

2. 航天飞行动力学技术重点实验室, 陕西西安 710072
吸气式组合发动机是未来空天飞行器推进系统重要的发展方向,以火箭基组合循环发动机(RBCC)和涡轮基组合循环发动机(TBCC)为动力的空天飞行器正逐渐成为世界各航天大国的研究热点[1, 2, 3]。由于吸气式组合发动机的性能与飞行器的飞行状态紧密耦合,因此合理设计吸气式空天飞行器的爬升轨迹十分重要。当飞行器从地面水平起飞时,合理的爬升轨迹既能使发动机的性能达到最佳,又能满足一定爬升率的要求;当飞行器爬升到一定高度和速度后,即动压达到一定值后,为保证吸气式发动机的稳态工作,一般要进行等动压爬升。文献[4]利用飞行中的动压与所需动压的关系提出了3种实现等动压轨迹控制的方法,设计参数均以优化得以实现。文献[5]通过建立RBCC飞行器的马赫数-动压参考曲线,利用二分法迭代攻角跟踪参考曲线来实现爬升轨迹的设计。文献[6]提出了一种等动压爬升的迭代方法。这些设计方法能够实现吸气式飞行器的爬升轨迹设计,但是没有充分考虑吸气式飞行器爬升过程中的约束,且设计过程大多采用优化和迭代的方法得到参考爬升轨迹,设计过程复杂。本文针对吸气式组合动力飞行器,提出一种考虑多种约束的主动段爬升轨迹设计方法。该方法通过在高度-速度(H-V)设计域内表述各种约束的边界,然后在约束边界内设计出满足约束和爬升要求的参考轨迹,完成参考轨迹的设计。在此基础上,利用反馈线性化的方法实现参考轨迹的跟踪。
1 飞行器动力学模型及约束 1.1 吸气式飞行器飞行剖面吸气式动力飞行器从地面起飞,然后加速爬升到一定高度和速度。当飞行器的动压达到一定值后,为了保证发动机的稳态工作,飞行器通常按照等动压爬升;等动压加速爬升过程中,飞行器所受热流密度逐渐增加,为了不超过热流约束,当热流达到其最大约束时,飞行器按照某一等热流线继续爬升。因此,飞行器的爬升过程可以分为3个阶段:起飞爬升段、等动压爬升段和等热流爬升段。飞行剖面如图 1所示。
 |
| 图 1 吸气式飞行器的飞行剖面 |
不考虑地球旋转和地球曲率,吸气式飞行器在纵向对称平面内的质心运动方程组如(1)式所示。
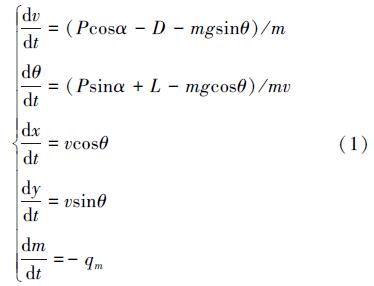
式中:m为飞行器的质量;qm为发动机的秒流量;v为飞行速度;α为攻角;θ为弹道倾角;P为发动机推力;D是阻力;L是升力;x和y分别代表飞行器的航程和高度。
1.3 爬升轨迹约束在吸气式组合动力飞行过程中,考虑到飞行器铰链力矩、翼面载荷以及发动机工作条件,需要对动压进行限制;考虑到结构承载需要对过载予以约束;此外,还需要限制最大热流密度以保证飞行不超过热防护系统的设计约束。这些设计约束是爬升轨迹设计过程必须考虑的因素。
1) 热流密度约束:

式中:C1为与飞行器特性相关的参数,Rd为飞行器头部曲率半径,ρ为来流密度,ρ0为海平面大气密度,vc为环绕速度。采用按指数变化的近似大气密度模型,密度随高度变化的函数为:

式中,h为高度,β=6700。
将(3)式代入(2)式,可得在热流密度约束时高度的下边界:

2) 动压约束:


3) 总过载约束:

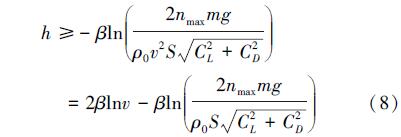
式中:CL和CD分别为升力系数和阻力系数,S为飞行器参考面积。
4) 控制约束:
除上述约束外,考虑到飞行器的机动能力和吸气式发动机的工作条件,需要满足:
2 轨迹设计
依照吸气式组合动力飞行器飞行包线的划分,考虑飞行约束,分别设计起飞爬升段、等动压爬升段和等热流爬升段的爬升轨迹,并采用反馈线性化的方法推导了轨迹的制导跟踪律。
2.1 等动压段动压的表达式为:

将(3)代入(10)式可得动压的表达式:

