

现代战争要求格斗型空空导弹具备强机动性、先敌发射和全向攻击能力,这就要求导引头离轴角和视场大、体积小、质量轻[1-4]。滚仰式导引头的稳定平台采用滚转外框架、俯仰内框架的万向支架结构,视场可以覆盖整个前向半球,为导弹实现大离轴角发射提供了必要的条件,因此成为了新一代格斗型空空导弹的理想选择。滚仰式导引头的典型代表为美国研制的AIM-9X、英国研制的ASRAAM和德国研制的IRIS-T[5-6]。俯仰偏航式导引头的框架运动为直角坐标形式,其相关理论比较成熟[7];而滚仰式导引头的框架运动形式为极坐标形式,与俯仰偏航式导引头存在本质的区别,因此研究滚仰式导引头及其应用就显得极其重要。
1 滚仰式导引头与俯仰偏航式导引头关系滚仰式导引头和俯仰偏航式导引头坐标系之间的关系如图 1所示。

|
| 图 1 俯仰偏航式导引头和滚仰式导引头坐标系关系示意图 |
OXIYIZI为惯性坐标系, OXMYMZM为弹体坐标系, OXYYYZY为俯仰偏航式导引头光轴坐标系, OXRYRZR为滚仰式导引头光轴坐标系[8]。
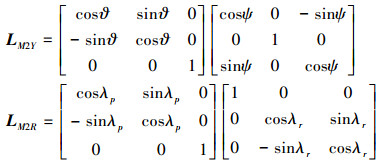
当目标相对于导弹在空间运动时, 俯仰偏航式导引头和滚仰式导引头都可以通过旋转自身框架使导引头光轴指向目标。假定初始状态下导引头光轴坐标系与弹体坐标系重合, 则俯仰偏航式导引头先以角速度


|
(1) |
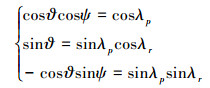
由于指向同一目标, 因此LM2Y与LM2R的第一行元素对应相等, 即
|
(2) |
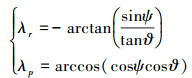
求解(2)式)得(ψ, ϑ)与(λr, λp)关系如下
|
(3) |
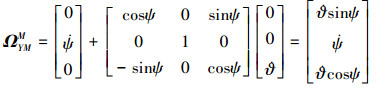
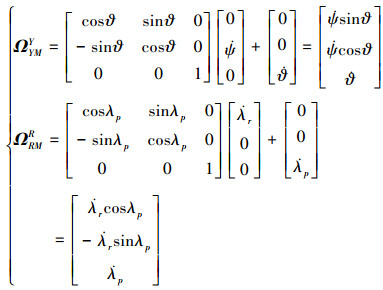
在指向目标的过程中, 俯仰偏航式导引头光轴坐标系相对于弹体坐标系的旋转角速度在弹体坐标系上的投影表示为
|
(4) |
而滚仰式导引头光轴坐标系相对于弹体坐标系的旋转角速度在弹体坐标系上的投影为
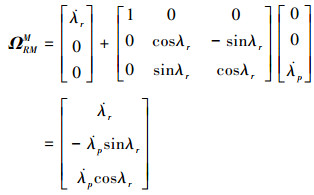
|
(5) |
由(3)式、(4)式和(5)式可知ΩYMM≠ΩRMM, 即当指向同一个目标时俯仰偏航式导引头光轴角速度和滚仰式导引头光轴角速度不相等。
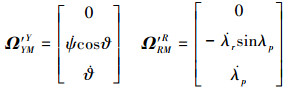
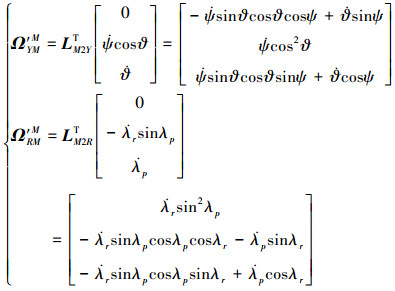
为了解释以上现象, 将俯仰偏航式导引头光轴坐标系与滚仰式导引头光轴坐标系相对弹体坐标系的旋转角速度分别投影到各自的光轴坐标系上, 由此可以得到两种导引头的光轴角速度矢量在各自光轴坐标系的矢量描述为
|
(6) |
可以看到, 2个光轴坐标系都存在绕自身X轴即光轴(视线)旋转的角速度, 而且二者不相等, 这说明2个坐标系除X轴位置重合外, Y、Z轴都不重合, 存在绕X轴的相对位置与相对速度差, 这些差异是由坐标系定义与旋转变换方法不同引起的。
为了消除这种差异, 将2个光轴坐标系绕自身X轴旋转的角速度消除, 称之为视线消旋, 即令
|
(7) |
将视线消旋后的光轴角速度投影到弹体坐标系下, 得到
|
(8) |
联立(2)式可得

