

目前,声呐系统中常采用重复发射脉冲信号,并利用接收回波与发射脉冲信号间的时间差来进行测距。在这种多脉冲检测体制下,信号积累技术常被用来提高声呐的微弱目标检测能力。然而,当目标回波的传播时延大于脉冲重复周期时,将会产生距离模糊。同时,随着脉冲积累时间的增加,由于声呐平台与目标之间的相对运动,脉冲回波在慢时间维上将不再处于同一个快时间维距离单元内,而是在不同的快时间维距离单元内走动。如果不考虑目标回波的跨距离走动和跨脉冲重复周期的距离模糊,就无法有效地利用信号能量,从而无法实现回波脉冲的有效积累检测和目标真实距离的判定。
解距离模糊的方法主要有信号处理法、中国余数定理(Chinese remainder theorem,CRT)、排列组合方法、多假设目标跟踪方法、稀疏重构法、运动累积测距法和滤波法等。其中,CRT由于其计算简单,运算速度快而成为一种最常用的解模糊方法。但是,传统CRT的输入和输出均为整数,无法应用在实数域,且对余数的误差非常敏感。因此,目前对CRT类算法的改进和优化基本上都是用来解决实数输入值以及测距误差所导致的真实距离重构误差的[1, 2, 3, 4, 5, 6, 7]。戴文琪等明确指出测距误差主要是指由于杂波和噪声干扰以及目标运动等因素所引起的测量误差[1],并在文献[2]中提出一种具有纠错能力的解模糊算法,通过纠错数对有重构误差的重构数进行纠错,纠错后的剩余误差与余数的误差精度相同。文献[3, 4, 5, 6, 7]研究了稳健的CRT重构算法,采用一组非互质的模数及相应的有误差的余数来估计整数。文献[3, 4]将其扩展到实数域。文献[5]提出一种多阶的CRT算法,扩大了模数的取值范围。文献[6]提出一种基于最大似然估计的CRT算法,能够在余数误差服从缠绕高斯分布的情况下对实数进行重构。文献[7]使用点阵理论来估计距离。这些优化改进算法将目标运动所引起的目标距离变化归纳到了测量误差中,认为待重构的目标距离 为某一未知整数。然而,匀速运动的目标在每一个探测周期内所处的距离单元有可能是不相同的,可能是一系列距离值Ri(1≤i≤k,k为脉冲重复周期个数)。在这种情况下,解距离模糊算法就不再是对一个未知数进行重构,而应是对一系列未知数进行重构,继续使用CRT算法将会产生较大的误差。
本文根据长时间积累检测中存在的距离模糊和回波脉冲跨距离单元走动问题,针对匀速运动目标,考虑目标运动对CRT类算法所产生的影响,建立了匀速运动目标多脉冲重复周期的探测回波模型,分析了目标运动速度、脉冲波速、脉冲重复频率以及目标距离变化率之间的相互关系,并提出一种基于距离走动校正的解匀速运动目标距离模糊算法。该算法利用一组数值非互质但满足一定条件的脉冲重复周期(pulse repetition time,PRT)对运动目标进行距离测量,得到一组相应的模糊距离;利用已有的CRT算法重构出目标距离,由于这一重构结果是在忽略由目标运动而引起的目标跨距离单元走动的基础上得到的,此时得到的目标距离是有重构误差的;纠正由距离单元走动带来的目标距离重构误差,得到目标在每个PRT的真实距离,并计算出目标的运动速度。仿真实验表明,本文所提算法在参数配置适当的情况下能够计算出目标距离并估计目标运动速度,在目标模糊距离存在测量误差时也能够较为精确地估计出目标的运动参数,从而校正运动目标的跨距离单元走动,实现目标回波脉冲的有效积累。
1 匀速运动目标多重脉冲重复周期探测回波模型设目标在距离声呐R处,以速度v做匀速运动,定义声呐与目标之间延长线方向为正方向。交替使用k重不同PRT探测目标,k个PRT分别为Tr1,Tr2,…,Trk,脉冲宽度Tp,各PRT内所包含的距离单元数分别为m1,m2,…,mk,m1<m2<…<mk,且mi=floor(Tri/Tp),i=1,2,…,k,floor(·)表示向下取整运算。令x=2R/cTp,则有以下关系
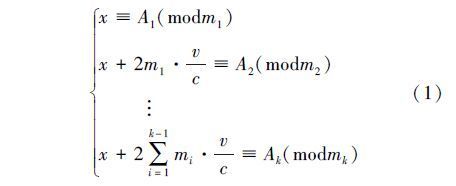
当目标与声呐之间无相对运动(v=0)时,各重复周期之间无跨距离单元走动,(1)式可改写为

