

2. 康科迪亚大学 机械与工业工程系, 蒙特利尔, QC H3G 1M8, 加拿大
在未知近海岸低空区域中,准确的风场估计对该区域里风能的探测、开发和利用有着至关重要的作用[1]。在这样的应用背景下,传统陆基测风仪器设备的昂贵和平台依赖性等弊端就体现了出来。相反的,以无人飞行器(UAV)为主要平台的风场估计方法因其廉价可回收、方便灵活等特点,成为了对传统风环境估计方法的良好替代[2]。
根据所选用的飞行器类型,无人机风场估计方法可分为固定翼无人机风场估计方法和旋翼无人机风场估计方法。虽然以固定翼无人机[3]为平台的风场估计方法具有测量范围大、续航时间长等特点,但是其无法做到对风信息的定点测量。并且因为固定翼无人机需要保持较高的空速以保证其正常的飞行,所以低风速和小范围的风信息变化因占比小而无法被测量[4]。
以四旋翼无人机为平台的风场估计方法能够很好的弥补固定翼无人机测风的不足。首先,四旋翼飞行器能够保持定点悬停状态,从而实现风信息的定点测量,得到固定位置气流信息(风速和风向)随时间的变化关系。其次,由于定点悬停状态下旋翼的气动特性造成飞行器横侧向扰流较小,低风速和小范围的风信息变化的测量精度得以提高。 利用四旋翼无人机的风场估计方法有2个关键的问题亟待解决。第一是如何实现有风条件下四旋翼飞行器的悬停保持。四旋翼作为一个典型的欠驱动强耦合非线性系统,能够实现六自由度的飞行运动。在有风扰动情况下,飞行器运动的数学模型会发生变化,简单的控制方法难以实现理想的悬停控制效果。第二是如何从四旋翼飞行器的飞行数据中提取有效部分,从而计算得到风场环境信息。风扰动与四旋翼的气动耦合关系不是简单的线性叠加,很难显式的求解得到风场信息的表达式。
针对上述问题,本文提出了一种基于悬停四旋翼飞行器位置姿态信息的风场估计方法。该方法通过六通道PID控制器实现了四旋翼在风扰情况下的悬停控制,并利用已知的四旋翼气动参数,推导出风场信息的近似计算方程。最后利用MATLAB/M-File编程对本文所提出风场估计方法的有效性进行了仿真测试。
1 四旋翼飞行器动力学模型 1.1 旋翼空气动力分析有风情况下,旋翼的空气动力学分析如图 1所示。

|
| 图 1 旋翼气动力分析图 |
图中,v1表示由旋翼旋转而产生的诱导速度,vw表示风速,vt表示诱导速度和风速的合速度,α表示风与旋翼旋转平面形成的角度,风自上而下流过旋翼旋转平面角度为正,FT表示旋翼的升力,沿yD轴正方向为正,与v1方向相反。
根据旋翼滑流理论,无风条件下旋翼升力可以表示为

在无风条件下,旋翼的升力和扭矩均与转速的平方成正比[5]
旋翼的诱导速度可以表示为
在有风场情况下,旋翼的总升力[6]可表示为

根据旋翼叶素理论,经过简化的旋翼升力和扭矩公式可表示为
考虑图 1中v1、vw与vt的几何关系,由余弦定理

建立如图 2所示坐标系。选择“北东地”作为导航坐标系。机体坐标系下,xb轴沿机体纵轴,指向前方;yb轴沿机体横轴,指向右翼;zb轴与xb轴、yb轴构成右手系,指向机体底部。初始状态下,机体坐标系和导航坐标系重合。姿态角[WTHX]Θ[WTBX]=[JB([][HL(3]φ[]θ[]ψ[HL)][JB)]]T,分别表示滚转角[JB((][SX(]-π[]2[SX)]≤φ≤[SX(]π[]2[SX)][JB))],俯仰角[JB((][SX(]-π[]2[SX)]≤θ≤[SX(]π[]2[SX)][JB))]和偏航角(-π≤ψ≤π)。
假设四旋翼飞行器是由刚体机身和4个理想旋翼组成。4个旋翼被分成2组,旋翼1和旋翼3的旋转方向与zb轴正方向一致,旋翼2和旋翼4的旋转方向与zb轴的正方向相反,用以抵消旋翼1和旋翼3因旋转产生的反扭矩。

|
| 图 2 四旋翼飞行器坐标系示意图 |
通过控制旋翼2和旋翼4的转速差,能够实现机体绕xb轴的滚转运动和沿yb的平动;通过控制旋翼1和旋翼3的转速差,能够实现机体绕yb轴的俯仰运动和沿xb轴的平动;通过控制旋翼1、2、3、4的转速不同,能够实现机体绕zb轴的偏航运动和沿zb轴的平动。
在导航坐标系下,根据牛顿-欧拉方法,对飞行器进行受力和运动分析。

