


2. 大连理工大学 工业装备结构分析国家重点实验室, 辽宁 大连 116024
轻量化设计使得薄壁结构在航空航天等领域应用越来越多[1], 但同时也存在变形与振动的问题。在这些常规的弹性材料上嵌入或者埋入压电智能材料作传感器或执行器, 使结构具有自感知和自控制特性, 可有效控制结构的变形与振动的抑制, 通常称这种结构为压电智能结构。这种智能结构的应用前景十分广泛, 但其高昂的成本以及诸多不确定性使实验变得费时费力, 而仿真能够模拟真实情况且易于实现和更改, 由此, 对压电智能结构的设计和仿真对智能结构的设计就显得尤为必要和重要。
在形状控制方面, Koconis等[2]首次提及了对压电智能结构施加固定电压以产生固定形状的问题, 对板壳结构进行了分析。在此之后的研究中, Chee等[3]提出了一种基于迭代的扰动电压分布算法, 对形状控制的电压进行优化计算;Nyugen等[4]针对非矩形压电制动器进行研究, 建立有限元模型, 并根据板壳三阶剪切变形理论和分层理论建立形变模型, 通过线性最小二乘法计算控制电压;王剑等[5]建立了压电曲壳和主体结构的整体有限元模型, 并通过最小二乘法计算静态形状控制电压。更进一步地, 姚林泉和丁睿[6]考虑非线性压电效应, 导出压电层合板的广义本构关系, 利用Ritz法和双傅里叶级数计算非线性解。
在振动控制方面, 以速度反馈居多, 比如Liu等[7]通过基于一阶剪切形变假设的无网格模型实现了速度负反馈控制仿真;Kang等[8]通过实验验证了速度负反馈下的振动控制。此外, Narayanan和Balamurugan[9]基于一阶剪切形变模型提出了Lyapunov反馈控制。最优控制理论在智能结主动振动控制仿真方面也受到了很多学者的研究。其中, 基于经典板壳理论[8]、Timoshenko梁理论[9]和一阶剪切形变板理论[10]的线性二次型调节(LQR)控制为主流。由于LQR为全状态反馈控制, 就需要知道所有的状态变量, 限制了它的应用。鉴于此, Vasques和Rodrigues[11]提出了线性二次型高斯/线性二次型调节(LQG/LQR)控制, 通过测量信号实现状态变量的估计。而为了克服主被动控制存在的体积庞大、适应能力差等缺点, 季宏丽等[12]提出了一种基于同步开关阻尼技术的半主动振动控制的新方法。Zhang等[13]基于外界未知干扰的影响, 提出了抗扰控制方法, 对未知干扰进行控制。
本文主要针对压电智能悬臂梁的形状控制以及在控制形状时产生额外振动的问题, 研究如何对悬臂梁的形状进行优化控制和对在变形时由惯性力产生的振动进行主动抑制并进行仿真。对形状的优化控制, 运用最小二乘法, 在获取少量位置信息的情况下计算形状控制的最优电压值。在进行振动控制时, 直接将目标形状的位置信息作为输入量, 运用PID控制算法, 对悬臂梁进行主动振动控制, 使悬臂梁快速达到目标形状并处于稳定状态, 并能够消除稳态误差, 这是现有一些方法所不具备的。
1 压电层合结构静力学模型及最优形状控制
本文所涉及到的智能结构为普通弹性薄壁材料嵌入压电片, 也称为压电层合结构, 如图 1所示。Θ1、Θ2、Θ3构成全局坐标系, 

|
| 图 1 压电层合结构 |
为了能实现智能结构形状与振动控制仿真, 需要建立压电层合结构静力学和动力学模型。首先在这一部分建立静力学模型, 以实现压电结构的形状控制。基于一阶剪切变形假设, 考虑线性压电本构方程, 采用有限元方法和虚功原理建立静力学平衡方程如下[14]

|
(1) |
式中, q为节点位移向量,

给出预定目标形状后, 通过给压电材料附加电压使压电智能薄壁结构发生形变, 并且使其上某些点处的位移逼近于预定目标形状来实现形状的控制。为了衡量压电智能薄壁结构变形与预定目标形状的接近程度, 优化目标可定义为
|
(2) |
式中, di表示测量点的实际位移, dir表示测量点的目标位移, N为测量点的个数。由静力学模型, 外力为零, 可得由电压致动所致位移为
|
(3) |
在本问题中, 所有di构成的位移向量为d, dir构成向量为dr。向量d的元素都来源于总位移向量q。由此关系可知, d对应的系数矩阵K也应是总位移向量q对应的总系数矩阵