1) m1,m2,…,mk两两互质时,x可以由(3)式计算得到:



2) m1,m2,…,mk不是两两互质时,可由(4)式估计x[3]

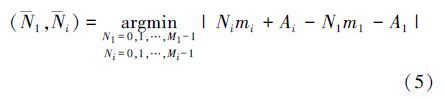

 为各脉冲周期的模糊数,
为各脉冲周期的模糊数, 为满足(5)式的所有(N1,Ni)中的第一组元素。
为满足(5)式的所有(N1,Ni)中的第一组元素。
当目标与声呐之间存在相对运动(v≠0)时,若整个探测时间范围内目标距离的变化不超过1个距离单元,即 <1,此时x仍可由(3)式或(4)式计算得到;若每个PRT间目标距离的走动超过1个距离单元,即2miv/c>1,此时再使用(3)式或(4)式求解目标距离将会出现较大偏差。
<1,此时x仍可由(3)式或(4)式计算得到;若每个PRT间目标距离的走动超过1个距离单元,即2miv/c>1,此时再使用(3)式或(4)式求解目标距离将会出现较大偏差。
令
 可将(1)式改写为:
可将(1)式改写为:


 c为第i个PRT目标所在的位置,
c为第i个PRT目标所在的位置,  为第i+1个PRT目标所在位置相对于第i个PRT目标所在位置的增量。将(7)式简记为
为第i+1个PRT目标所在位置相对于第i个PRT目标所在位置的增量。将(7)式简记为

设N2=N1-p,p为整数。若Δx=0,即相邻的2个脉冲重复周期之间目标无运动,则N1≥N2,且p的取值范围为p=0,1,2,…,N1;若Δx≠0,即相邻2个脉冲重复周期之间目标有运动,此时N2有可能大于N1,p的取值范围为p=-1,0,1,2,…,N1。令d=gcd(m1,m2),Γi=mi/d,i=1,2,m1:m2Q:Q+P,将其带入(8)式可得





 为
为


 为
为




则,对匀速运动目标进行解距离模糊并测速的步骤如图 1所示。

|
| 图 1 算法流程框图 |
Step1 从同余式组(6)的k个同余式中依次取相邻的2个同余式组成k-1个同余式组:
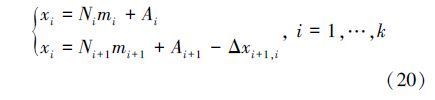
Step2 利用(20)式中所列的k-1个同余式组依次求解xi,i=1,2,…,k-1;
substep1 将x′i看做是忽略Δxi+1,i的影响而计算得到的带有误差的目标距离,利用(4)式求解同余式组:

substep2 计算 …,其中,mi/mi+1=Q/(Q+P),γ=(Q+P)/P;
…,其中,mi/mi+1=Q/(Q+P),γ=(Q+P)/P;
substep3 找到所有满足条件 中最大的值r(i)l,j=0,1,2,…;
中最大的值r(i)l,j=0,1,2,…;
substep4 计算
substep5 计算目标距离 /2。
/2。
Step3 使用(22)式估计每个PRT内目标运动速度
Step4 由于目标匀速运动,因此计算得到的k-2个vi的值应近似相等。定义


1) 无噪声干扰情况 无噪声干扰情况下,设目标真实的初始距离和速度分别为Rrel和vrel,每个探测周期目标真实的初始距离为Rreli,i=1,2,…,k,则vrel可表示为


由于在计算目标所在距离单元x和运动速度v时使用的Ai和mi均是以距离单元为单位的整数,因此,计算得出的xi也是整数,即 将xreli 表示为整数部分加小数部分的形式,即令xreli=round(xreli)+F(xreli),其中,F(xreli)为xreli 的小数部分,且F(xreli)=xreli-round(xreli),|F(xreli)|<1/2。则,利用(25)式估计出的v将存在误差Δv
将xreli 表示为整数部分加小数部分的形式,即令xreli=round(xreli)+F(xreli),其中,F(xreli)为xreli 的小数部分,且F(xreli)=xreli-round(xreli),|F(xreli)|<1/2。则,利用(25)式估计出的v将存在误差Δv