 表示飞行器质心运动的加速度,
表示飞行器质心运动的加速度, 表示旋翼i的升力作用,
表示旋翼i的升力作用, 表示重力加速度在3个方向的分量,
表示重力加速度在3个方向的分量, 表示飞行器在3个方向上受到的风阻力。
表示飞行器在3个方向上受到的风阻力。
根据空气阻力的计算公式
 表示空速。
表示空速。


 表示机体坐标系下飞行器的转动角速度,JR是旋翼的转动惯量,ωr是旋翼的相对速度
表示机体坐标系下飞行器的转动角速度,JR是旋翼的转动惯量,ωr是旋翼的相对速度

 表示由旋翼旋转而产生的陀螺转矩。MR表示飞行器受到的合空气扭矩。
表示由旋翼旋转而产生的陀螺转矩。MR表示飞行器受到的合空气扭矩。
由机体坐标系下的倾转角速度到导航坐标系下的姿态角速度的变换矩阵如下
综合(8)~(14)式,得到有风扰动下的四旋翼飞行器的运动学和动力学模型

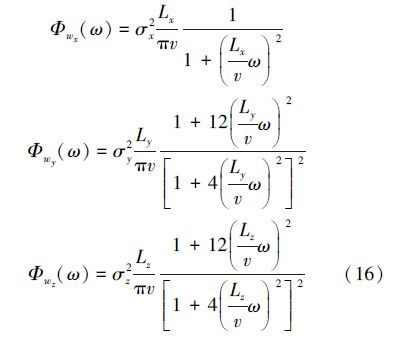
大气扰动中包含各种时间和空间尺度的运动,其产生的机理和发展过程各不相同。采用复杂的大气动力学方程来研究大气环境对飞行影响的规律是不方便的。因而广泛使用简化大气扰动模型,它主要描述风场基本物理参数之间的关联,而忽略一些次要的影响因素。本文中采用Dryden大气紊流模型,将标准高斯白噪声序列通过成形滤波器,形成有色噪声序列,完成对大气紊流的模拟。
根据文献[8],Dryden模型的时间谱函数为
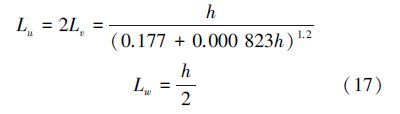
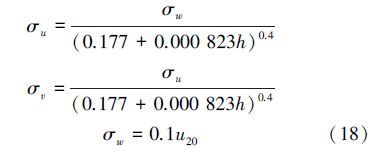
由于四旋翼飞行器的飞行高度有限,根据文献[9],在低空条件下,紊流强度和紊流尺度可由(17)、(18)式计算
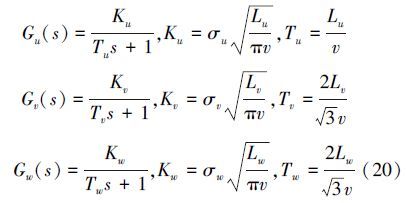
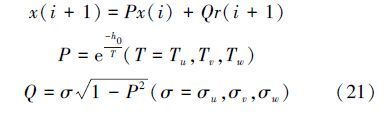
将单位强度的白噪声序列r(t)通过一个传递函数为G(s)的滤波器,产生输出序列x(t),输出频谱函数为

本文采用六通道的PID控制器,实现了四旋翼飞行器的悬停控制。将4个旋翼的转速ω1、ω2、ω3、ω4定义为系统的输入量。为了简化控制器的设计过程,做出如下假设:
1) 桨盘各处的诱导速度相等,忽略旋翼旋转的边缘效应,不考虑因旋翼工作而产生的扰流的相互影响。
2) 与飞行器的倾转扭矩相比,有旋翼的旋转力矩是小量,可以忽略。
3) 与四旋翼飞行器的质量相比,旋翼的质量为小量,忽略旋翼的转动惯量。
4) 本文只考虑小角度的四旋翼运动,因此,导航坐标系下的姿态角速度与机体坐标系下的倾转角速度近似相等。
控制系统结构如图 3所示。