|
(4) |
由(2)式对e求di偏导, 可得使e取最小值的条件di=dir, 由此可得到多元一次方程组
|
(5) |
公式中P为压电致动器个数。N和P的大小不定, 导致方程组内方程和未知数个数不定。当所取位移个数N大于PZT个数P时, 则方程个数大于未知数个数, 此方程组为超定方程组;所取位移个数N等于PZT个数P时, 则方程个数等于未知数个数, 为标准方程组;所取位移个数N小于PZT个数P时, 则方程个数小于未知数个数, 此方程组为不定方程组。
在方程个数与未知数个数不等时, 方程组可能不存在精确解, 或不是唯一解。且方程组无法通过常规方法求解, 可通过最小二乘法来求解。即有

|
(6) |
在K为列满秩矩阵时, 方程有唯一解。
基于板壳一阶剪切变形假设, 采用线性压电本构方程, 应用有限元方法及哈密顿原理建立机电耦合压电智能结构动力学方程

|
(7) |
式中, q、
根据机电耦合压电智能结构动力学方程, 可建立状态空间方程
|
(8) |
式中, 状态变量

|
(9) |
状态空间方程的各系数矩阵为
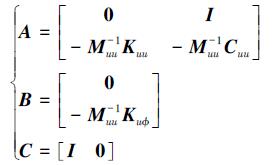
|
(10) |
通过形状控制, 可以获得一组使悬臂梁最接近目标形状的电压值。但在加入电压后, 由于受到惯性力的影响, 悬臂梁会产生振动, 由此引入PID策略, 对悬臂梁的振动加以控制。将状态方程与闭环控制结合, 形成主动振动控制。PID控制器由比例单元、积分单元和微分单元三部分组成, 如图 2所示。

|
| 图 2 智能结构PID控制回路 |
图 2中, r(t)表示最终测量点的目标位移, y(t)表示悬臂梁测量点的实际位移, e(t)表示实际与目标间的误差值, u(t)为状态方程的输入量, 且有

|
(11) |
根据PID控制策略, 状态方程输入量u(t)可表示为

|
(12) |
式中, KP表示比例参数, KI表示积分参数, KD表示微分参数。
由(12)式可知u(t)中包含积分项, 为了在之后运算便捷, 引入一个新的变量来表示此积分项, 即
|
(13) |
也就有

|
(14) |
即

|
(15) |
由于有新的变量形式输入状态方程, 于是将状态量改变为
根据新的状态量
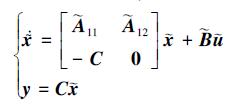
|
(16) |
式中
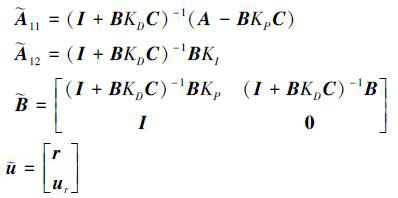
|
(17) |
通过PID控制器输入到状态方程的输入量u可表示为

|
(18) |
式中,u表示用于动态调整的振动抑制电压, 而最终施加在压电片上的控制电压uc为
|
(19) |
本部分对一种多压电悬臂梁进行仿真。此悬臂梁的尺寸为425 mm×25 mm×0.8 mm, 从距离固定端25 mm的位置开始, 每隔25 mm粘有一块压电材料, 共8片, 压电材料的尺寸为25 mm×25 mm×0.25 mm, 如图 3所示。

|
| 图 3 压电悬臂梁结构示意图 |
悬臂梁的材料为钢, 其参数为杨氏模量Y=210 GPa, 泊松比v=0.3, 密度ρ=7 900 kg/m3。压电材料型号为PIC-151, 其主要材料参数为Y=66.667 GPa, v=0.34, ρ=7 800 kg/m3, d31=d32=-210×10-12C/N。
为研究控制效果, 选取了17个位移测量点, 如图 3所示, 分别研究了3组不同测量点组成的形状及振动控制问题, 如表 1所示。
根据测量点的不同, 对悬臂梁的形状控制会产生不同的效果。根据机电耦合静力学模型, 通过目标形状函数获取不同情况下的测量点位移信息, 进而计算出电压值来进行形状控制。
3.2.1 目标形状为幂函数给定预定目标形状函数为y=10-5x2, 按表 1所选测量点情况, 根据本文所提出的方法进行优化计算, 可以得不同情况下的形状控制图像如图 4所示, 依次为5个、8个和17个测量点时的形状最优控制, 控制电压分别如表 2所示。