等动压飞行过程中,动压的变化率为零,因此:
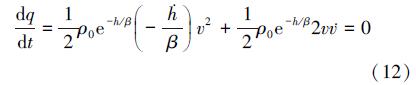
化简(12)式。

设等动压飞行的初始速度为v1,初始高度为h1,则在区间[v1,v]上积分(13)式。

设此时所需要满足的等动压为qe,则h1,v1同样满足(11)式,将此关系代入(14)式。

令 ,则参考轨迹曲线为:
,则参考轨迹曲线为:

从上述推导可以看出,当密度采用指数模型,并且高度和速度飞行包线满足(16)式时,就可保证飞行器按照等动压方式爬升。
2.2 起飞爬升段起飞爬升段是从地面起飞动压逐渐增加的过程,考虑到整个轨迹的光滑与连续性,起飞爬升段采用(17)式的轨迹形式。

式中: ,f(v)为以v为自变量的多项式,ci为待定系数,n为所设计曲线的约束条件数目。本文为了达到与爬升轨迹较符合的效果,f(v)选择三次曲线。ci的确定需要4个条件:
,f(v)为以v为自变量的多项式,ci为待定系数,n为所设计曲线的约束条件数目。本文为了达到与爬升轨迹较符合的效果,f(v)选择三次曲线。ci的确定需要4个条件:
1) 爬升起始点的高度和速度已知,即(v0,h0)已知;
2) 爬升起始点 已知;
已知;
3) 与等动压段的交接点处高度和速度已知,即(v1,h1)已知;
4) 与等动压段的交接点 已知;
已知;
由4个条件可得以下方程组:
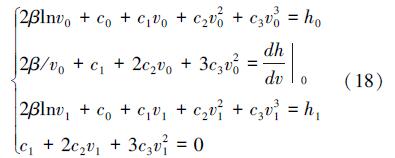
方程组(18)闭合可解,至此,起飞爬升段的爬升轨迹设计完成。
2.3 等热流段与等动压爬升同理进行推导,热流变化率为零,则:

化简(19)式。

设等热流密度为 ,对(20)式积分整理得:
,对(20)式积分整理得:

式中, 。当爬升轨迹满足(21)式时,可以实现等热流爬升。
。当爬升轨迹满足(21)式时,可以实现等热流爬升。
该制导方法利用线性反馈控制方法计算得到跟踪参考轨迹的攻角指令,并根据h和 的误差调整攻角,制导指令为:
的误差调整攻角,制导指令为:

式中

起飞爬升段:
等动压段:

等热流段:
式中:Lα为升力对攻角的偏导数。khd和kh为调节系数,可取khd=2ζωn,kh=ωn2,ζ为阻尼系数,可取为0.7,ωn为自然频率,可根据飞行器实际控制能力确定。
4 轨迹仿真及分析现以某水平起飞TBCC飞行器为例对本文所述方法进行仿真分析。该飞行器参考面积为0.27 m2;初始质量为1 600 kg;升力系数和阻力系数分别如图 2和图 3所示。飞行终止条件为Ma=4。发动机全加力状态推力模型的拟合公式为:
 |
| 图 2 TBCC飞行器升力系数 |
 |
| 图 3 TBCC飞行器阻力系数 |
给出飞行器的约束条件:qmax为60 kPa; 为240kw/m2;给出总过载约束:nmax=2.5;依据(4)式、(6)式和(8)式可得满足约束的高度下边界如图 4所示。
为240kw/m2;给出总过载约束:nmax=2.5;依据(4)式、(6)式和(8)式可得满足约束的高度下边界如图 4所示。
 |
| 图 4 轨迹约束边界 |
由图 4不难发现,在初始阶段过载和动压为主要约束;随着速度的增加,气动加热越来越严重,热流密度将成为确定高度下边界的主导约束。图中A点为热流密度边界和动压边界的交点。
4.2 轨迹仿真由于水平起飞,本例中设计的H-V曲线的初始高度h0=0,初始速度v0=120 m/s, 。设等动压爬升段的动压选为qe=40 kPa,等动压爬升的起始高度选为h1=8 000m,则起始速度v1=390.06 m/s。由(18)式可得起飞爬升段的参考轨迹如(25)式;等动压段的参考轨迹如(26)式。
。设等动压爬升段的动压选为qe=40 kPa,等动压爬升的起始高度选为h1=8 000m,则起始速度v1=390.06 m/s。由(18)式可得起飞爬升段的参考轨迹如(25)式;等动压段的参考轨迹如(26)式。


