

2. 空军航空大学 飞行器与动力系, 吉林 长春 130022
传统的无人机设计以性能设计为主, 可靠性设计作为辅助工作, 2种设计相对独立, 通常性能设计中可靠性要求只作为一种约束, 而可靠性设计中还不能充分体现性能设计。将性能设计和可靠性设计分开执行, 很难得到性能指标和可靠性指标的最优搭配, 失去了整体最优性, 制约了无人机研发技术的进步。
另外, 在传统的设计流程下, 为了使设计结果同时满足性能和可靠性要求, 设计过程迭代次数较多。无人机从研制到真正应用到国防, 各国都需要8年左右时间, 例如, 英国BAE系统公司的雷神, 2006年开始研发, 2014年成功完成首次试飞; 美国波音公司的X-45, 1997年开始研制, 2005年完成相关技术测试; 欧洲达索公司的神经元, 2004年启动项目, 2012年试飞成功。当前, 各国争先研究无人机先进技术, 积极研制“杀手锏”武器, 在这种紧迫局势下, 如果能有效缩短无人机的设计周期, 早日生产出具有强大威慑力的无人机, 对我国国防建设将是极大贡献。
无人机等复杂系统设计中, 客观存在许多不确定性, 如信息不确定性、决策不确定性和建模仿真不确定性等, 以往由于数学处理和计算速度等方面的原因, 通常将不确定量作为确定量处理, 这使无人机的设计存在不可靠、不稳健的隐患。在实际工程中, 实现无人机的可靠性与性能一体化设计, 必须考虑不确定性的影响, 研究基于不确定性的一体化设计优化方法。
1 可靠性与性能一体化设计思想考虑到无人机设计涉及寿命全周期的各个系统学科的各种设计方法, 使用可靠性与性能一体化设计的三维空间设计思想[1], 如图 1所示。

|
| 图 1 可靠性与性能一体化设计的研究领域示意图 |
周期轴 (水平轴——X轴) 描述产品全生命周期内各阶段的一体化。它表明产品的生命周期是设计过程须考虑的主线。可靠性与性能一体化的内容应该包括产品、装备、系统生命周期的全部阶段, 如设计、制造、销售、使用、维修、回收等。
抽象轴 (垂直轴——Y轴) 描述产品设计中的设计方法的一体化。设计方法有很多, 例如多学科设计优化方法、稳健设计方法、可靠性设计方法、不确定性设计方法等。近年来出现了一些设计方法的集成, 例如, 可靠性协同优化方法、基于不确定性的稳健优化方法等。
学科轴 (第三轴——Z轴) 展示需要进行一体化研究的多种学科。该轴中各种学科的一体化设计可以看作是通常意义上的多学科设计优化。这些学科技术主要包括机械、结构、气动、光学、力学、动力学、控制、可靠性、维修性、保障性、安全性、测试性等与无人机设计相关的专业学科。
为了使可靠性设计与性能设计在三维设计空间中相互融合, 首先需要解决使用性能参数描述可靠性指标的问题, 然后基于多学科设计优化实现可靠性与性能的一体化设计, 最后考虑一体化设计中的不确定性问题。
2 可靠性的性能参数表示方法研究提取可靠性指标, 构建可靠性函数, 是可靠性设计的关键步骤, 实际上是可靠性量化的过程。可靠性量化形式多种多样, 例如可靠度、寿命、平均无故障工作时间及其数学变换等。无人机在不同阶段, 根据功能、环境的不同, 注重的可靠性也不同, 例如, 在贮存期, 需要检测剩余寿命; 发射后, 注重的是系统各零部件的使用可靠性, 以保证飞行任务的完成。因此, 无人机设计的可靠性指标繁多、形式不统一, 难以使用统一的模式表述可靠性函数, 这是可靠性与性能一体化设计的一个难点。
在可靠性分析领域, 引入最大可能点 (MPP) 概念的一阶可靠性方法 (FORM) 和二阶可靠性方法 (SORM)[2]通过一系列转换, 间接地使用性能参数建立了可靠性函数, 但寻优过程增加了计算量, 尤其在变量维数较高的情况下, 计算效率会下降, 误差比较大[3]。
借鉴结构可靠性的“应力-强度干涉”理论, 本文作者将其含义扩展, 给出了代表性能参数的“应力”、“强度”分布的描述方法, 应用该理论推导出多变量情况下可靠性的计算公式, 并讨论了可靠性置信限的计算问题。
3 可靠性与性能一体化设计的实现途径将可靠性函数使用性能参数描述后, 期望可以将可靠性与性能一体化设计转变为性能设计, 这需要明确可靠性设计与性能设计之间的转换关系和过程。
目前, 为了缩短设计周期, 无人机的设计方法正从串行设计模式向并行设计模式转化, 并行设计模式典型的代表是多学科设计优化。众多的多学科设计优化方法中, 较为实用的是协同优化 (CO) 算法。基于学科并行分析的思想, CO采用学科并行优化, 即学科不仅承担分析的任务, 还要进行优化, 它将工程系统的优化设计问题分为两级:一个系统级和并行的多个学科级。实现可靠性与性能一体化设计的关键在于如何在系统级和学科级, 将可靠性函数和指标融入到性能分析和优化中。
将可靠性函数和指标作为条件约束函数引入系统级和学科级的优化器中, 如图 2所示。

|
| 图 2 基于可靠性的CO算法原理图 |
