

近些年,关于各类航空航天器部件及系统的建模仿真已经趋近成熟。然而现有的建模仿真主要针对正常情况,针对故障的建模仿真很少。已有的故障仿真研究也主要是针对那些能够较容易获得详细模型的对象,而实际情况是要建立包含机械、力学、电学、热学等因素的详细模型非常困难,或者仅仅为了模拟某种故障而被迫陷入建立复杂模型的泥潭中,耗时耗力。本文提出在一般的中等复杂程度的仿真模型中,充分利用经验知识和已知的故障表现对故障模块和参数实施等效置换的方法来进行故障模拟,并以航空航天器中传统的液浮陀螺为例介绍故障建模及分析的实施过程。该方法极大地丰富了故障建模的范围,同时尽可能地减小建立复杂模型带来的工作量。
文献[1]指出,在加性故障或者可以转化为加性故障的前提下,可以通过构造外部信号的方式把故障注入系统,但并没有提供构造外部信号的方法。文献[2]针对航天器工程中的一部分典型故障进行分析与建模,结合经验给出数学公式并阐述其应用。文献[3, 4]分别从故障树和功能图的角度进行图形化定性故障分析,本文引入这种思想并结合文献[5]陀螺可靠性知识建立陀螺定性的故障模式,作为故障定量建模仿真的经验知识。
综上所述,故障建模的研究还比较初步,故障模拟范围非常有限,且方法缺少通用性。传统的故障注入,仅仅是在正常模型基础上注入有限个定常的故障参数,只能反映一部分参数级的突变故障。本文提出的故障等效置换模拟方法能够涵盖大多数故障,不受故障强弱或者快变缓变的限制。根据需要可以模拟单故障和多故障,已知故障和虚拟故障的影响。从参数级、模块级到系统级都能进行故障注入,实现各种类型故障的仿真模拟。
1 故障等效模型建立及其置换仿真方法 1.1 故障建模分析把故障表示成叠加形式[6]有利于运用控制理论分析,这种建模方式需要已知故障模型相对于正常模型的偏差。这些叠加形式的故障模型能反映系统在正常状态附近一定范围内的故障。有些“故障”能够等效成“扰动”,但二者本质不同。“扰动”是由系统外部环境或内部环境产生,与原系统信号呈现叠加关系。而“故障”是由系统本身异常导致,和系统机理紧密相关,与原系统信号呈现加性、乘性或其他复杂关系,甚至完全与原系统信号无关。
公式(1)和(2),是线性系统2种叠加形式的故障模型,无论是参数偏差ΔA,ΔB,ΔC,还是信号偏差p(t),q(t)都是很难建立或等效给出的,因为实际故障综合了加性、乘性和其他复杂关系。
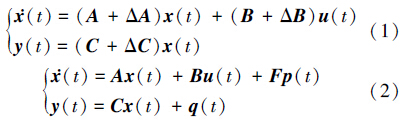
而如公式(3)的故障等效模型,其中的参数Af、Bf、Cf以及故障信号uf可以根据故障经验知识、故障测点信息和故障表现来建立或等效给出,因此采用等效置换的方式比叠加方式极大地扩展了故障模拟范围。

对于有些系统,x(t)=[xn(t) xf(t)]T又能细分为正常状态分量xn和故障状态分量xf。若能将二者独立开进行分析,则可以很大程度简化故障建模过程。在本文陀螺故障建模例子中,状态是非独立的。
1.2 故障等效模型置换方法在故障模拟过程中,本文按照故障等效置换的级别分为3种情况。
情况1:参数P等效置换(parameter substitution)。模型中特定模块内部的参数发生故障,将该参数的正常值置换成对应的故障值。
情况2:局部模块M等效置换(local module substitution)。模型中的特定模块发生故障,将该模块的正常输入输出模型置换成对应的故障模型,从而等效表示该模块的故障输入输出。
情况3:系统模型S等效置换(system model substitution)。发生系统故障时,直接将整个系统的正常输入输出模型置换成对应的故障模型,从而等效表示系统的故障输入输出。
3种情况按照使用优先级高低进行排序:参数置换>局部模块置换>整体系统模型置换。故障参数化是最准确的故障建模,其次是模块故障等效建模,不得已才使用系统故障等效建模。并非所有故障都能参数化表示,因此要综合使用多种方法。
由于是在仿真过程中实施故障等效模型置换,所以在故障发生时刻tf,需要将前一时刻相应故障级别的正常模型状态值作为置换后的故障等效模型状态初值继续仿真,实现连续过程的故障仿真。
 |
| 图 1 故障仿真框架 |