|
| 图 3 悬停控制系统结构示意图 |
其中,xd、yd、zd、φd、θd、ψd分别表示期望控制四旋翼飞行器达到的位置和姿态。T、Mφ、Mθ、Mψ分别表示为达到期望悬停状态而计算得到的总升力、滚转力矩、俯仰力矩和偏航力矩。
该控制系统分为2个部分:内环的姿态控制和外环的位置控制。首先利用3个通道的PID控制器将期望位置信息(xd,yd,zd)和反馈得到的当前位置信息(x,y,z)送入逆解算单元,计算得到合升力T,期望滚转角φd和期望俯仰角θd;然后利用期望姿态信息(φd,θd,ψd)和当前姿态信息(φ,θ,ψ),通过另外3个通道的PID控制器,计算得到目标滚转力矩Mφ、俯仰力矩Mθ和偏航力矩Mψ;最后利用之前计算得到的总升力和3个方向的力矩(T,Mφ,Mθ,Mψ)通过转速分配模块,计算得到系统的输入量(ω1,ω2,ω3,ω4)。
① 位置控制器设计
通道1、通道2、通道3的PID控制器分别用作计算控制四旋翼飞行器沿导航坐标系下3个坐标轴的加速度。数学表达式如下
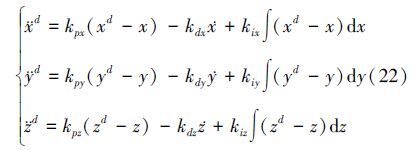
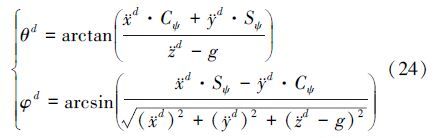
紧接着,利用(22)式计算得到的期望加速度 ,计算得到总升力和期望姿态信息的表达式如下
,计算得到总升力和期望姿态信息的表达式如下

② 姿态控制器设计
通道4、通道5、通道6的PID控制器分别用作计算控制四旋翼飞行器绕机体坐标系下3个坐标轴的角加速度。数学表达式如下
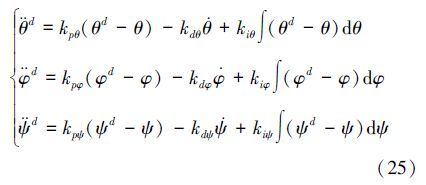
考虑到姿态角对整个控制系统非线性性质造成的影响,在控制器设计时,对滚转角和俯仰角进行限幅,-10°≤φ≤10°,-10°≤θ≤10°。由于在姿态控制环中引入积分项会引起系统超调,造成控制系统超越限幅和不稳定,所以,令kiφ=0,kiθ=0,kiψ=0,3个通道的PID控制退化为PD控制。
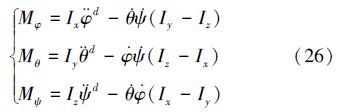
绕3个坐标轴的旋转力矩的数学表达式如下
四旋翼飞行器的悬停过程总是要保持导航坐标系下3个方向的位移X=0,偏航角ψ=0。根据(15)式,可以得到风扰力的表达式

 表示飞行器沿导航坐标系三个方向的平动加速度。Cbn表示由机体坐标系到导航坐标系的转换矩阵。
表示飞行器沿导航坐标系三个方向的平动加速度。Cbn表示由机体坐标系到导航坐标系的转换矩阵。 表示旋翼i的升力矩阵,与旋翼转速和风扰有关。
表示旋翼i的升力矩阵,与旋翼转速和风扰有关。
考虑到四旋翼飞行器的低风扰动飞行环境和小角度悬停控制过程,横侧向方程可做如下简化
取6.096 m高度的风速为5 m/s,四旋翼飞行器的飞行高度为10 m。紊流风场的参数如表 1所示,生成的紊流风场如图 4所示。