|
| 图 4 不同测量点个数下的形状控制图 |
| 5个测量点 | 8个测量点 | 17个测量点 |
| -110.59 | -110.39 | -110.31 |
| -62.11 | -60.95 | -61.18 |
| -87.25 | -91.01 | -90.83 |
| -85.25 | -82.19 | -82.25 |
| -81.71 | -85.08 | -84.93 |
| -100.90 | -84.32 | -84.06 |
| -50.16 | -79.04 | -85.28 |
| 3.12 | 4.98 | -79.42 |
运用ABAQUS软件对压电悬臂梁的形状控制进行仿真验证。在软件中仿真结果如图 5所示, 为17个位移测量点时压电悬臂梁的变形情况, 变形程度按1∶50比例尺放大, 实际位移量如图中左上角所示。将ABAQUS仿真结果放入Matlab与其仿真结果进行比较, 如图 4所示, 图中虚线即为ABAQUS仿真结果。可见其接近于目标函数, 误差较小, 计算结果精度足够。

|
| 图 5 目标函数为幂函数时ABAQUS仿真结果 |
给定预定目标形状函数为

|
| 图 6 不同测量点个数下的形状控制图 |
| 5个测量点 | 8个测量点 | 17个测量点 |
| 128.47 | 127.62 | 127.67 |
| 193.53 | 184.20 | 188.91 |
| 60.96 | 81.42 | 75.91 |
| -101.05 | -109.22 | -112.40 |
| -208.92 | -195.62 | -195.79 |
| -44.03 | -103.03 | -100.08 |
| -7.77 | 71.81 | 90.73 |
| -0.08 | -5.33 | 182.37 |
运用ABAQUS软件对压电悬臂梁的形状控制进行仿真验证。在软件中仿真结果如图 7所示, 为17个测量点时压电悬臂梁的变形情况,变形程度仍按1∶50比例尺放大, 比较可发现其有同样的良好控制效果。通过对2组不同目标形状控制的仿真分析可以发现, 当位移信息越多且覆盖整个形状越广时, 控制效果越好。

|
| 图 7 目标形状为正弦函数时ABAQUS仿真结果 |
表 4给出了这2种目标函数在8个测量点情况下形状控制的误差。h表示目标位移, e表示实际位移与目标位移之间的误差。通过表中数据可以发现, 形状控制种每个测量点的误差很小, 整体误差也足够小, 说明了算法的准确性。
| 目标形状为指数函数型 | 目标形状为正弦函数型 | ||
| h | |e| | h | |e| |
| 0.050 0 | 1.858×10-10 | -0.019 0 | 2.348×10-5 |
| 0.200 0 | 6.299×10-11 | -0.130 9 | 1.569×10-5 |
| 0.450 0 | 9.182×10-11 | -0.343 1 | 3.440×10-5 |
| 0.800 0 | 2.073×10-10 | -0.570 8 | 1.630×10-5 |
| 1.250 0 | 9.199×10-13 | -0.715 1 | 2.908×10-5 |
| 1.800 0 | 1.168×10-10 | -0.753 5 | 2.986×10-5 |
| 2.450 0 | 9.130×10-12 | -0.761 2 | 3.839×10-5 |
| 3.200 0 | 5.625×10-8 | -0.841 3 | 2.301×10-5 |
 | |||
对由状态空间方程和PID闭环控制构成的主动控制系统仿真, 并对不同参数的振动控制效果进行比较, 可以得到较好的控制效果。参数如表 5所示。
给定预定目标形状函数为y=10-5x2, 可求得达到形状控制的一组电压值。在0时刻输入测量点的目标位移信息进行控制。由于同一组参数对8个点的控制效果相似, 则取第8点为例, 对不同参数的控制效果进行比较。控制的输出信号和控制电压信号如图 8所示。

|
| 图 8 目标形状为幂函数的3种参数下的PID控制效果 |
由图可知, case3的控制效果最好, 图 9为此组参数下8个测量点处的控制输出信号和控制电压, 由图 9即可看出同组参数对8个点的控制效果相同。

