设研究的控制回路中采样数据包和控制命令数据包包长之和(li)为640 bits, 当网络传输速率为100 kbits/s时, 这些数据包的传输时间(ci)为6.4 ms。我们根据系统的性能要求可以确定出传感器采样周期的上限, 而采样周期的下限一般被网络的带宽调度策略约束。我们选择控制回路中的采样周期为h1=20 ms, h2=30 ms, h3=40 ms, 符合RM实时调度策略的可调度性约束条件
|
(16) |
式中, N为控制回路数, 此处取3。
条件 (16) 保证了在全部控制回路同时申请网络访问时, 数据包传输延迟不大于传感器的采样周期, 即满足1.2节离散时间模型的假设条件。应注意到, 我们研究的系统中传感器按采样周期测量系统状态, 但本周期是否需要通过网络向控制器节点传送该状态却是由方程 (10) 所示的事件触发条件决定的。我们期望通过所提出的协调设计方法, 使系统在产生较小的网络负载下获得满意的控制性能。
基于选定的采样周期, 并将系统 (15) 中相关参数代入LMIs (13) 式、(14) 式, 利用MATLAB下的feasp求解器得到各控制回路的可行控制增益
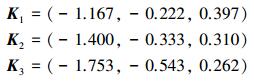
|
以及事件触发条件矩阵
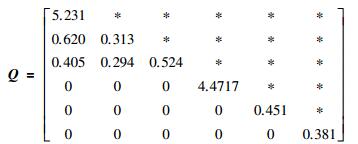
|
系统仿真运行结果如图 2~图 4所示。图 2展示了提出的协调设计方法下, 网络中倒立摆系统Pi(i∈{1, 2, 3}) 在非零初始条件及冲击干扰下的响应。事件驱动下的网络数据包传送如图 3所示, 其中各控制回路中传感器节点根据调度策略 (11) 确定访问网络的优先级, 向控制器节点发送采样数据, 控制器节点由接收到新的采样数据触发控制律计算并继承当前相应传感器数据包的优先级向执行器节点发送更新的控制量。当t∈[0.0, 5.0]s, 各控制回路需要将倒立摆摆角从初始状态调整到平衡态, 在每个采样周期都触发数据发送及控制律更新, 此时的带宽占用率约为67.3%, 当倒立摆平稳后, 由于每个采样周期事件触发条件不再总是满足, 数据发送频率大幅降低。P3倒立摆在第8秒和第10秒时, 由于作用于小车的干扰造成摆角偏离平衡点, 其采样数据发送再次被高频率触发, 直至其回到平衡点, 其采样数据发送频率再次下降。事件驱动下的平均带宽占用率只有18.1%。

|
| 图 2 不同初始条件及干扰下各控制回路倒立摆摆角响应 |

|
| 图 3 事件驱动网络数据包传送 (平均带宽占用率18.1%) |

|
| 图 4 事件驱动、时间驱动系统二次型性能比较 |
作为比较, 我们采用传统的采样数据、控制输入周期发送 (带宽占用率设定为30%) 并设计控制律, 进行对比实验。图 4展示了我们提出的事件驱动协调设计方法和周期 (时间) 驱动方法, 在倒立摆P3存在冲击干扰的情况下, 取得的二次型控制性能 (由 (17) 式定义)

|
(17) |
此处, Q、R取合适维数的单位阵, M是采样点数。
显然, 相比于时间驱动的控制方法, 我们提出的事件驱动协调设计方法只在系统状态相对于平衡点偏差符合事件触发条件时, 才触发发送调度, 因此可以占用较少的带宽资源 (平均带宽占用率18.1% vs 30.0%) 取得较好的控制性能。
4 结论本文针对带宽资源受限的网络化控制系统, 提出一种考虑网络诱导随机有界延迟的事件驱动控制律、事件触发条件和带宽调度策略一体化协调设计方法。采用参数不确定离散时间切换系统对事件驱动的网络化控制系统建模, 选取合适的Lyapunov函数, 并基于线性矩阵不等式解决控制、事件触发、带宽调度的协调设计问题。仿真实验表明, 本文提出的协调设计方法可以使系统在事件驱动条件及带宽调度策略的作用下依然保持一致渐进稳定, 且由于系统对带宽的占用由事件在必要条件下触发, 因此可以在较小的带宽占用率下获得更好的控制性能。
| [1] | Longo S, Herrmann G, Barber P. Optimization Approaches for Controller and Schedule Co-Design in Networked Control[C]//Proceedings of the 6th IFAC Symposium on Robust Control Design, 2009: 301-306 |
| [2] | Li Z, Wang W, Jiang Y. Intelligent Scheduling and Optimisation for Resource-Constrained Networks[J]. IET Control Theory & Applications, 2010, 4(12): 2982–2992. |
| [3] | Forni F, Galeani S, Neši D. Event-Triggered Transmission for Linear Control over Commun ication Channels[J]. Automatica, 2014, 50(2): 490–498. DOI:10.1016/j.automatica.2013.11.001 |
| [4] | Rabi M, Johansson K H. Scheduling Packets for Event-Triggered Control[C]//Proceedings of the European Control Conference, 2009: 3779-3784 |
| [5] | Abdelrahim M, Postoyan R, Daafouz J. Co-Design of Output Feedback Laws and Event-Triggering Conditions for Linear Systems[C]//Proceeding of 53rd IEEE Conference on Decision and Control, 2014: 3560-3565 |
| [6] | Li S, Sauter D, Xu B. Co-Design of Event-Triggered H∞ Control for Discrete-Time Linear Parameter-Varying Systems with Network-Induced Delays[J]. Journal of the Franklin Institute, 2015, 352(5): 1867–1892. DOI:10.1016/j.jfranklin.2015.02.001 |
| [7] | Zhou C, Du M, Chen Q. Co-Design of Dynamic Scheduling and H-Infinity Control for Networked Control Systems[J]. Applied Mathematics & Computation, 2012, 218(21): 10767–10775. |
| [8] | Al-Areqi S, Görges D, Liu S. Event-Based Networked Control and Scheduling Codesign with Guaranteed Performance[J]. Automatica, 2015, 57(7): 128–134. |
| [9] | Niu Yun, Liang Yalin, Yang Huizhen. Event-Triggered Robust Control and Dynamic Scheduling for Networked Control System[C]//Proceeding of 2017 14th International Bhurban Conference on Applied Sciences and Technology, 2017: 237-243 |
2. Automation College, Haribin Engineering University, Harbin 150001, China