|
(9) |
即视线消旋后的俯仰偏航式导引头和滚仰式导引头的光轴角速度相等。
以上分析表明, 滚仰式导引头与俯仰偏航式导引头一样, 都能够通过自身的框架运动使光轴指向目标, 但是由于俯仰偏航式导引头和滚仰式导引头的框架结构特性的差异, 导致框架运动方式不同, 在指向同一目标的过程中, 虽然二者在框架角度上有一定的对应关系, 但是各自导引头光轴坐标系都存在绕X轴的旋转运动, 即两种导引头的光轴坐标系的X轴指向相同, 但是Y轴和Z轴却不重合, 这导致了视线角速度的不相等。
2 滚仰式导引头与俯仰偏航式导引头对比滚转俯仰二自由度稳定跟踪平台的俯仰方向框架角可以达到±90°, 滚转框架可以实现0°~360°连续旋转, 因此很容易覆盖整个前半球空间范围。而且滚转俯仰二自由度稳定跟踪平台的滚转框架最大滚转角速度高达1 600°/s, 俯仰框架最大俯仰角速度可达到800°/s。而俯仰偏航式导引头最大框架角为±75°, 最大框架角速度为600°/s。俯仰偏航式导引头和滚仰式导引头的对比如表 1所示[9]。
| 导引头种类 | 运动形式 | 框架角/(°) | 框架角速度/(°)·s-1 |
| 滚仰式 | 极坐标 | 滚转角:0~360 俯仰角:-90~90 |
滚转角速度:1 600 俯仰角速度:800 |
| 俯仰偏航式 | 直角坐标 | 偏航角:-75~75 俯仰角:-75~75 |
偏航角速度:600 俯仰角速度:600 |
由表 1可知, 滚仰式导引头能够实现±90°的离轴发射角, 同时由于滚仰式导引头采用极坐标运动形式, 而且滚转框架角速度很大, 因此能够跟踪视线角速度的快速滚转, 而俯仰偏航式导引头由于受到自身框架角和角速度的限制而使跟踪效果受到严重影响[10]。
3 仿真结果与分析为了验证滚仰式导引头和俯仰偏航式导引头的跟踪能力, 复现导引头跟踪导弹和目标视线快速滚转, 简化导弹和目标的相对运动模型, 假设导弹静止, 目标做圆周运动, 导弹和目标相对运动关系为
|
(10) |
俯仰偏航式导引头和滚仰式导引头跟踪视线快速滚转的框架角如图 2和图 3所示。俯仰偏航式导引头和滚仰式导引头跟踪视线快速滚转的框架角速度对比如图 4所示。

|
| 图 2 俯仰偏航式导引头跟踪框架角 |

|
| 图 3 滚仰式导引头跟踪框架角 |

|
| 图 4 俯仰偏航式导引头和滚仰式导引头跟踪视线快速滚转的框架角速度对比 |
由(10)式可知, 图 4中理想输出角速度Ω=[Ωx Ωy Ωz]T=[π 0 0]T。仿真图中虚线代表俯仰偏航式导引头跟踪性能, 实线代表滚仰式导引头跟踪性能。
由图 2和图 3可知, 当导弹和目标视线快速滚转时, 滚仰式导引头能够精确地跟踪视线快速滚转, 经过动态调整后稳定跟踪视线角速度; 而俯仰偏航式导引头由于受到自身框架角运动形式以及框架角和框架角速度的限制等因素的影响, 产生很大的误差, 无法精确跟踪测量视线角速度信息。
为了验证两种导引头的大离轴发射能力。设置导弹和目标初始状态分别为xm=0, ym=0, zm=0, θm=0°, ψVm=0°, Vm=800 m/s和xt=0, yt=5 000, zt=5 000, θt=0°, ψVt=90°, Vt=300 m/s即导弹大离轴角发射的仿真环境。大离轴角发射情况下基于俯仰偏航式导引头和滚仰式导引头制导系统的三维弹道和过载对比如图 5和图 6所示。