系统优化器中, f(·) 为优化目标函数, ci(·) 为约束函数, 也是学科级的目标函数, tR是学科设计向量xi、yi的函数, i=1, 2, …, N, R0为系统可靠性指标, 可以通过分析无人机的生存可靠性、拦截可靠性、正常飞行可靠性、损伤可靠性等来获得。学科级优化器中, gi(·) 为约束函数, tRi是学科i设计向量xi、yi的函数, Ri0为系统通过可靠性指标分配模块分配给子系统的可靠性指标。
可靠性指标分配模块的作用是可靠性分配, 运用层次分析法, 综合考虑各学科的复杂度、重要度、耦合度等, 将系统可靠性指标合理分配到学科级, 并根据各学科可靠度冗余情况, 调整可靠性指标分配判断矩阵, 使系统可靠性指标得到最优分配。另外, 也可对学科级可靠性指标再次分配, 具体到学科级中的任务可靠性、结构可靠性等。
可靠性函数建模模块以学科分析子模块为模型基础, 通过应力-强度干涉理论建立可靠性函数与性能参数的关系式, 为学科级优化系统提供由性能参数表示的可靠性参数, 作为优化的约束条件, 实现可靠性与性能一体化。
应力、强度分析模块明确性能参数属于应力 (s) 还是强度 (l), 对于某些参数, 根据其物理意义就可以分析它的变化是否有益于可靠性的提高, 但多数参数与可靠性的关系复杂, 需要专门的应力、强度分析模块来评估。
各学科的可靠性约束函数不仅与本学科性能参数有关, 还可能涉及到其他学科的参数, 这就增加了学科间耦合关系的复杂度, 为CO算法的计算增加了难度。
4 基于不确定性的可靠性与性能一体化设计优化方法基于不确定性的无人机可靠性与性能一体化设计, 需要研究系统中不确定性因素在优化模型中的表达方式。按优化模型的组成, 可以将不确定性粗略地分为性能参数不确定性和可靠性参数不确定性, 虽然两种不确定性来源相同, 但在优化模型中表现方式不同, 需要分别研究。
4.1 性能参数不确定性分析国内外分析不确定性对多学科系统的影响, 是将传统的灵敏度分析方法应用在多学科系统中[4-5], 该类方法需要获得精确的参数和模型不确定性量值。
目前, 针对单学科或某一无相关性问题的系统, 不确定性分析方法众多, 例如, Bootstrap方法和Bayes方法在不确定性分析中, 对于系统观测信息不完全或信息量较少的情况, 运用抽样方法估计总体样本的统计特性[6], 且使用MCS方法代替灵敏度分析来获得系统输出信息, 计算简便, 适用范围广, 对仿真模型的约束条件少; 拉丁超立方抽样 (LHS) 方法[7]是一种用于加速方差收敛的方法, 样本更加精确地反应了输入概率函数中值的分布, 最大优点是要对真实情况进行精确的模拟所要采取的抽样规模较小, 从而相对减少所花费的分析计算时间; 不确定性凸集合理论[8]只需要用适当的凸集合来界定参数变差的范围, 并在凸集内分析结构功能函数不确定性的“最差情形”, 当可掌握的参数分布信息不足时, 凸集模型提供了一种简洁有效的不确定分析新途径, 可以作为概率方法的有益补充。
与单学科的不确定性分析相比, 多学科的不确定性分析需要考虑学科间的耦合关系, 且整体系统复杂庞大, 如何将已有的单学科不确定性分析方法引入到多学科系统中, 需要大量研究工作。
4.2 可靠性参数不确定性分析不确定性对可靠性参数的影响通常表现为各可靠性函数、指标的均值和置信限的变化, 由于可靠性设计涉及了概率统计、空间转换等复杂数学计算, 可靠性参数不确定性分析方法不同于性能参数不确定性分析方法。从目前广泛使用的可靠性分析方法——抽样方法和矩方法出发, 针对可靠度的一般表达方式, 可以分别使用敏感性分析、响应面近似或梯度向量等数学手段, 分析可靠性参数的分布参数不确定性, 计算可靠度置信限[9-10]。
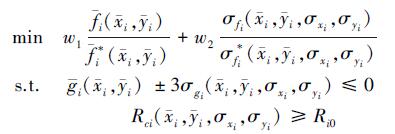
4.3 基于不确定性的可靠性与性能一体化设计基于不确定性的可靠性与性能一体化的优化模型为
|
式中, w1和w2为加权系数, 上标“-”为平均值, σ为标准差, 




与基于可靠性的CO算法相比, 基于不确定性的可靠性与性能一体化的CO算法增加了可靠性和性能不确定性分析, 学科级优化器的优化目标函数和约束函数引入了表现不确定性的函数均值和标准差。
5 仿真实例外形正常分布的某无人机, 对结构、气动、隐身、控制4个学科进行一体化设计, 其优化目标分别是是起飞质量最小、升阻比最大、雷达散射截面积最小、平飞高度冲出量最小。设计变量如表 1所示。
| 学科 | 设计变量/单位 | 物理意义 | 初值 | 范围 | CO | (基于不确定性 的CO) |
| 结构 | Is/(Ns·kg-1) | 主发动机比冲 | 2 000 | [1 000, 4 000] | 2 351.196 | 2 351.341 |
| t0/s | 助推器工作时间 | 3 | [1, 5] | 2.085 3 | 2.007 7 | |
