

再入滑翔飞行器具有飞行速度高、机动能力强等诸多优点, 是突破敌方反导防御系统的利器。但其由于飞行时间长, 飞行环境复杂多变, 系统动力学特性呈现出强非线性、强耦合、快时变的特点, 而时变的外部不确定性干扰, 进一步增加了控制系统设计的难度[1-3]。
针对不确定非线性系统的控制问题, 传统的鲁棒控制律过于保守, 而滑模控制律则仅对系统匹配不确定干扰具有鲁棒性:通过干扰观测器技术对外部扰动进行前馈补偿,有利于降低控制系统增益,获得更好的快速性和跟踪性能,控制指令也更为平滑,因此, 基于干扰观测器的控制系统设计成为主要方法, 如滑模干扰观测器等[4-6], 但非匹配不确定系统的控制一直是设计难点。文献[7]则首次针对非匹配不确定项设计了一种有效的非线性干扰观测器(nonlinear disturbance observer, NDO)及相应滑模控制方法。该方法一经提出便引起了学者们的广泛关注, 并与多种非线性控制方法相结合, 如自适应反演控制、动态逆控制、自适应滑模控制等[8-10]。传统的非线性干扰观测器均假设干扰变化缓慢, 或干扰变化速率近似为零, 但对于再入滑翔飞行器而言, 外部干扰通常为快时变的, 因此, NDO方法的应用具有极大的限制。文献[11]则在传统NDO的基础上, 设计了一种能够同时观测外部干扰及其变化速率的线性干扰观测器, 并对文献[7]中的滑模面进行了改进,但并不适用于非线性系统。
本文即在文献[11]的基础上, 首先基于Lyapunov稳定性定理重新设计了一种扩张状态的非线性干扰观测器, 能够同时观测干扰大小及其变化速率。以具有二阶不确定性干扰的再入滑翔飞行器为研究对象,根据奇异摄动理论,将系统运动方程分为姿态角外回路和姿态角速率内回路, 设计了新型滑模面及双回路非奇异终端滑模控制律, 能够基于干扰观测数据对外部扰动进行补偿,并保证控制系统跟踪误差在有限时间内收敛至零。最后,通过仿真对比验证了该方法的有效性。
1 问题描述以面对称的再入滑翔飞行器为研究对象, 忽略地球自转的影响, 系统姿态运动学和动力学方程可表示为

|
(1) |
式中, α、β和γv分别为飞行器攻角、侧滑角和倾侧角; ωx、ωy和ωz为滚转、偏航和俯仰角速率; θ为弹道倾角; m和V分别为飞行器质量和飞行速度; Jx、Jy、Jz和Jxy为飞行器惯性积; Y和
|
(2) |
式中, q为动压, S和L分别为参考长度和参考面积; δx、δy和δz为飞行器三通道等效舵偏。
根据奇异摄动理论, 飞行器六自由度运动模型(1)可描述为快回路和慢回路

|
(3) |
式中, x1=[α β γv]T为慢回路状态向量, x2c为慢回路虚拟控制向量, 并作为快回路状态跟踪指令向量; x2=[ωx ωy ωz]T为快回路状态向量; u=[δx δy δz]T为快回路控制向量; d1和d2为外部不确定干扰向量。
假设1 不确定向量满足条件:‖d1‖ < ε1, ‖
本文即针对上述含有时变不确定干扰的非线性系统, 设计一种新型扩张干扰观测器同时观测干扰大小和变化速率, 并基于此进行有限时间收敛的非奇异终端滑模控制系统设计, 以提高系统抗扰动能力。
2 非线性扩张干扰观测器设计系统(3)中的双回路子系统可统一表示成含有时变不确定性的多输入多输出系统

|
(4) |
针对上述系统的控制方法通常包括2种:①基于不确定性上下界的鲁棒控制律, 但参数过于保守, 且动态特性难以保证; ②基于干扰观测器的控制方法。传统的非线性干扰观测器结构简单, 运算量小, 但均假设干扰变化速率近似为零, 因此, 对于快时变不确定性的估计精度有限[6]。
文献[12]对传统非线性干扰观测器进行了改进, 放宽了对干扰变化速率的限值, 在干扰变化速率存在未知上界的条件下能够保证观测误差有界收敛, 但无法精确估计干扰变化速率, 且保守性较强。本文在此基础上, 结合文献[11]中的线性扩张干扰观测器, 进一步设计了一种非线性的扩张干扰观测器
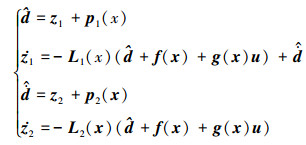
|
(5) |
式中, 