为了能够较为准确地估计出目标的运动速度,需要使|Δv|1,即满足

2) 有噪声干扰情况
噪声干扰下,设测得的模糊距离存在误差ΔAi,即i=Ai+ΔAi。 由文献[8]可知,若|ΔAi|≤ε,则当d>4ε时,通过(4)式计算得到的x′i也存在估计误差Δx′i,且其上限为



下面分别从无噪声干扰情况和有噪声干扰情况入手,对本文所提算法进行仿真实验,并给出了仿真结果,分析了mi的取值对算法性能的影响,从而验证本文算法的合理性及科学性。
3.1 无噪声干扰情况下d对算法性能的影响以三重PRT系统为例,设目标速度v的范围为-30~30 m/s,目标初始距离1 700个距离单元,Γ1=139,Γ2=181,Γ3=229,d分别取4、10、20。
d=10时的测距结果如表 1所示,并与文献[5]所提的闭式RCRT算法进行了比较。本文算法能够正确地重构出每个PRT内目标所在的距离单元,测距误差为使用测量值进行计算的四舍五入误差。而闭式RCRT只能在v=0时正确估计目标距离,当v≠0时,测距误差相当大。这是由于在目标匀速运动的情况下,各重复周期之间目标距离的变化较大,若将每周期内的跨距离单元走动看作是测量误差,已经超过了闭式RCRT所要求的余数误差小于d/4的前提条件,因此无法准确重构出目标的距离。
| v/(m·s-1) | 真实值(距离单元) | 本文算法(距离单元) | 闭式RCRT(距离单元) | |||||||
| x1rel | x2rel | x3rel | x1 | x2 | |Δx| | x1 | x2 | |Δx| | ||
| -30 | 1 700.0 | 1 644.4 | 1 572.0 | 1 700 | 1 644 | 0.0,0.4 | 37 840 | 45 084 | 36 140.0,43 439.6 | |
| -20 | 1 700.0 | 1 662.9 | 1 614.7 | 1 700 | 1 663 | 0.0,0.1 | 193 520 | 269 543 | 191 820.0,267 880.1 | |
| -10 | 1 700.0 | 1 681.5 | 1 657.3 | 1 700 | 1 681 | 0.0,0.5 | 97 610 | 191 731 | 95 910.0,190 073.7 | |
| 0 | 1 700.0 | 1 700.0 | 1 700.0 | 1 700 | 1 700 | 0.0,0.0 | 1 700 | 1 700 | 0.0,0.0 | |
| 10 | 1 700.0 | 1 718.5 | 1 742.7 | 1 700 | 1 719 | 0.0,0.5 | 157 380 | 226 159 | 155 680.0,224 416.3 | |
| 20 | 1 700.0 | 1 737.1 | 1 785.3 | 1 700 | 1 737 | 0.0,0.1 | 61 470 | 148 347 | 59 770.0,146 561.7 | |
| 30 | 1 700.0 | 1 755.6 | 1 828.0 | 1 700 | 1 756 | 0.0,0.4 | 217 150 | 372 806 | 215 450.0,371 050.4 | |
测速结果如图2所示。 (无噪声干扰,x=1 700,Γ1=139,Γ2=181,Γ3=229

