

风力发电、太阳能发电等新能源受天气影响大,如风速、风向、日照强度、日照时间等因素干扰,使得发出的电能有很强的间歇性和不确定性。这些新能源特点使得电源变化器输出稳定电压变得困难,输出精度难以保证。此时就需要一种具有鲁棒性的控制器。
滑模控制以其结构简单、对内部参数和外部扰动均不敏感的强鲁棒性得到了广泛应用。然而传统滑模控制由于自身控制律的离散型存在不可避免的抖颤问题,被控系统将出现高频振荡[1, 2],影响了滑模控制的效果,严重时甚至损毁控制系统。
高阶滑模是传统滑模的推广,是目前最为全面的、能够消除传统滑模的缺陷,并保持了传统滑模优点的方法。Aire Levant首先提出了高阶滑模控制的思想[3],并且系统地提出了几种二阶滑模(second order sliding mode,SOSM)控制算法并给出了控制精度估计。Fridman和Levant阐述了高阶滑模原理及应用并得到了国际控制界的广泛关注[4]。Bartolini教授和他领导的研究小组发表了一系列的关于二阶滑模理论与应用的研究成果[5]。Levant提出了基于super-twisting算法的二阶滑模微分器,极大地促进了高阶滑模理论和应用的发展[6]。Levant的贡献主要有2个方面:①在2001年提出了任意阶滑模控制[7];②于2003年提出了任意阶精确鲁棒微分器[8]。根据上述两点可以实现任意阶滑模输出反馈控制。Levant提出的super-twisting算法应用于系统的相对阶数为1的情形,不需要滑模变量的导数信息且控制律是连续的;Drift算法是针对离散系统提出来的;prescribed convergence law算法和Man等[9]所提出的终端滑模(terminal sliding mode,TSM)控制方法很相近,利用了传统滑模控制的思想,让系统的状态保持在一个适合的非线性滑模面上,能在有限时间内收敛到滑动集s==0,从而实现二阶滑模控制。Bartolini等[10, 11]基于双积分系统的时间最优控制推导出了sub-optimal(次优)算法。Shtessel等提出了一种渐近收敛的光滑二阶滑模(smooth second order sliding mode,SSOSM)控制方法,随后,又基于齐次性技术提出了另一类新型的光滑二阶滑模控制算法,该算法适用于拦截弹的制导律设计[12, 13]。Pan针对相对阶数为2的线性时不变连续系统,提出了一种渐近收敛的二阶滑模控制方法,并采用Lyapunov函数对稳定性进行了分析。Plestan等[14]在有限采样频率和只利用输出信息的情况下,提出了一种新的二阶滑模输出反馈控制方法,在存在不确定性和扰动时,实现了有限时间内对参考轨迹的高精度跟踪。
本文采用高阶滑模中的super-twisting 控制算法,并基于此算法设计了一种动态滑模控制器,将其应用于全桥逆变器当中。
1 全桥逆变器的建模全桥逆变器是一种把直流变交流的开关电源拓补结构。
主要由Q1~Q4,D1~D4以及LC低通滤波器组成:
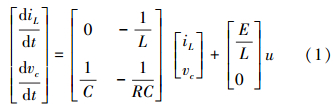
如图 1所示逆变桥由4个MOSFET管组成,分为2组,其中Q1和Q4为1组,Q2和Q3为1组,2组交替通/断,D1~D4是续流二极管,输出交流方波电压经LC低通滤波器后得到交流正弦输出电压。由于全桥型逆变器的输出滤波电容电压及其导数是连续可测的,可以取电容电压及电感上的电流作为系统的相变量来描述系统。系统的状态方程为:
 |
| 图 1 全桥逆变器的拓扑结构图 |
二阶滑模控制算法由于将离散控制律转移至更高阶的滑模面,消除了传统滑模控制中存在的抖振问题。super-twisting控制算法是二阶滑模控制算法的一种由两部分组成,第一部分为滑模面在时间上的积分,第二部分为滑模面的一个连续函数。
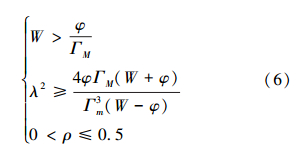
保证有限时间内收敛于滑模面原点的充分条件是[8]: 式中,W,ρ,λ和s0均为正常数。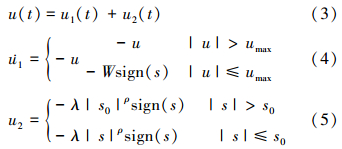
当系统与控制律u相关度r≥1时,控制器可以简化为:
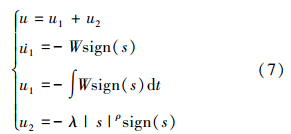
super-twisting算法并不需要任何有关滑模面在时间上的微分的信息。如果在(7)式中ρ取1,系统将达到一个指数稳定的二阶滑动模态,如果ρ取0.5,系统将最大可能实现二阶滑动模态。
对于全桥逆变器,采用二阶滑模super-twisting算法进行控制,分别设计全桥逆变器的切换函数s和滑动模态控制律u。
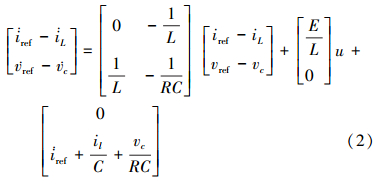
滑模存在的条件要求所有滑模面附近的状态轨迹都指向滑模面。因此,在(2)式确定的相平面上,选择通过原点的斜率为负的直线作为开关切换面,即:
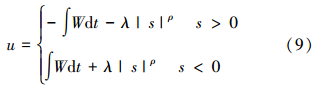
对于其控制率:u(t)=u1(t)+u2(t),即为u=∫-Wsign(s)dt-λ|s|ρsign(s)
所以控制算法为:
为了证明算法的收敛性,根据李雅普诺夫稳定性判据,构造正定函数

对该函数求导可得如下方程组:
式中:K=iref+iL/C+U/RC,在相平面中,(12)式表示2条平行线之间的区域。可以得到切换线上的滑模存在域满足以上2个不等式区域,将(8)式带入(12)式得: 式中:λ=k1/k2由于输入电压E和参考电压Vref是确定的通过选择参数λ,R,C,L可以得到不等式: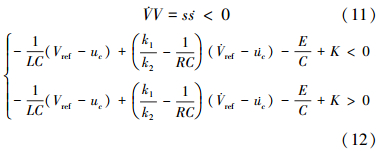