|
| 图 9 目标形状为幂函数的8个测量点控制效果 |
控制过程与前一种情况相同, 只是改变了目标函数。给定预定目标形状函数为

|
| 图 10 目标形状为三角函数的3种参数PID控制效果 |
1) 根据薄壁结构层合理论, 建立了压电智能结构机电耦合静力学和动力学模型, 采用最小二乘方法, 实现对压电智能薄壁结构的形状控制, 达到预定目标形状。
2) 引入PID控制策略, 运用现代控制理论, 以位移为系统的输入量, 实现对压电智能薄壁结构在加入电压后由于惯性力引起的振动的抑制, 使其能快速稳定在预定目标形状, 即控制其实现形状控制。
| [1] |
裘进浩, 边义祥, 季宏丽, 等.
智能材料结构在航空领域中的应用[J]. 航空制造技术, 2009 (3): 26–29.
Qiu Jinhao, Bian Yixiang, Ji Hongli, et al. Application of Smart Materials and Structures in Aviation Industry[J]. Aeronautical Manufacturing Technology, 2009(3): 26–29. (in Chinese) |
| [2] | Koconis D B, Kollar L P, Springer G S. Shape Control of Composite Plates and Shells with Embedded Actuators I:Voltage Specified[J]. Journal of Composite Materials, 1994, 28(5): 415–458. DOI:10.1177/002199839402800503 |
| [3] | Chee C, Tong L, Steven G P. Static Shape Control of Composite Plates Using a Curvature-Displacement Based Algorithm[J]. International Journal of Solids and Structures, 2001, 38: 6381–6403. DOI:10.1016/S0020-7683(01)00049-X |
| [4] | Nyugen Q, Tong L. Shape Control of Smart Composite Plate with Non-Rectangular Piezoelectric Actuators[J]. Composite Structures, 2004, 66: 207–214. DOI:10.1016/j.compstruct.2004.04.039 |
| [5] |
王剑, 赵国忠, 刘宝山.
压电曲壳单元及其形状控制[J]. 工程力学, 2008, 25 (4): 224–229.
Wang Jian, Zhao Guozhong, Liu Baoshan. Shape Control of Piezoelectric Shell Structures[J]. Engineering Mechanics, 2008, 25(4): 224–229. (in Chinese) |
| [6] |
姚林泉, 丁睿.
非线性压电效应下压电层合板的弯曲[J]. 应用力学学报, 2005, 22 (1): 107–110.
Yao Linquan, Ding Rui. Bending of Piezoelectric Laminated Plate Considering Nonlinear Piezoelectric Effect[J]. Chinese Journal of Applied Mechanics, 2005, 22(1): 107–110. (in Chinese) |
| [7] | Liu G R, Dai K Y, Lim K M. Static and Vibration Control of Composite Laminates Integrated with Piezoelectric Sensors and Actuators Using the Radial Point Interpolation Method[J]. Smart Materials & Structures, 2004, 13(6): 1438–1447. |
| [8] | Kang Y K, Park H C, Kim J, et al. Interaction of Active and Passive Vibration Control of Laminated Composite Beams with Piezoelectric Sensors/Actuators[J]. Materials & Design, 2002, 23: 277–286. |
| [9] | Narayanan S, Balamurugan V. Finite Element Modeling of Piezolaminated Smart Structures for Active Vibration Control with Distributed Sensors and Actuators[J]. Journal of Sound and Vibration, 2003, 262(3): 529–562. DOI:10.1016/S0022-460X(03)00110-X |
| [10] | Valliappan S, Qi K. Finite Element Analysis of a ‘Smart’ Damper for Seismic Structural Control[J]. Computers & Structures, 2003, 81(8/9/10/11): 1009–1017. |
| [11] | Kulkarni S A, Bajoria K M. Finite Element Modeling of Smart Plates/Shells Using Higher Order Shear Deformation Theory[J]. Composite Structures, 2003, 62(1): 41–50. DOI:10.1016/S0263-8223(03)00082-5 |
| [12] |
季宏丽, 裘进浩, 赵永春, 等.
基于TMS320F2812的悬臂梁振动半主动控制[J]. 光学精密工程, 2009, 17 (1): 126–131.
Ji Hongli, Qiu Jinhao, Zhao Yongchun, et al. Semi-Active Control for Structural Vibration of Cantilever Beam Based on TMS320F2812[J]. Optics and Precision Engineering, 2009, 17(1): 126–131. (in Chinese) |
| [13] | Zhang S Q, Li H N, Schmidt R, et al. Disturbance Rejection Control for Vibration Suppression of Piezoelectric Laminated Thin Walled Structures[J]. Journal of Sound and Vibration, 2014, 333(5): 1209–1223. DOI:10.1016/j.jsv.2013.10.024 |
| [14] | Zhang S Q, Schmidt R. Static and Dynamic FE Analysis of Piezoelectric Integrated Thin-Walled Composite Structures with Large Rotations[J]. Composite Structures, 2014, 112: 345–357. DOI:10.1016/j.compstruct.2014.02.029 |
| [15] | Zhang S Q, Schmidt R, Qin X S. Active Vibration Control of Piezoelectric Bonded Smart Structures Using PID Algorithm[J]. Chinese Journal of Aeronautics, 2015, 28(1): 305–313. DOI:10.1016/j.cja.2014.12.005 |
2. State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology, Dalian 116024, China
