

可展结构因其具有体积小、空间大、可由收缩状态展开成预先设定的展开状态并保持稳定构型的特点,而在航空、航天和建筑等领域具有广泛的应用前景。文中研究的剪式可展结构是杆式可展结构的一种,剪式铰是组成剪式可展结构的基本单元,由2个连杆经销轴连接成“X”型结构,具有运动收缩功能[1]。将剪式铰单元按照不同方式进行组合可以演变为多种具体形式的可展开折叠结构,如平面伸展臂、球面网格体系、四边形截面伸展臂等。
近年来,随着国际间航天工程的竞赛趋于激烈,对可展结构在运动过程中的动力学行为要求越来越高,迫切需要可以精确预测可展结构的动力学特性。剑桥大学Pellegrino教授[2]与欧洲航天局一起对两维和三维剪式结构为基本单元所组成的可展结构进行了设计和结构优化;C.J.Gantes[3]利用符号操作法完成了半球形可展结构的几何设计,并对符号操作法在可展结构几何设计方面的优势做出肯定;Langbecker T[4]关于可展开式剪式机构的运动特性及展开条件做了较深入的研究,建立了折叠方程用以分析平移、圆柱以及球副机构的展开过程;牛津大学Chen[5]和Gan等[6]研究了可展机构运动分析时的分叉现象,并以此解释了可展六边形环出现的突变现象。黄铁球等[7]采用间隙碰撞铰模型对含间隙可展结构在展开锁定后结构的动力学特性进行了仿真研究;陈向阳等[8]对六棱柱单元可展天线开展了结构设计研究;纪斌等[9]就非对称平面剪铰结构的展开过程进行了分析与仿真,讨论了非对称机构的展开条件,对加速度、速度等物理量的动力学特性进行数值仿真,但就约束反力对机构的影响没有做出充分讨论。
在工程领域,对称可展机构的应用更为广泛[10],但由于可展机构的单元数和运动副较多,导致机构的约束方程和动力学特性难以获得。基于此,本文从基本剪式铰单元出发,通过节点坐标较系统的阐述了剪式线性阵列可展结构的一种简便建模方法,所建立的运动约束方程可以扩展应用到任意单元个数的剪式线性阵列机构中,并采用一种高精度的直接违约校正方法[11]对系统的坐标和速度进行修正,避免了数值结果的发散。对剪式可展机构展开过程中约束反力、加速度等物理量的动力学特性做了深入研究,相对于非对称机构,表现出了对称机构在运动过程中的特殊性。
1 剪式对称阵列可展结构动力学模型与方程剪式铰单元由2个连杆经销轴连接而成,铰接点的位置可决定结构形态与展开运动模态等。两杆理论上共面,并在此面内绕销轴转动,剪式单元间的连接可通过单元端部节点铰接实现。现将n个剪式单元沿竖直线进行阵列,且相邻剪式单元之间通过运动副相连,可得到线性阵列组合可展结构。物理模型如图 1所示。
 |
| 图 1 剪式线性阵列可展机构 |
图中L、ρ、A分别为剪式单元的杆长、密度及横截面积。
1.1 剪式可展结构等效质量矩阵剪式线性阵列可展结构有等截面直杆2n个,节点4n个,则有12n个笛卡尔坐标量,称这12n个描述剪式可展结构空间位置的坐标集合为结构系统的位姿。则剪式结构中任意杆件的节点i-j的坐标矢量、速度矢量、节点力矢量如图 2所示
 |
| 图 2 杆单元节点坐标、速度、力 |
各矢量记为
对基本杆件单元,单元速度模式表示为 式中,N=[(1-β)I3 βI3];β=
 ;I3为3×3单位阵,x为单元局部坐标,l为杆件几何长度,u(x) 、v(x)、 z(x)为单元在整体坐标系下的速度分量。
则单元动能可以表示为[12]
式中,ρ为密度。当杆件截面A相等,密度ρ相同时,(3)式可写为
式中,Ve为单元体积,ρ为单元材料密度,
;I3为3×3单位阵,x为单元局部坐标,l为杆件几何长度,u(x) 、v(x)、 z(x)为单元在整体坐标系下的速度分量。
则单元动能可以表示为[12]
式中,ρ为密度。当杆件截面A相等,密度ρ相同时,(3)式可写为
式中,Ve为单元体积,ρ为单元材料密度,
 =(i j),Me为单元的等效质量矩阵,则由(4)式可得杆单元的等效质量矩阵为:
=(i j),Me为单元的等效质量矩阵,则由(4)式可得杆单元的等效质量矩阵为:

剪式线性阵列可展结构的展开收缩过程在平面内完成,则对于平面杆单元,其等效质量矩阵为

得到各杆件的等效单元质量矩阵后将其按照节点号组装叠加,就可得到系统的整体质量矩阵。
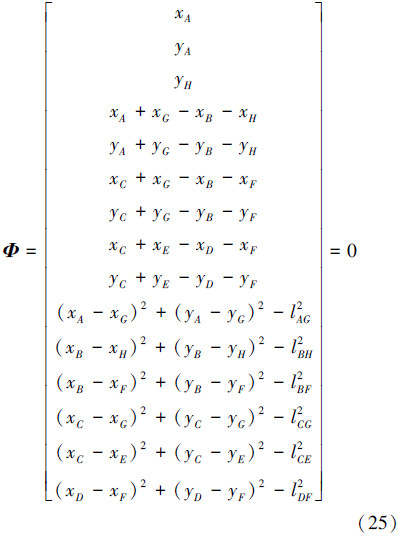
1.2 剪式可展结构约束方程剪式可展结构的几何约束主要包括3类:杆长刚性约束、剪式铰单元约束和边界条件几何约束。杆长刚性约束是指任意杆件ij在运动过程中长度保持不变,由图 2的位形描述可得任意杆件的杆长约束方程为

图 1所示剪式线性阵列结构有n个单元,则对应的杆长约束方程共有2n个,分别将各杆件节点号代入(7)式即可。
剪式铰单元为两直杆单元通过销轴在其间连接,杆可绕销轴在平面内转动,以图 1中第1个单元(由上往下)为例,根据刚体之间的基本约束关系,可建立平面任意单元剪式铰的约束方程为:
式中,xC、xE、xD、xF是剪式铰单元各端点的位置坐标,a、b、c、d分别指C、E、D、F各端点到销轴o的距离。剪式可展结构有n个剪式铰单元,相应的几何约束方程应为2n个。
图 1中剪式可展结构的A点和固定面铰接,H点具有沿x方向的自由度,则其对应的边界条件约束方程为:
为了便于数值计算,取各杆件的端点为系统坐标,则系统的位形坐标为q=(XAT … XHT)T,通过3类约束方程(公式(7)~(9))可将n个单元组成的剪式可展结构的约束关系表示为矩阵形式,即 1.3 剪式可展结构动力学方程
增广法与缩并法是研究机构动力学过程中两种较好的求解微分代数方程组的数值算法。由于缩并法是用独立的广义坐标表示非独立的广义坐标,导致缩并过程复杂,动力学方程不易求解[13]。本文采用增广法来建立剪式可展结构的动力学模型。
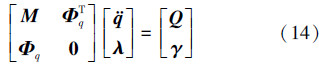
在获得剪式可展机构运动约束方程的基础上,可将该机构系统的运动方程表示为:
式中,M为质量矩阵;
 为约束系统的加速度矢量;Φq为Jacobian矩阵;λ为拉格朗日乘子矢量,该矢量对应机构的关节约束反力;Q为广义外力矢量。
为约束系统的加速度矢量;Φq为Jacobian矩阵;λ为拉格朗日乘子矢量,该矢量对应机构的关节约束反力;Q为广义外力矢量。
在动力学分析中,当约束方程和运动微分方程被同时考虑时,通过一组合适的初始条件才能获得方程的唯一解。因此,速度和加速度约束方程是必须的。将考虑转动副间隙的运动约束方程对时间t求一阶导数导出该机构的速度约束方程:
式中,
 是广义速度矢量,υ是速度方程右项,包含非定常约束方程相对于t求导产生的部分项。
是广义速度矢量,υ是速度方程右项,包含非定常约束方程相对于t求导产生的部分项。
将运动约束方程相对时间求二阶导数导出该机构的加速度约束方程:
式中,γ是加速度方程右项,是包含速度、位移和时间的函数。
在完整定长约束中,当约束方程Φ没有显含时间t时,方程(12) 中的Φt和方程(13)中的Φqt和Φtt将消失。结合方程(11)和方程(13)可导出系统的动力学方程为:
在数值积分过程中,由于所求解的是含加速度约束方程的微分方程组,因此求解的结果只满足加速度约束方程,但不一定能满足速度和位置约束方程。即在某时刻t可能存在:

对于多刚体系统,Baumgarte[14]提出约束违约稳定法,即在(14)式中引入修正因子衰减系统违约量α和β避免数值结果的发散,则将(14)式变为
) 式中,α、β是大于0的修正系数,一般α和β取值在5~50之间违约效果较好[15]。
约束违约法属于间接修正方法,不是对系统的广义坐标和广义速度直接进行修正使其满足约束方程的,因此在违约系数取值不理想的情况下,数值解在精确解的附近会有较大的振荡,不能确保将违约控制在给定的精度范围内。此外,违约稳定法在违约较小的情况下表现较好,从而在数值计算时需要较严格的数值精度。为了避免Baumgarte法的这些不足,现采用一种直接违约校正法进行处理。
设在t=ti时坐标为qi,若系统位置约束方程Φi=Φ(qi,ti)≠0,且违约超过了给定的精度范围,则引入δqi作为坐标qi的校正项,使qi=qi+δqi,则
由位置约束方程(10)可知其一阶变分为

则对(16)式作Taylor展开有

由(18)式可得

在未知量个数大于系统约束方程的个数时,Φq不是方阵,但可求得Φq的广义逆为Φq +(qi,ti)=ΦqT(qi,ti)(Φq(qi,ti)ΦqT(qi,ti))-1,此时可由(19)式得:

将求得的δqi代入qi=qi+δqi,位置坐标可得到校正。
设在t=ti时,对满足(10)式的坐标qi求导,将得到的速度qi代入速度约束方程式(11),若 i(q,,t)≠0,且其违约超过了给定的精度范围时进行修正。引入δ
i(q,,t)≠0,且其违约超过了给定的精度范围时进行修正。引入δ i作为速度qi的校正项,使i=qi+δi,则有
i作为速度qi的校正项,使i=qi+δi,则有