|
| 图 2 目标运动速度对测速误差的影响 |
由于  ,因此仿真参数满足(18)式的条件。但当d=4时m1=556,m2=724,m3=916,不满足(27)式的条件,因此测速误差较大,在0.4 m/s左右;当d=10时,m1=1 390,m2=1 810,m3=2 290,满足(27)式的条件,测速误差可以控制在0.15 m/s左右;d=20时,测速误差小于d=10的情况。因此,在无噪声干扰情况下,给定Γi,d越大,估计出的目标速度越精确。
,因此仿真参数满足(18)式的条件。但当d=4时m1=556,m2=724,m3=916,不满足(27)式的条件,因此测速误差较大,在0.4 m/s左右;当d=10时,m1=1 390,m2=1 810,m3=2 290,满足(27)式的条件,测速误差可以控制在0.15 m/s左右;d=20时,测速误差小于d=10的情况。因此,在无噪声干扰情况下,给定Γi,d越大,估计出的目标速度越精确。
设目标速度分别为1 m/s、2 m/s和10 m/s,目标初始距离分别为1 000、1 001、1 002个距离单元,在无噪干扰情况下使用m1=1 390、m2=1 810、m3=2 290探测目标,测距结果如表2所示。本文所提算法能够正确估计出目标在每个周期的距离,测距误差为计算时的四舍五入误差。由于在3.1节中已经通过仿真说明了闭式GRCRT无法解决运动目标的模糊问题,因此本节仅对本文所提算法进行了仿真。
由(26)式可知,无噪声干扰情况下,Δv与目标运动所引起的距离门走动归一化时的四舍五入误差大小有关。因此在目标运动速度v一定的情况下,目标初始所在的距离单元x对Δv无影响。
| v/(m·s-1) | 真实值(距离单元) | 测距结果(距离单元) | ||||
| xrel1 | xrel2 | xrel3 | x1 | x2 | |Δx1| | |Δx2| |
| 1 | ||||||
| 1 000.0 | 1 001.9 | 1 004.3 | 1 000 | 1 002 | 0.0 | 0.1 |
| 1 001.0 | 1 002.9 | 1 005.3 | 1 001 | 1 003 | 0.0 | 0.1 |
| 1 002.0 | 1 003.9 | 1 006.3 | 1 002 | 1 004 | 0.0 | 0.1 |
| 2 | ||||||
| 1 000.0 | 1 003.7 | 1 008.5 | 1 000 | 1 004 | 0.0 | 0.3 |
| 1 001.0 | 1 004.7 | 1 009.5 | 1 001 | 1 005 | 0.0 | 0.3 |
| 1 002.0 | 1 005.7 | 1 010.5 | 1 002 | 1 006 | 0.0 | 0.3 |
| 10 | ||||||
| 1 000.0 | 1 018.5 | 1 042.7 | 1 000 | 1 019 | 0.0 | 0.5 |
| 1 001.0 | 1 019.5 | 1 043.7 | 1 001 | 1 020 | 0.0 | 0.5 |
| 1 002.0 | 1 020.5 | 1 044.7 | 1 002 | 1 021 | 0.0 | 0.5 |
| 模糊距离测量值(距离单元) | 测距结果(距离单元) | |||||
| Â1 | Â2 | Â3 | x1 | x2 | Δx | |
| 308 | 228 | 1 741 | 1 698 | 1 718 | 2.0,0.5 | |
| 309 | 229 | 1 739 | 1 699 | 1 719 | 1.0,0.5 | |
| 309 | 228 | 1 739 | 1 699 | 1 718 | 1.0,0.5 | |
| 312 | 226 | 1 738 | 1 702 | 1 716 | 2.0,2.5 | |
| 308 | 230 | 1 735 | 1 698 | 1 720 | 2.0,1.5 | |
| 313 | 230 | 1 736 | 1 703 | 1 720 | 3.0,1.5 | |
| 308 | 228 | 1 739 | 1 698 | 1 718 | 2.0,0.5 | |
| 309 | 228 | 1 740 | 1 699 | 1 718 | 1.0,0.5 | |
| 307 | 228 | 1 737 | 1 697 | 1 718 | 3.0,0.5 | |
| 312 | 229 | 1 737 | 1 702 | 1 719 | 2.0,0.5 | |
若目标速度为10 m/s,目标初始距离1 700个距离单元,m1=1 390,m2=1 490,m3=2 290,则xrel1=1 700.0,xrel2=1 718.5,xrel3=1 738.4,A1=310,A2=229,A3=1 738。设系统测量误差|ε|≤3,测距结果如表3所示。在噪声干扰的条件下,本文所提算法依然能够正确恢复出目标距离,且测距结果的误差|Δx|≤3,精度与系统的测量误差精度相同。
设目标速度-30 m/s,目标初始距离1 700个距离单元,Γ1=139,Γ2=181,Γ3=229,d分别取4、10、20,测量误差上限ε的范围为0~3,图3a)是使用本文算法测距1 000次Monte-Carlo实验的结果。由于 ,因此所选参数满足(29)式的条件。但当d=4时,m1=
(有噪声干扰,v=-30 m/s,x=1 700)
图3 测量误差对测速误差的影响
556,m2=724,m3=916,不满足(30)式的条件,如图3a)中“*”线所示,在ε=0.3时测速误差就已经超过0.5 m/s;当d=10时,m1=1 390,m2=1 810,m3=2 290,在ε<1时满足(30)式的条件,测速误差小于0.5.> m/s,ε>1时不满足(30)式的条件,测速误差较大,如图3a)中“○”线所示;当d=20时,测速精度高于d=10时的测速精度,曲线如图3a)中“▯”线所示。
,因此所选参数满足(29)式的条件。但当d=4时,m1=
(有噪声干扰,v=-30 m/s,x=1 700)
图3 测量误差对测速误差的影响
556,m2=724,m3=916,不满足(30)式的条件,如图3a)中“*”线所示,在ε=0.3时测速误差就已经超过0.5 m/s;当d=10时,m1=1 390,m2=1 810,m3=2 290,在ε<1时满足(30)式的条件,测速误差小于0.5.> m/s,ε>1时不满足(30)式的条件,测速误差较大,如图3a)中“○”线所示;当d=20时,测速精度高于d=10时的测速精度,曲线如图3a)中“▯”线所示。