定理1 对于含有时变不确定性的多输入多输出系统(4), 假设
证明 首先定义观测误差向量如下

|
(6) |
对干扰观测误差向量
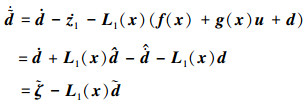
|
(7) |
同理, 对干扰变化速率观测误差
|
(8) |
设观测误差向量
|
(9) |
式中
|
(10) |
对于任意给定的对称正定矩阵Q, 总能找到一个对称正定矩阵P, 使得
|
(11) |
取Lyapunov函数V=eTPe, 对其求导可得
|
(12) |
式中, λm为矩阵Q的最小特征值。
因此, 由λm‖e‖-2‖PH‖μ=0可知, 观测误差向量e的范数将渐进收敛于
|
(13) |
将再入滑翔飞行器六自由度模型分为姿态角外回路和姿态角速率内回路, 分别设计基于本文干扰观测器的非奇异终端滑模控制律, 首先给出如下引理[13]:
引理1 如果存在一个连续的正定函数V(t)满足如下不等式

|
(14) |
则V(t)将在有限时间内收敛至系统平衡点, 且收敛时间ts满足

|
(15) |
式中:α>0, λ>0, 0 < γ < 1。
3.1 慢回路非奇异终端滑模控制律设计针对再入飞行器运动模型(3)中的姿态角慢回路, 首先在文献[7]的基础上, 设计一种新型滑模面如下
|
(16) |
式中:x1c为慢回路状态指令向量; 
对(16)式取微分可得
|
(17) |
定理2 对于含有时变不确定向量的慢回路系统方程(3), 如果采用如下所示虚拟控制量

|
(18) |
式中, 
证明:设计Lyapunov函数如下
|
(19) |
对V1取微分可得
|
(20) |
由(20)式和引理1可知, 慢回路系统状态指令跟踪误差将在有限时间内到达滑模面, 并渐进趋于零。
慢回路虚拟控制量x2c经过滤波环节后, 作为姿态角速率快回路的状态跟踪指令向量。
3.2 快回路非奇异终端滑模控制律设计针对再入飞行器运动模型(3)中的快回路方程, 与(16)式类似, 滑模面可设计为
|
(21) |
式中, x2c为慢回路虚拟控制量,
对(21)式取微分可得
|
(22) |
定理3 对于含有时变不确定向量的快回路系统方程(3), 如果采用如下所示控制律

|
(23) |
式中, 
证明:设计Lyapunov函数如下

|
(24) |
对V2取微分可得
|
(25) |
由(25)式和引理1可知, 快回路系统状态指令跟踪误差同样将在有限时间内到达滑模面, 并渐进收敛至零。
4 仿真分析以某型再入滑翔飞行器为算例, 对本文提出的非线性扩张干扰观测器及双回路非奇异终端滑模控制方法进行仿真分析。飞行器高度为60 km, 飞行马赫数20, 系统状态初值设为
|
外回路中, 攻角、侧滑角、倾侧角通道的非匹配不确定干扰分别设置为
|
扩张的非线性干扰观测器函数向量取为

|
对应的观测器增益矩阵为

|
此外, 将滑模控制律中的符号函数sign(σ)替换为sigmoid函数, 以降低系统抖振[14]

|
(26) |
式中, 本文取τ=50。
在Matlab/Simulink仿真环境下, 对基于传统非线性干扰观测器的滑模控制方法(NDO-SMC)和本文基于扩张非线性干扰观测器的双回路非奇异终端滑模控制方法(ENDO-SMC)进行对比, 结果如图 1~图 7所示。