| P0/(N·m-2) | 翼载 | 2 000 | [1 000, 5 000] | 1 000.389 | 1 000.654 | |
| Fcp | 助推器平均相对推力 | 16 | [10, 20] | 12.158 4 | 12.010 0 | |
| t1/s | 发动机换级时间 | 35 | [8, 50] | 25.582 7 | 25.458 2 | |
| t2/s | 发动机二级工作结束时间 | 120 | [90, 400] | 264.491 | 222.136 | |
| P1 | 一级相对推力 | 1 | [0.1, 5] | 4.9451 | 4.885 2 | |
| P2 | 二级相对推力 | 0.5 | [0.1, 4] | 1.223 5 | 1.384 3 | |
| 气动 | Sw/m2 | 机翼面积 | 2 | [0.1, 10] | 0.405 3 | 0.394 9 |
| λw | 机翼展弦比 | 2 | [0.1, 5] | 1.688 5 | 1.676 8 | |
| cW | 机翼相对厚度 | 0.08 | [0.000 1, 0.12] | 0.003 903 | 0.030 752 | |
| lR | 尾翼翼展 | 1.7 | [0.5, 5] | 0.992 15 | 1.021 11 | |
| 隐身 | Ln/m | 机身头部长度 | 1.2 | [1, 5] | 2.553 5 | 2.553 5 |
| DB/m | 机身直径 | 1.5 | [1, 2] | 1.594 744 | 1.451 257 | |
| LB/m | 机身长度 | 8 | [3, 10] | 7.973 719 | 7.591 611 | |
| DS/m | 机尾直径 | 0.4 | [0.4, 1] | 0.637 898 | 0.794 229 | |
| 控制 | k2 | 阻尼陀螺的放大系数 | 0.3 | [0.000 1, 1] | 0.072 578 | 0.072 579 |
| k5 | 高度偏差积分机构的控制系数 | 0.5 | [0.000 1, 1] | 0.579 172 | 0.579 180 |
约束条件包括最大轴向过载、助推器工作时间、外形参数相互关系等。系统可靠性指标R0为飞行可靠度, 取0.70。根据各学科对飞行可靠性的重要度, 学科的复杂程度等, 使用层次分析法, 可得结构、气动、控制学科的可靠性指标分别为0.87、0.85、0.95。隐身学科可靠性主要反映突防概率, 本例中忽略其对飞行可靠性的作用。设计变量分布参数具有随机不确定性, 标准差为均值的0.05倍, 模型参数上, 耦合变量分布参数具有随机不确定性, 标准差为均值的0.1倍。性能不确定性分析使用效率较高的Bayes方法, 可靠度下限计算使用双环一阶可靠性方法, 表 1为优化结果。
隐身学科要求尾部收缩比ηS=DS/DB取值范围为0.4~1。使用CO方法设计得到的尾部收缩比ηS=DS/DB=0.4, 当Ds减小或DB增大, 约束条件就无法满足了。而使用基于性能参数不确定性和可靠性参数不确定性的CO方法, 可得ηS=DS/DB=0.547, 当Ds减小了3σDs, 即3×0.05Ds, DB增加了3σDB, 即3×0.05DB, 则ηS=DS/DB=0.404 5, 仍满足约束要求, 设计结果有效。
以结构可靠性为例, 使用基于不确定性的CO方法, 得到可靠度为0.957 4, 即使受到设计变量和耦合变量不确定性的影响, 可靠度下限为0.893 9, 仍然大于要求的0.87。
可见, 在性能优化过程中结合可靠性设计, 实现了可靠性与性能一体化设计, 避免了性能设计和可靠性设计交替进行而浪费时间和计算效率。另外, 为了提高和量化系统可靠性, 有必要在优化设计模型中考虑不确定性对性能和可靠性函数的作用。
6 结论无人机的可靠性与性能一体化设计既是复杂的理论方法研究, 也是庞大的工程实践, 本文对一体化设计的实现途径和方法进行了大胆尝试和研究, 得到了可行方案, 但是需要考虑的因素众多, 还有很多工作要进一步研究, 例如无人机整个寿命周期的动态可靠性公式推导, 难度较大; 量化决策不确定性, 并引入到多学科优化中; 将传统概率统计方法与模糊理论、灰色理论相结合描述和处理可靠性及其不确定性问题; 无人机的优化设计中, 应集成有效的软件, 这对学科模型、公式的推导提出更高要求。
| [1] |
夏青, 钱山, 张士峰, 蔡洪.
航天器可靠性与性能一体化设计初步研究[J]. 弹箭与制导学报, 2009, 29 (1): 257–260.