对Φq进行广义逆求解得

将δi代入i=i+δi,速度坐标得到校正。
3 算例分析与仿真结果在i时刻,根据qi和i计算系数矩阵和右函数Mi、Φqi与γi,通过求解方程(14)可以得到该时刻对应的加速度 i以及拉格朗日乘子λi。对i进行数值积分,可以得到下一时刻的位置qi+1以及速度i+1;将求得的qi+1及i+1代入公式(10)、(12),若在精度范围内,则继续进行下一步循环,若超过了精度范围,则通过公式(20)、(23)对其进行修正。根据R=-ΦqTλ可以求得可展机构在该位置相应的约束力。重复这一积分过程,可以完成剪式可展机构的动力学数值计算。
i以及拉格朗日乘子λi。对i进行数值积分,可以得到下一时刻的位置qi+1以及速度i+1;将求得的qi+1及i+1代入公式(10)、(12),若在精度范围内,则继续进行下一步循环,若超过了精度范围,则通过公式(20)、(23)对其进行修正。根据R=-ΦqTλ可以求得可展机构在该位置相应的约束力。重复这一积分过程,可以完成剪式可展机构的动力学数值计算。
将3组剪式基本单元沿y轴阵列,每组单元可绕中间的铰接点相互转动,相邻的剪式单元之间通过铰接进行连接,如图 3所示。
 |
| 图 3 线性剪式组合结构受力图 |
已知各杆件均匀等质,密度ρ=2 850 kg/m3,各杆长l=2 m,展开杆截面为矩形,截面宽b=0.02 m,高h=0.04 m,在H点施加轴向作用力F=-50 N。则由(6)式将剪式单元质量矩阵进行组装后可知系统的等效质量矩阵为
由(7)式~(10)式可知剪式可展结构的总约束方程为 已知初始时刻的位置矢量q(t0)和速度矢量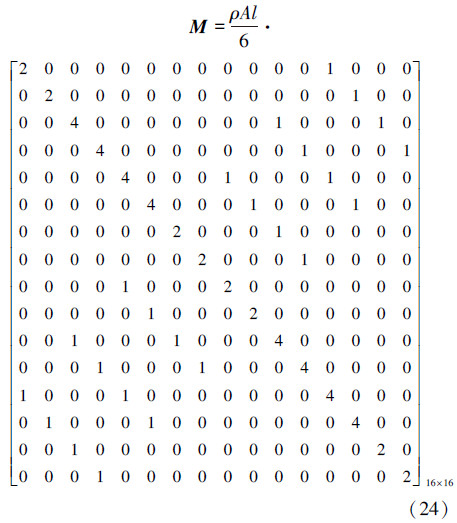
 (t0),采用变步长Runge-Kutta法完成动力学方程(15)的求解,由公式(20)、(23)完成位置和速度约束方程的校正,则由已知物理量可得剪式可展结构在展开过程中各杆件端点的位移、速度、加速度以及约束反力随时间的变化曲线,如图 4~图 7所示。
(t0),采用变步长Runge-Kutta法完成动力学方程(15)的求解,由公式(20)、(23)完成位置和速度约束方程的校正,则由已知物理量可得剪式可展结构在展开过程中各杆件端点的位移、速度、加速度以及约束反力随时间的变化曲线,如图 4~图 7所示。
 |
| 图 4 节点位置随时间变化曲线图 |
 |
| 图 5 节点速度随时间变化曲线图 |
 |
| 图 6 节点加速度随时间变化曲线图 |
 |
| 图 7 节点约束力随时间变化曲线图 |
由以上各图可知,剪式可展机构在端点H的y向自由度被约束且该节点受到沿x轴反向作用力的运动过程中,各节点运动规律比较复杂,但呈现出了阵列结构所特有的对称特性。由图 4~6可知,沿x轴方向,受力一侧各节点的速度和加速度逐渐增大,位移趋近于0;而非受力一侧各节点的位移、速度和加速度都趋近于0。沿y轴方向,剪式机构的对称特性表现较好,各对称节点具有一致的动力学特性(如A、H节点,B、G节点,C、F节点和D、E节点)。同时可看出,在t=0.8 s时,机构达到了临界状态,大于0.8 s后,剪式机构的几何特性将被破坏,在0~0.8 s过程中,速度和加速度的变化一致,位移则因初始展开角度较大导致变化不明显,但趋势是一致的。从图 7可以看出,在超过0.8 s后,机构运动几乎被完全破坏,但在这一时刻内,沿y轴方向相应节点的约束力依然保持着对称特性,表明线性阵列可展机构沿阵列方向抵抗破坏能力较强。
4 结论1) 根据剪式铰的基本约束关系,建立适用于任意单元个数的剪式线性阵列可展结构的动力学模型。采用一种直接违约校正法完成系统位置和速度的校正,有效的将约束方程的违约控制在给定的精度范围内,避免了由于违约系数的不合理取值导致的数值解在精确解附近的大幅振动;
2) 剪式阵列可展机构在展开过程中,沿y轴方向剪式机构具有一致的位移、速度、加速度和力变化,而沿x轴方向节点约束力的对称特性没有表现出来,这是由剪式机构的约束以及几何构型引起的。同时由图 6可知,在0.4 s之前节点沿x方向的加速度变化较平稳,而0.4 s以后加速度迅速增大,为了保证机构可以缓慢的展开,可减小节点H处的作用力或在节点D处施加沿y轴的反作用力;3) 以3单元剪式阵列可展机构为对象,研究了对称剪式机构的动力学特性。研究方法可以扩展应用到任意单元个数的剪式线性阵列可展机构中,研究结果可以为对称剪式机构的工程应用和制定展开过程的精确控制提供理论依据。
| [1] | 李 博, 王三民, 袁茹. 剪式单元直线阵列可展结构的稳定性[J]. 哈尔滨工业大学学报, 2014, 46(9):50-54 Li Bo, Wang Sanmin, Yuan Ru. Stability of Linear Array Deployable Structures Based on Structure of Scissor-Like Element[J]. Journal of Harbin Institute of Technology, 2014, 46(9): 50-54 (in Chinese) |
| Click to display the text | |
| [2] | Pellegrino S. Deployable Structures[M]. New York, USA: Springer, 2001 |
| [3] | Gantes C J. Deployable Structures: Analysis and Design[M]. Southampton, England: Wit Press, 2001 |
| [4] | Langbecker T. Kinematic Analysis of Deployable Scissor Structures[J]. International Journal of Space Structures, 1999, 14(1): 1-15 |
| Click to display the text | |