根据故障模式的经验知识,将故障等效模型又可以分为3种等效形式:1) 公式型等效:经过分析可以获取故障公式或已知故障模式的经验公式,则用数学代数式或微分方程建立故障等效模型,根据输入计算故障输出。2) 数值型等效:通过实验或者手册已知故障模式对应的数据曲线或表格,可以直接采用查表或者插值、拟合等方式进行数值等效置换。3) 规则型等效:若仅仅已知故障模式的描述,则根据描述建立逻辑规则,按照相应的判断条件直接给出故障输出。形如IF…THEN…公式型等效比较接近传统的建模方式,但不像传统建模那样严格,更多使用经验公式和简化的输入输出关系,例如模型系数受某些环境因素的影响通常呈现固定规律。数值型等效是为了充分利用实验数据,例如特定故障下的温度、电压、电流等实验数据可以用于反映该故障模式,从而避免建立复杂模型;规则型等效用于处理那些表达模糊的故障,通过设置逻辑规则直接作用到相关输出来反映这类故障的主要特征,例如输出不随输入改变。
1.3 故障等效建模与置换实施步骤明确故障等效模型置换思路之后,给出故障等效建模与置换实施步骤如下:
第1步 分析系统对象,合理划分模块。
第2步 建立系统和各模块的正常仿真模型,其模型精细程度由可获取的知识以及准备模拟的故障共同决定。
第3步 将所有可能的故障分类,用FTA(故障树分析)方法分清故障现象、中间故障、故障源,形成故障模式列表,便于故障建模。
第4步 所有故障经过匹配分析,对应到参数级、模块级和系统级,然后进行公式型、数值型或规则型等效建模,形成故障等效模型库。
第5步 确定需要模拟的故障模式,开始故障仿真,在设定的故障时刻实施故障等效模型置换,最后保存故障模拟结果。在故障建模过程中,模块故障知识表、系统故障知识表以及故障等效模型库都是随着对故障本身的认识逐渐深入而不断更新、不断扩充的。
2 液浮陀螺数学模型液浮速率陀螺原理:在输入轴方向敏感到角速度ωin时,由于马达转子角动量H的陀螺效应,在输出轴方向会产生陀螺力矩Hωin,浮子组件就会在该力矩作用下转动并产生进动角β,随之角度传感器产生一个正比于β的电压u,经过力反馈电路产生电流IT,输入到力矩器,产生力矩Mk来平衡陀螺力矩的作用。
本文根据液浮陀螺功能和常见故障将其划分成以下8个模块:马达转子、温控模块、浮子、角度传感器、力反馈电路、力矩器、输出电路、电源电路。其中8号电源电路模块和2号温控模块属于辅助模块,因为这2个模块输入到其他模块的是辅助信号(用虚线表示),并不包含控制回路信息。本文将频率源和激磁电源纳入电源模块,因此除了浮子模块不需要供电,其他模块都需要电源模块提供信号。
根据之前的工作原理分析和模块分解,建立液浮陀螺正常情况下的数学仿真模型如图 3所示。其中WH是马达转子角动量控制模型,保证转子角动量H恒定;WD是浮液温度控制模型,而温度主要影响浮子阻尼系数D,温度恒定则阻尼系数不变。J是浮子转动惯量,Ksg为角度传感器梯度,Ktg为力矩器刻度因数,Kout为输出系数;Ko为力反馈控制器,严格来说力反馈控制器应该是复杂的校正网络[7],这里为了便于分析故障而降低控制要求,故使用一般的比例控制。输入ωin是飞行器在该方向的角速度,输出ωout是陀螺测量到的角速度。
 |
| 图 3 正常模式陀螺仿真模型 |
取状态变量 ,将陀螺模型写成状态空间的形式如下
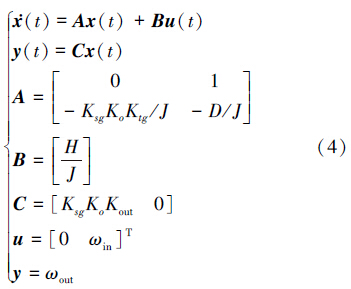
需要说明的是,β、us、IT、Mk、ωout这些信号都是受非线性饱和环节约束。
3 典型故障模式及相关经验知识故障的种类和严重程度千差万别,研究过程中很难涵盖所有情况,所以一般都是针对典型故障展开研究。现假设液浮陀螺部分模块的典型故障如表 1所示。
| 编号 | 模块名称 | 故障描述 |
| F-01 F-02 | 1马达转子 | 转子转速下降直至停转 摩擦增大导致转速偏差 |
| F-03 F-04 | 2温控模块 | 热电阻故障导致温度异常 温度下降至环境温度 |
| F-05 F-06 | 3浮子模块 | 温度变化导致阻尼系数变化 多余物导致浮子偏角不变 |
| F-10 F-11 | 7输出电路 | 电路失效无输出 输出不随输入变化 |
| F-12 F-13 | 8电源模块 | 电源整体供电失效 特定模块供电失效 |
通过陀螺模块的故障知识表,我们可以分析每个模块的故障,针对每种模块故障建立对应的等效模型。模块故障并非完全独立,它们按照图 2所示的模块关联相互影响。例如,F-13故障(已知电源模块中给温控部分供电失效)会导致F-04故障(温控失效,温度下降至环境温度),进而导致F-05故障(阻尼系数随温度变化)。而陀螺系统整体的角速度测量故障是由全部模块相互作用综合呈现出来。
 |
| 图 2 陀螺模块划分及影响关系 |
陀螺模块故障与陀螺系统故障之间的关系是故障传播导致的。如用图 4的故障树,就可以表明G-05故障(测量输出误差增大)的传播过程。这里F-13认为是温控模块供电失效。经过图分析可知,F-02、F-03、F-13是故障源,而F-04、F-05是传播导致的中间故障。