|
| 图 4 紊流风场图 |
在xn轴方向紊流的基础上叠加了一个大小4 m/s,方向与xn轴正方向相反的常值风;在yn轴方向紊流的基础上叠加了一个大小3 m/s,方向与yn轴正方向相同的常值风。
4.2 悬停控制仿真模型参数如表 2所示,PID控制器参数如表 3所示。控制效果如图 5、图 6所示。
| 参数 | 量值 | 参数 | 量值 |
| 空气密度/(kg·m-3) | 1.29 | 桨叶半径/m | 0.1 |
| 质量/kg | 1.6 | 臂长/m | 0.3 |
| Xb/yb转动惯量/kg·m2 | 0.03 | Zb转动惯量/(kg·m2) | 0.04 |
| 升力系数 | 1.55×10-5 | 反扭矩系数 | 2.82×10-7 |
| Xb空阻系数 | 0.5 | Xb迎风面积/m2 | 0.05 |
| yb空阻系数 | 0.5 | yb迎风面积/m2 | 0.05 |
| zb空阻系数 | 0.5 | zb迎风面积/m2 | 0.2 |
| 位置控制通道 | ||
| kpx、kpy、kpz | kix、kiy、kiz | kdx、kdy、kdz |
| 0.3 | 0.1 | 0.9 |
| 姿态控制通道 | ||
| kpφ、kpθ、kpψ | kdφ、kdθ、kdψ | |
| 15 | 5 | |

|
|
图 5 四旋翼悬停横侧向位移图 |

|
| 图 6 四旋翼悬停滚转角/俯仰角偏移图 |
由仿真结果图可看出,PID悬停控制器取得了理想的控制效果。位移偏移量较小,角度偏移量小于10°。
4.3 风场环境估计利用仿真得到的有风扰动下的四旋翼悬停飞行数据,结合之前提出的风场估计方法,对四旋翼的飞行环境重新估计。仿真结果如图 7所示。

|
| 图 7 风场估计效果图 |

|
| 图 8 估计风场环境误差分析图 |
比较图 4和图 7,估计得到的风场环境信息与仿真风场环境信息具有相同的变化趋势。误差分析如图 8所示,xn方向与yn方向的估计误差均小于1 m/s。造成误差的原因主要是因为利用(28)式对旋翼升力做了近似化处理,而风扰动对旋翼升力的影响不可忽略。
5 结 论针对四旋翼的定点悬停动力学特性,本文提出了基于悬停四旋翼位置及姿态信息的风场环境估计方法。仿真验证了在低风速扰动情况下,该方法的可行性。
此研究工作考虑了风扰对四旋翼飞行器气动建模的影响,推导得到了估计风场环境的近似方程,为无人机探测风场的研究提供了一种新的思路。
| [1] | Fichaux N, Beurskens J, Jensen P H, et al. Upwind: Design Limits and Solutions for Very Large Wind Turbines[R]. Brussels, Sixth Framework Programme, 2011 |
| [2] | Moyano Cano J. Quadrotor UAV for Wind Profile Characterization[D]. Madrid, Universidad Carlos Ⅲ de Madrid, 2013 |
| [3] | 屈耀红, 于丽丽, 周迎,等. 小型固定翼无人机多步长在线风场估计[J]. 西北工业大学学报, 2015, 33(5): 750-756 Qu Yaohong, Yu Lili, Zhou Ying, et al. Multi-Step Wind Field Estimation Online of Small Fixed-Wing UAVs[J]. Journal of Northwestern Polytechnical University, 2015, 33(5): 750-756 (in Chinese) |
| Click to display the text | |
| [4] | Velasco-Carrau J, García-Nieto S, Salcedo J V, et al. Multi-Objective Optimization for Wind Estimation and Aircraft Model Identification[J]. Journal of Guidance, Control, and Dynamics, 2015, 39: 1-18 |
| [5] | Nagaty A, Saeedi S, Thibault C, et al. Control and Navigation Framework for Quadrotor Helicopters[J]. Journal of intelligent & robotic systems, 2013, 70(1/2/3/4): 1-12 |
| Click to display the text | |
| [6] | Tran N K, Bulka E, Nahon M. Quadrotor Control in a Wind Field[C]//2015 International Conference on Unmanned Aircraft Systems, 2015: 320-328 |
| [7] | He Y, Chen Y, Zhou M. Modeling and Control of a Quadrotor Helicopter Under Impact of Wind Disturbance[J]. Journal of Chinese Inertial Technology, 2013, 5: 013 |
| [8] | Beal T R. Digital Simulation of Atmospheric Turbulence for Dryden and Von Karman Models[J]. Journal of Guidance, Control and Dynamics, 1993, 16(1): 132-138 |
| Click to display the text | |
| [9] | 肖叶伦,金长江. 大气扰动中的飞行原理[M]. 北京:国防工业出版社,1993: 73-74 XiaoYelun, Jin Changjiang. Flight theory in Atmospheric Disturbance[M]. Beijing, National Defense Industry Press,1993: 73-74 (in Chinese) |
2. Department of Mechanical and Industrial Engineering, Concordia University, Montreal, QC H3G 1M8, Canada