|
| 图 3 测量误差对测速误差的影响 |
当v=-30 m/s,Γ1=139,Γ2=149,Γ3=229时,由于Γ1:Γ2=139:(139+10),即Q=139,P=10,此时无论ε的取值有多小,都无法满足(29)式所列的条件,因此无法对目标进行精确测距,如图3b)所示。
通过延长信号积累时间,水下主动声呐系统可以提高微弱目标检测能力,并完成目标与声呐间径向速度的提取。但是,长时间积累也带来了一些新的技术问题,主要是在积累时间内目标回波有可能发生距离模糊和距离走动。为此,本文对匀速运动目标的多重脉冲重复周期探测回波进行建模,并提出一种基于距离走动校正的解匀速运动目标距离模糊算法。该算法考虑目标运动对多重PRT探测性能所产生的影响,在利用已有CRT算法计算得到带有重构误差的目标距离后,通过公式纠正由于目标运动带来的目标距离估计误差,得到目标在每个脉冲重复周期的真实距离,并计算出目标的运动速度。数值仿真结果表明,本文所提算法能够在存在距离模糊和距离走动的情况下估算出待测目标的运动参数,实现运动目标检测中的解距离模糊和距离走动补偿。
| [1] |
戴文琪, 王家隆, 曾建瑜. 余数法解距离模糊的检错、纠错条件[J]. 电子学报, 1988, 16(6):93-98 Dai Wenqi, Wang Jialong, Zeng Jianyu. The Error Detecting and Error-Correcting Conditions of the Range Ambiguities Solved by Chinese Remainder Theorem[J]. Acta Electronica Sinica, 1988, 16(6):93-98(in Chinese) |
| Cited By in Cnki (9) | |
| [2] |
戴文琪, 赵问道. 具有纠错能力的解距离模糊的模糊数法[J]. 电子学报, 1991, 19(2):127-129 Dai Wenqi, Zhao Wendao. The Methods Having Error Correcting Ability to Solve the Range Ambiguities[J]. Acta Electronica Sinica, 1991, 19(2):127-129(in Chinese) |
| Cited By in Cnki (7) | |
| [3] | Li X, Liang H, Xia X G. A Robust Chinese Remainder Theorem with its Applications in Frequency Estimation from Undersampled Waveforms[J]. IEEE Trans on Signal Processing, 2009, 57(11):4314-4322 |
| Click to display the text | |
| [4] | Wang Wenjie, Xia Xianggen. A Closed-Form Robust Chinese Remainder Theorem and its Performance Analysis[J]. IEEE Trans on Signal Process, 2010, 58(11):5655-5666 |
| Click to display the text | |
| [5] | Xiao L, Xia X G, Wang W. Multi-Stage Robust Chinese Remainder Theorem[J]. IEEE Trans on Signal Processing, 2014, 62(18):4772-4785 |
| Click to display the text | |
| [6] | Wang W J, Li X P, Wang W, et al. Maximum Likelihood Estimation Based Robust Chinese Remainder Theorem for Real Numbers and Its Fast Algorithm[J]. IEEE Trans on Signal Process, 2015, 63(13):3317-3331 |
| Click to display the text | |
| [7] | Li Wenchao, Wang Xuezhi, Wang Xinmin, et al. Distance Estimation Using Wrapped Phase Measurements in Noise[J]. IEEE Trans on Signal Process, 2013, 61(7):1676-1688 |
| Click to display the text | |
| [8] |
梁红, 张琦, 杨长生. 广义稳健的中国剩余定理及其在欠采样率下频率估计中的应用[J]. 电子与信息学报, 2010, 32(8):1802-1805 Liang Hong, Zhang Qi, Yang Changsheng. A Generalized Robust Chinese Remainder Theorem and its Application to Frequency Estimation with Undersampling[J]. Journal of Electronics & Information Technology, 2010, 32(8):1802-1805(in Chinese) |
| Cited By in Cnki (8) |