根据(26)式进行等动压飞行,在达到飞行终止条件前,热流密度会超过最大允许约束,因此为了满足热流约束,在达到最大热流约束前按等热流飞行。等热流爬升段的热流选为=230 kW/m2,等热流段的参考轨迹如(27)式所示。全部参考轨迹及约束如图 5所示。

 |
| 图 5 设计的参考爬升曲线 |
采用该参考轨迹及本文所述的制导律实现飞行器的爬升过程仿真,仿真结果如图 6至图 8。
由图 6可以看出,本文所采用的制导方法可以实现参考轨迹的良好跟踪,迎角指令保持在±5°内(图 7),满足控制约束。图 8中的动压曲线在起飞爬升段动压快速增加,等动压飞行段动压保持不变,而在等热流段动压逐渐减小;等热流段动压的减少可能导致空气捕获量减少,进而带来发动机而推力下降。但动压减少的同时阻力也必然减小,因而不会带来推力不足的问题。从起飞段开始随着爬升速度越来越大,热流密度在前两个飞行段逐渐增加,直到等热流段保持不变。图 7和图 8表明爬升过程满足各种约束,飞行器可以按照预定规律爬升,最终完成飞行任务。
 |
| 图 6 参考轨迹的跟踪结果 |
 |
| 图 7 跟踪参考轨迹的迎角指令 |
 |
| 图 8 参考轨迹跟踪的动压和热流密度曲线 |
本文针对吸气式飞行器提出了一种轨迹设计方法,依据飞行过程特点将飞行过程分段,在满足多约束的条件下,合理地设计爬升轨迹以实现飞行器的加速爬升。该方法具有设计灵活,直观性强和良好跟踪性等优点,并能够适用于吸气式组合动力飞行器多种爬升轨迹的设计,但还不能完成最省燃料爬升以及最短时间爬升等具有最优性条件的爬升轨迹设计,这将是本文后续的一项工作。
| [1] | 刘洋, 何国强, 刘佩进, 等.RBCC组合循环推进系统研究现状和进展[J].固体火箭技术, 2009, 32(3): 288-293 ,Liu Yang, He Guoqiang, Liu Peijin, et al. Present Situation and Progress of Investigation on Rocket Based Combined Cycle(RBCC) Propulsion System[J]. Journal of Solid Rocket Technology, 2009, 32(3): 288-293 (in Chinese) |
| Cited By in Cnki (15) | Click to display the text | |
| [2] | 王巍巍, 郭琦, 曾军,等.国外TBCC发动机发展研究[J].燃气涡轮实验与研究, 2012, 25(3): 58-62,Wang Weiwei, Guo Qi, Zeng Jun, et al. TBCC Technology Research Abroad[J]. Gas Turbine Experiment and Research, 2012, 25(3): 58-62 (in Chinese) |
| Cited By in Cnki (8) | Click to display the text | |
| [3] | 陈宏, 何国强.RBCC和TBCC组合发动机在RLV上的应用[J].火箭推进, 2008, 34(3):39-43 ,Chen Hong, He Guoqiang. Application of RBCC and TBCC Engines to RLVs[J]. Journal of Rocket Propulsion, 2008, 34(3): 39-43 (in Chinese) |
| Cited By in Cnki (9) | Click to display the text | |
| [4] | Olds J R, Budianto I A.Constant Dynamic Pressure Trajectory Simulation with POST[R].AIAA-1998-0302 |
| Click to display the text | |
| [5] | 吕翔, 何国强, 刘佩进.RBCC飞行器爬升段轨迹设计方法[J].航空学报, 2010, 31(7): 1331-1337,LÜ Xiang , He Guoqiang, Liu Peijin. Ascent Trajectory Design Method for RBCC Powered Vehicle[J]. Chinese Journal of Aeronautics, 2010, 31(7): 1331-1337 (in Chinese) |
| Cited By in Cnki (11) | Click to display the text | |
| [6] | 薛瑞, 胡春波, 吕翔, 等.两级入轨RBCC等动压助推弹道设计与推进剂流量分析[J]. 固体火箭技术, 2013, 36(2): 155-160,Xue Rui, Hu Chunbo, LÜ Xiang, et al. RBCC Constant Dynamic Pressure Booster Trajectory Design and Propellant Mass Flowrate Analysis for TSTO Transportation System[J]. Journal of Solid Rocket Technology, 2013, 36(2): 155-160 (in Chinese) |
| Cited By in Cnki (4) | Click to display the text | |
| [7] | 闫晓东, 贾晓娟, 吕石.RBCC动力飞行器等动压爬升方法[J]. 固体火箭技术, 2013, 36(6): 711-714 ,Yan Xiaodong, Jia Xiaojuan, LÜ Shi. A Ascent Trajectory Design Method with Constant Dynamic Pressure for RBCC Powered Vehicle[J]. Journal of Solid Rocket Technology , 2013, 36(6): 711-714 (in Chinese) |
| Cited By in Cnki (1) | Click to display the text |
2. Science and Technology on Aerospace Flight Dynamics Laboratory, Northwestern Polytechnical University, Xi'an 710072, China