| [5] | Chen Yan, You Zhong, Tarnai T. Three Fold-Symmetric Bricard Linkages for Deployable Structures[J]. International Journal of Solids and Structures, 2005, 42: 2287-2230 |
| Click to display the text | |
| [6] | Gan W W, Pellegrino S. Numerical Approach to the Kinematic Analysis of Deployable Structures Forming a Closed LOOP[J]. Mechanical Engineering Science, 2006, 220: 1045-1056 |
| Click to display the text | |
| [7] | 黄铁球, 吴德隆, 阎绍泽. 带间隙伸展机构的非线性动力学建模[J]. 中国空间科学技术, 1999, 19(1): 7-12 Huang Tieqiu, Wu Delong, Yan Shaoze. Nonlinear Dynamic Modeling of Deployable Truss Structures with Clearances[J]. Chinese Space Science and Technology, 1999, 19(1): 7-12 (in Chinese) |
| Cited By in Cnki (35) | Click to display the text | |
| [8] | 陈向阳, 关富玲. 六棱柱单元可展天线结构设计[J]. 空间科学学报, 2001, 21(1):68-72 Chen Xiangyang, Guan Fuling. A Large Deployable Hexapld Paraboloid Antenna[J]. Chinese Journal of Space Science, 2001, 21(1): 68-72 (in Chinese) |
| Cited By in Cnki (17) | |
| [9] | 纪斌, 王怀磊, 金栋平. 非对称平面剪铰结构的展开过程分析与仿真[J]. 工程力学, 2013: 30(7): 7-13 Ji Bin, Wang Huailei, Jin Dongping. Analysis and Simulation of the Deployment Process for Asymmetric Planar Scissor Structures.[J]. Engineering Mechanics, 2013, 30(7): 7-13 (in Chinese) |
| Cited By in Cnki | Click to display the text | |
| [10] | Raskin I. Stiffness and Stability of Deployable Pantographic Columns[M]. University of Waterloo, 2000 |
| [11] | 于清, 洪嘉振. 受约束多体系统一种新的违约校正方法[J]. 力学学报, 1998, 30(3): 300-306 Yu Qing, Hong Jiazhen. A New Violation Correction Method for Constraint Multibody Systems[J]. Acta Mechanica Sinica, 1998, 30(3): 300-306 (in Chinese) |
| Cited By in Cnki (49) | Click to display the text | |
| [12] | 陈务军. 空间展开桁架结构设计原理与展开动力学分析理论研究[D]. 杭州: 浙江大学, 1998 Chen Wujun. Deployment Dynamic Analysis Theory and Design Principle Researches for Deployable Space Truss Structures[D]. Hangzhou: Zhejiang University, 1998 (in Chinese) |
| Cited By in Cnki (10) | |
| [13] | Fraczek J, Wojtyra M. On the Unique Solvability of a Direct Dynamics Problem for Mechanisms with Redundant Constraints and Coulomb Friction in Joints[J]. Mechanism and Machine Theory, 2011, 46(3): 312-334 |
| Click to display the text | |
| [14] | Baumgarte J. Stabilization of Constraints and Integrals of Motion in Dynamical Systems[J]. Computer Methods in Applied Mechanics and Engineering, 1972, 1: 1-16 |
| Click to display the text | |
| [15] | Muvengei O, Kihiu J, Ikua B. Numerical Study of Parametric Effects on the Dynamic Response of Planar Multi-Body Systems with Differently Located Frictionless Revolute Clearance Joints[J]. Mechanism and Machine Theory, 2012, 53: 30-49 |
| Click to display the text |