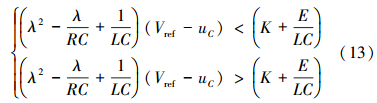

为了保证状态轨迹严滑模面稳定于坐标原点,就必须使滑模面包含向平面的原点。可得:

(15)式等效控制必须满足的条件u≤1得到的滑模区域。如给定输入电压E=24 V,滤波电感L=2.5 mH,滤波电容C=2.43μF,(8)式中的参数k1=0.01,参数k2=12,参考电压Uref=220sin2π50t(V),参考电流Iref=0.6sin2π50t(A)即可满足上述不等式,即 < 0。所以super-twisting算法在有限时间内是收敛的,即全桥逆变器能够满足稳定性的要求。
< 0。所以super-twisting算法在有限时间内是收敛的,即全桥逆变器能够满足稳定性的要求。
为了进一步验证算法的收敛性和有效性,本文对基于super-twisting算法的全桥逆变器进行了MATLAB仿真,系统所采用的输入电压为24 V,电感L=2.5 mH,电容C=2.43 μF,电阻R=40 Ω,输出给定电压Uref=280sin2π50t(V),Iref=0.6sin2π50t(A)。
根据已知参数建立的数学模型,二阶super-twisting滑模算法的s的相轨迹如图 2所示。
 |
| 图 2 super-twisting算法s滑模面相轨迹收敛曲线 |
从图中可以看出,经过一段时间,s和 收敛于原点,即满足s(x,t)=(x,t)=0的充分必要条件。
收敛于原点,即满足s(x,t)=(x,t)=0的充分必要条件。
为了更好地说明super-twisting算法的鲁棒性能和消抖性能,利用MATLAB进行,常态下高阶滑模与典型PI控制比较,并在输入扰动和负载扰动下与典型PI控制进行比较。
3.1 稳态性能比较测试当全桥逆变器在典型比例积分PI控制下,电压瞬时值为内环取比例系数Kp=2.4641×104,积分系数Ki=3.1,电压平均值外环取比例系数Kp=0.1,积分系数Ki=64.8。变换器输入电压为48 V,输出给定参考值为280 V,50 Hz。和高阶滑模super-twisting算法控制下的输出电压波形图:
通过对比图 3中的a)和b),高阶滑模的动态响应过程快,稳态时波形更加平滑,能够很好地跟踪参考电压,从而对于用电负载更加安全和高效。
 |
| 图 3 全桥逆变器输出电压波形 |
当负载从40 Ω到100 Ω变化时,如图 4a)所示,在0.05 s时,负载由100 Ω变化到40 Ω,在0.08 s时负载由40 Ω变化到100 Ω。全桥逆变器采用瞬时值内环和平均值外环的双环控制算法和高阶滑模super-twisting控制算法,得出如下电压波形。在图 4a)所示的负载扰动下,通过对比图 4中的b)和c),图 4b)中的典型PI调节,在0.05 s和0.08 s有明显波动。图 4c)中的高阶滑模控制对于外界的干扰不敏感,具有强的鲁棒性。并且反应速度快,仿真波形更加平滑,对于用电负载更加安全有效。
 |
| 图 4 负载扰动全桥逆变器输出电压波形 |
为了更近一步测试2种算法的效果。在MATLAB仿真中,对于输入电压如图 5a)所示变化,输入电压在0.02 s时从36 V变化到24 V,在0.04 s时,从24 V升到58 V,然后在0.06 s时,上升到72 V,在0.08 s时重新回到了36 V。这种输入电压的扰动模拟新能源发电中受天气因素的干扰所发出的电能具有随机性。全桥逆变器采用瞬时值内环和平均值外环的双环控制算法和高阶滑模super-twisting控制算法,得出如下电压波形。通过比较图 5b)和图 5c),在输入扰动频繁发生的情况下,典型PI调节完全不能满足跟踪电压,输出正弦波有畸变。而控制器使用高阶滑模super-twisting算法,该算法的强鲁棒性,对输入扰动的不敏感。图 5c)中可以清晰看出输出电压的正弦波较好。
 |
| 图 5 输入扰动电压下全桥逆变器输出电压波形 |
针对新能源发电中存在的随机性问题,本文设计了一种基于super-twisting算法的动态滑模控制器,并以全桥整流器为例与典型PI控制效果进行对比试验。仿真结果表明:1) 在常态下典型PI调节可以控制发出正弦波,而高阶滑模的动态效果更好。2) 在出现输入和负载扰动时,典型PI调节不能满足实际需要,而基于super-twisting算法的控制器能够利用其强鲁棒性的特性很好地满足实际需要。
本文所提出的无抖颤的高阶滑模逆变器得到了仿真验证,基于super-twisting算法的控制器设计为随机性能源发电的实际工程应用推广提供了理论基础和新的设计思路。
| [1] | Utkin V. Sliding Mode in Control and Optimization[M]. Berlin:Springer-Verlag, 1992 |
| [2] | Huangfu Y, Laghrouche S, Liu W, Miraoui A. A Chattering Avoidance Sliding Mode Control for PMSM Drive[C] //Proceedings of the 8th IEEE International Conference on Control and Automation, Xiamen,China, 2010:2082-2085 |