 |
| 图 4 故障树分析 |
每一个陀螺系统故障(表 2的G系列故障)都可以用故障树分析的方法来建立它与模块故障(表 1的F系列故障)或外部环境之间的关系。
| 编号 | 外部故障现象 | 故障原因 |
| G-01 | 无测量信号输出 | F-10, F-12, F-13 |
| G-02 | 输出测量值恒为0 | F-13 |
| G-03 | 输出非零固定值 | F-06, F-11 |
| G-04 | 相对于正常情况以固 定规律输出测量值 | F-01,F-02 |
| G-05 | 输出误差增大 | F-02,F-03,F-04,F-05, F-13 |
正常情况下,公式(4)仿真模型各参数取值[7]如下:J=0.1×10-4 kg·m2,D=55×10-4 Nms,H=0.02 Nms,Ksg=28.6 V/rad,Ktg=1.568×10-2 N·m/A,Ko=0.5 A/V,Kout=0.784 rad/s/A。输入为幅值2.5°/s的正弦激励。
4.1 温控模块故障的等效模拟按照完整陀螺模型的要求,必须建立准确的温控模型,这需要对详细的热力学过程进行建模[8],非常复杂。而如果仅仅模拟陀螺因温度下降故障(表 1的F-04故障)而引起的角速度测量故障(表 1的G-05故障),那么就只需要故障后温度下降曲线以及温度与陀螺参数的对应关系即可。这些无论是利用已有的实验数据,或者是经验公式都比较容易获得。本文给定温度下降曲线如图 5所示。
 |
| 图 5 浮液温度下降曲线 |
液浮陀螺的浮液温度T主要对浮子阻尼系数D产生影响,温度T与阻尼系数D关系可由经验公式(5)给出

D′是变化前对应温度T′的阻尼系数,D是变化后对应温度T的阻尼系数。给定变化前参考温度T′=60℃,对应的阻尼系数D′=55×10-4 Nms。
从0时刻注入故障。由图 6中可以看出温度下降故障会造成角速度输出误差幅值不断增大。而正常情况下,输出误差幅值应该是稳定的。
 |
| 图 6 温度下降故障仿真结果 |
由公式(4)可知,温控故障引起的阻尼系数D变化对应公式(3)模型中Af故障,而且仿真结果表明这是一种弱故障,因此难以转化成外部加性故障。
4.2 输出模块故障的等效模拟若输出不随输入变化(表 1的F-11故障),通常都是输出电路故障导致。模拟该故障只需根据故障现象设置故障规则进行等效模拟,而不必建立复杂的电子线路模型。这里输出电路故障规则是一旦发生故障就锁定tf时刻输出值,如公式(6)所示。
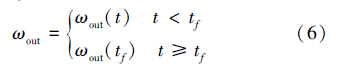
给定从24 s注入故障,仿真结果如图 7所示。可以看出故障发生后,输出角速度ωout固定在故障时刻的值,而不随输入角速度变化而变化。
 |
| 图 7 输出模块故障仿真结果 |
如果发生马达转子故障(表 1的F-01故障),转子角动量H就会逐渐下降,陀螺效应就会减弱。模拟该故障对陀螺测量值的影响不必建立详细的转子电机模型,而只须给定故障后对应转子转速下降的角动量H的数值即可,通过转子电机实验或简化的电机仿真分析都不难获得。角动量H持续下降会导致陀螺效应失效,最后的角速度输出失去意义,仿真结果在此省略。由公式(4)容易看出,转子角动量H下降故障对应公式(3)模型中Bf故障。
通过以上3个故障仿真实例可以看出,温度控制模块故障建模使用到数值型等效和公式型等效,角动量下降故障建模使用了数值型等效,而输出模块故障建模使用的是逻辑规则型等效。
5 结 论本文提出一种基于等效模型置换的故障建模方法。该方法首先根据对象原理对系统划分模块,结合故障树分析方法,把故障模式和参数级、模块级、系统级这3级故障体系进行归类匹配,然后通过故障等效建模形成故障等效模型库。本文通过液浮陀螺的故障建模及仿真实例来验证该方法的有效性,这些通过故障建模仿真得到的故障状态下的输出信号特性曲线,可以用于诊断部件是否故障以及故障类型和故障程度,为故障诊断和状态评估提供重要依据。
目前,各个领域的故障建模都没有行之有效的方法,本文的故障等效建模方法打开了一种可行的思路,对于一般系统的故障建模也具有指导作用。利用该方法模拟出的故障信号对于部件和系统故障检测以及部件生产中的可靠性分析都具有非常重要的意义。
| [1] | Gertler J. Analytical Redundancy Methods in Fault Detection and Isolation[C]//IFAC Symposia, USA, 1991:9-21 |