|
| 图 1 三通道干扰观测曲线 |

|
| 图 2 攻角指令跟踪曲线 |

|
| 图 3 侧滑角指令跟踪曲线 |

|
| 图 4 倾侧角指令跟踪曲线 |

|
| 图 5 俯仰通道等效舵偏角 |

|
| 图 6 偏航通道等效舵偏角 |

|
| 图 7 滚转通道等效舵偏角 |
图 1所示为俯仰、偏航、以及滚转通道中干扰观测结果对比, 分析可知, 2种非线性干扰观测器均能够较为准确的观测未知扰动, 但本文的ENDO方法能够将传统NDO的观测精度提高约4%, 有利于改善控制系统效果。
图 2至图 7所示为攻角、侧滑角、倾侧角指令跟踪曲线, 以及三通道等效舵偏仿真结果对比, 可见, 本文的ENDO-SMC方法能够有效提高系统控制精度, 其中攻角跟踪误差最大降低50%, 侧滑角跟踪误差最大降低80%, 等效舵偏角指令也较传统NDO-SMC方法更为平滑, 高频抖振明显减弱。
5 结论再入滑翔飞行器飞行速度高、飞行环境复杂多变、参数变化剧烈, 系统存在较强的时变不确定性干扰, 而传统的非线性干扰观测器均假设外部扰动变化缓慢或变化速率近似为零, 限制了在再入滑翔飞行器上的应用。针对该问题, 本文首先设计了一种扩张状态的非线性干扰观测器, 可同时观测干扰大小及其变化速率。在此基础上, 设计了一种具有干扰补偿作用的新型滑模面, 以及双回路非奇异终端滑模控制律, 有效解决了具有时变非匹配不确定性干扰的系统控制问题。以再入滑翔飞行器为算例的仿真结果表明, 该方法能够有效提高系统控制精度, 控制指令更为平滑。
| [1] |
李菁菁, 任章, 宋剑爽.
高超声速再入滑翔飞行器的模糊变结构控制[J]. 上海交通大学学报 , 2011, 45 (2) : 295–300.
Li Jingjing, Ren Zhang, Song Jianshuang. Fuzzy Sliding Mode Control for Hypersonic Re-Entry Vehicles[J]. Journal of Shanghai Jiaotong University , 2011, 45 (2) : 295–300. |
| [2] | Xu H, Mirmirani M D, Ioannou P A. Adaptive Sliding Mode Control Design for a Hypersonic Flight Vehicle[J]. Journal of Guidance, Control, and Dynamics , 2004, 27 (5) : 829–838. DOI:10.2514/1.12596 |
| [3] | Lian B H, Bang H, Hurtado J E. Adaptive Backstepping Control Based Autopilot Design for Reentry Vehicle[C]//Proc AIAA Guidance Navigation and Control Conf and Exhibit, 2004, 1210 |
| [4] | Hall C E, Shtessel Y B. Sliding Mode Disturbance Observer-Based Control for a Reusable Launch Vehicle[J]. Journal of Guidance, Control, and Dynamics , 2006, 29 (6) : 1315–1328. DOI:10.2514/1.20151 |
| [5] | Koosun Lee, Juhoon Back, Ick Choy. Nonlinear Disturbance Observer Based Robust Attitude Tracking Controller for Quadrotor UAVs[J]. International Journal of Control Automation and Systems , 2014, 12 (6) : 1266–1275. DOI:10.1007/s12555-014-0145-x |
| [6] | Yang Jun. Nonlinear Disturbance Observer Based Robust Flight Control for Airbreathing Hypersonic Vehicles[J]. IEEE Trans on Aerospace and Electronics Systems , 2013, 49 (2) : 1263–1275. DOI:10.1109/TAES.2013.6494412 |
| [7] | Yang Jun, Li Shihua, Yu Xinghuo. Sliding-Mode Control for Systems with Mismatched Uncertainties via A Disturbance Observer[J]. IEEE Trans on Industrial Electronics , 2013, 60 (1) : 160–169. DOI:10.1109/TIE.2012.2183841 |
| [8] |
卜祥伟, 吴晓燕, 陈永兴, 等.
非线性干扰观测器的高超声速飞行器自适应反演控制[J]. 国防科技大学学报 , 2014, 36 (5) : 44–49.
Bu Xiangwei, Wu Xiaoyan, Chen Yongxing, et al. Adaptive Backstepping Control of Hypersonic Vehicles Based on Nonlinear Disturbance Observer[J]. Journal of National University of Defense Technology , 2014, 36 (5) : 44–49. |
| [9] |
郭超, 梁晓庚, 王俊伟.
基于非线性干扰观测器的拦截弹动态逆控制[J]. 系统工程与电子技术 , 2014, 36 (11) : 2259–2265.
Guo Chao, Liang Xiaogeng, Wang Junwei. Nonlinear Disturbance Observer-Based Dynamic Inverse Control for Near Space Interceptor[J]. System Engineering and Electronics , 2014, 36 (11) : 2259–2265. |
| [10] |
于靖, 陈谋, 姜长生.
基于干扰观测器的非线性不确定系统自适应滑模控制[J]. 控制理论与应用 , 2014, 31 (8) : 993–999.
Yu Jing, Chen Mou, Jiang Changsheng. Adaptive Sliding Mode Control for Nonlinear Uncertain Systems Based on Disturbance Observer[J]. Control Theory & Applications , 2014, 31 (8) : 993–999. |
| [11] | Ginoya Divyesh, Shendge P D, Phadke S B. Sliding Mode Control for Mismatched Uncertain Systems Using an Extended Disturbance Observer[J]. IEEE Trans on Industrial Electronics , 2014, 61 (4) : 1983–1992. DOI:10.1109/TIE.2013.2271597 |
| [12] |
蒲明, 吴庆宪, 姜长生, 等.
新型快速Terminal滑模及其在近空间飞行器上的应用[J]. 航空学报 , 2011, 32 (7) : 1283–1291.
Pu Ming, Wu Qingxian, Jiang Changsheng, et al. New Fast Terminal Sliding Mode and Its Application to Near Space Vehicles[J]. Acta Aeronautica et Astronautica Sinica , 2011, 32 (7) : 1283–1291. |
| [13] | Yu Shuanghe. Continuous Finite-Time Control for Robotic Manipulators with Terminal Sliding Mode[J]. Automatica , 2005, 41 : 1957–1964. DOI:10.1016/j.automatica.2005.07.001 |
| [14] | Cybenko G. Approximation by Superpositions of a Sigmoidal Function[J]. Mathematics of Control, Singnals and Systems , 1989, 2 (4) : 303–314. DOI:10.1007/BF02551274 |