|
| 图 5 三维弹道 |

|
| 图 6 过载 |
由图 5和图 6可知,在大离轴角发射的情况下,基于俯仰偏航式导引头的制导系统由于受到导引头跟踪框架角和角速度的限制而无法精确跟踪目标,弹道和过载振荡发散,严重影响制导系统性能;而基于滚仰式导引头的制导系统已然能够控制导弹实现精确打击目标的目的,而且弹道曲线和弹道需用过载都能够满足要求。
4 结论滚仰式导引头两轴稳定平台符合导弹对导引头小型化的要求,而且滚仰式导引头能够满足导弹大离轴角发射以及精确跟踪视线快速滚转的要求,因此滚仰式导引头具有很大的研究价值和应用前景。
| [1] |
王志伟, 祁载康, 王江.
滚-仰式导引头跟踪原理[J]. 红外与激光工程 , 2008, 37 (2) : 274–277.
Wang Zhiwei, Qi Zaikang, Wang Jiang. Tracking Principle for Roll-Pitch Seeker[J]. Infrared and Laser Engineering , 2008, 37 (2) : 274–277. |
| [2] | Bertil Ekstrand. Tracking Filters and Models for Seeker Applications[J]. IEEE Trans on Aerospace and Electronic Systems , 2001, 37 (3) : 965–977. DOI:10.1109/7.953250 |
| [3] |
林德福, 王志伟, 王江.
滚-仰式导引头奇异性分析与控制[J]. 北京理工大学学报 , 2010, 30 (11) : 1265–1269.
Lin Defu, Wang Zhiwei, Wang Jiang. Singularity Analysis of Roll-Pitch Seeker and Its Control Strategy[J]. Transactions of Beijing Institute of Technology , 2010, 30 (11) : 1265–1269. |
| [4] |
陈雨, 赵剡, 张同贺.
滚仰式捷联导引头跟踪原理与仿真[J]. 航空兵器 , 2010, 5 : 55–58.
Chen Yu, Zhao Yan, Zhang Tonghe. Tracking Principle and Simulation for Roll-Pitch Strapdown Seeker[J]. Aero Weaponry , 2010, 5 : 55–58. |
| [5] |
孙高, 赵桂军, 吕鉴倬.
半捷联滚仰导引头视线角速度重构提取技术[J]. 制导与引信 , 2015, 36 (2) : 10–13.
Sun Gao, Zhao Guijun, Lü Jianzhuo. LOS Rate Extraction Technology of Semi Strapdown Roll-Pitch Seeker[J]. Guidance & Fuze , 2015, 36 (2) : 10–13. |
| [6] | Yang C L, Zhang N, Jia H G. LOS Rate Reconstruction and Application of Roll-Pitch Seeker[C]//IEEE International Conference on Electrical and Control Engineering, 2011:2307-2310 |
| [7] |
穆学桢, 周树平, 赵桂瑾.
AIM-9X空空导弹位标器新技术分析和评价[J]. 红外与激光工程 , 2006, 35 (4) : 392–394.
Mu Xuezhen, Zhou Shuping, Zhao Guijin. Analysis and Evaluation of New Approach of AIM-9X AAM Seeker[J]. Infrared and Laser Engineering , 2006, 35 (4) : 392–394. |
| [8] |
江云, 李友年, 王霞.
滚仰式捷联导引头视线角速度提取技术研究[J]. 电光与控制 , 2015, 22 (4) : 66–69.
Jiang Yun, Li Younian, Wang Xia. Line-of-Sight Angle Rate Extraction for Roll-Pitch Strap-Down Seeker[J]. Electronics Optics & Control , 2015, 22 (4) : 66–69. |
| [9] |
李新国, 周国财, 曾颖超.
大离轴角发射导弹的制导律研究[J]. 西北工业大学学报 , 2003, 21 (4) : 432–434.
Li Xinguo, Zhou Guocai, Zeng Yingchao. Feedback Linearized Guidance Law for High Off-Boresight Launch Conditions[J]. Journal of Northwestern Polytechnical University , 2003, 21 (4) : 432–434. |
| [10] |
张滋烈, 张安.
空对空导弹的离轴发射[J]. 航空学报 , 1988, 9 (8) : 413–418.
Zhang Zilie, Zhang An. The Off-Boresight Launch of Air-to-Air Missile[J]. Acta Aeronautica et Astronautica Sinica , 1988, 9 (8) : 413–418. |