Xia Qing, Qian Shan, Zhang Shifeng, Cai Hong. Primary Study of Reliability and Performance Incorporate Design of Aerocraft[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2009, 29(1): 257–260. (in Chinese) |
| [2] | Peyman Honarmandi, Jean W. Zu, Kamran Behdinan. Reliability Based Design Optimization of Cantilever Beams under Fatigue Constraint[C]//47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Con, 2006 |
| [3] |
刘德顺, 岳文辉, 杜小平.
不确定性分析与稳健设计的研究进展[J]. 中国机械工程, 2006, 17 (17): 1834–1841.
iu Deshun, Yue Wenhui, Du Xiaoping. Study on Uncertainty Analysis and Robust Design:A Review[J]. China Mechanical Engineering, 2006, 17(17): 1834–1841. (in Chinese) |
| [4] | Du X, Chen W. An Efficient Approach to Probabilistic Uncertainty Analysis in Simulation-Based Multidisciplinary Design[C]//38th Aerospace Sciences Meeting & Exhibit, 2000 |
| [5] | Du X, Chen W. Concurrent Subsystem Uncertainty Analysis in Multidisciplinary Design[C]//8th AIAA/NASA/USAF/ISSMO Symposium on Multidisciplinary Analysis and Optimization, 2000 |
| [6] | Enrico Zio. A Study of the Bootstrap Method for Estimating the Accuracy of Artificial Neural Networks in Predicting Nuclear Transient Processes[J]. IEEE Trans on Nuclear Science, 2006, 53(3): 1460–1478. DOI:10.1109/TNS.2006.871662 |
| [7] | Wang Dapeng. Collaboration Pursuing Method Using Latin Hypercube Sampling[C]//47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Con, 2006 |
| [8] | Ramu Palaniappan, Samy Missoum, Raphael T Haftka. A Convex Hull Approach for the Reliability-Based Design Optimization of Transient Dynamic Problems[C]//10th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, 2004 |
| [9] | Liu Huibin, Chen Wei. Probabilistic Sensitivity Analysis Methods for Design under Uncertainty[C]//10th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, 2004 |
| [10] | Agarwal Harish, Renaud John E. Reliability Based Design Optimization for Multidisciplinary Systems Using Response Surfaces[C]//43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Con, 2002 |
2. Department of Aviation Mechanical Engineering, Air Force Aviation University, Changchun 130022, China