| Click to display the text | |
| [2] | 欧阳高翔,倪茂林,孙承启,等.航天器的故障建模与应用[J].航天控制,2011, 29(5):22-29 Ouyang G X, Ni M L, Sun C Q. The Fault Modeling and Application to Aerospace Engineering[J]. Aerospace Control, 2011, 29(5):22-29(in Chinese) |
| Cited By in Cnki (4) | Click to display the text | |
| [3] | Barua A, Sinha P, Khorasani K, et al. A Novel Fault-Tree Approach for Identifying Potential Causes of Satellite Reaction Wheel Failure[C]//Proceedings of the 2005 IEEE Conference on Control Applications, Toronto, Canada, 2005:1467-1472 |
| Click to display the text | |
| [4] | Ferrell B, Lewis M, Perotti J, et al. Functional Fault Modeling Conventions and Practices for Real-Time Fault Isolation[C]//Space Ops 2010 Conference, Alabama, USA, 2010:1-9 |
| Click to display the text | |
| [5] | 韦俊新,张俊,刘德均.液浮陀螺仪可靠性技术分析[J].中国惯性技术学报,2004, 12(4):57-64 Wei J X, Zhang J, Liu D J. Technique Analysis on Reliability of Liquid-Floated Gyro[J]. Journal of Chinese Inertial Technology, 2004, 12(4):57-64(in Chinese) |
| Cited By in Cnki (18) | Click to display the text | |
| [6] | Marcos A, Gabriele D Z, Luis F P. Simulation-Based Fault Analysis Methodology for Aerospace Vehicles[C]//AIAA Guidance, Navigation and Control Conference and Exhibit, Hawaii, USA, 2008:1-15 |
| Click to display the text | |
| [7] | 孙宝祥,何传五,李铁寿.速率积分陀螺的数学模型和常值漂移的在轨标定[J].航天控制, 1999,(4):58-62 Sun B X, He C W, Li T S. The Mathematical Model and On-Orbit Calibration of the Constant Drift of the Rate Integrating Gyro[J]. Aerospace Control, 1999,(4):58-62(in Chinese) |
| Cited By in Cnki (6) | Click to display the text | |
| [8] | 杨晔.液浮速率积分陀螺温控模型分析和参数设计[J].中国惯性技术学报, 1998, 6(1):35-40 Yang Y. Model Analysis and Parameter Design for Temperature Control System of Liquid Floated Rate Integrating Gyro[J]. Journal of Chinese Inertial Technology, 1998, 6(1):35-40(in Chinese) |
| Cited By in Cnki (3) | Click to display the text |