| Click to display the text | |
| [3] | Levant A. Higher Order Sliding Modes and Their Application for Controlling Uncertain Processes[D]. Institute for System Studies of the USSR Academy of Science, Moscow, 1987 |
| [4] | Fridman L, Levant A. Higher Order Sliding Modes as the Natural Phenomena of Control Theory[C] //Proceedings of the Workshop Variable Structure and Lyapunov Technique, Benevento, 1994:302-309 |
| [5] | Bartolini G, Pisano A, Punta E, Usai E. A Survey of Application of Second-Order Sliding Mode Control to Mechanical Systems[J]. International Journal of Control,2003, 76(9/10):875-982 |
| Click to display the text | |
| [6] | Levant A. Robust Exact Differentiation via Sliding Mode Technique[J]. Automatica, 1998, 34(3):379-384 |
| Click to display the text | |
| [7] | Levant A. Universal SISO Sliding-Mode Controllers with Finite-Tine Convergence[J]. IEEE Trans on Automatic Control, 2001, 46(9):1447-1451 |
| Click to display the text | |
| [8] | Levant A. Higher Order Sliding Modes, Differentiation and Output-Feedback Control[J]. International Journal of Control, 2003, 76(9/10):924-941 |
| Click to display the text | |
| [9] | Man Z, Paplinski A P, Wu H. A Robust MIMO Terminal Sliding Mode Control for Rigid Robotic Manipulators[J]. IEEE Trans on Automatic Control, 1994,39(12):2464-2468 |
| Click to display the text | |
| [10] | Bartolini G, Ferrara, A, Usai, E. Output Tracking Control of Uncertain Nonlinear Second-Order Systems[J]. Automatica, 1997, 33(12):2203-2212 |
| Click to display the text | |
| [11] | Bartolini G, Ferrara A, Usai E. Chattering Avoidance by Second-Order Sliding Mode Control[J]. IEEE Trans on Automatic Control, 1998, 43(2):241-246 |
| Click to display the text | |
| [12] | Shtessel Y B, Shkolnikov I A, Levant A. Smooth Second Modes:Missile Guidance Application[J]. Automatica, 2007, 43(8):1470-1476 |
| Click to display the text | |
| [13] | Shtessel Y B, Tournes C H. Integrated Higher-Order Sliding Mode Guidance and Autopilot for Dual-Control Missiles[J]. AIAA Journal of Guidance, Control, and Dynamics, 2009, 32(1):79-94 |
| Click to display the text | |
| [14] | Plestan F, Moulay E, Glumineau A, Cheviron T. Robust Output Feedback Sampling Control Based on Second-Order Sliding mode[J]. Automatica, 2010,46(6):1096-1100 |
| Click to display the text |