

无人机在现代战争中是一种重要的军事装备,除了能够执行传统的侦察、巡逻等任务外还能够在危险环境中执行任务。先进的飞控系统能够提高无人机在复杂环境下执行任务的能力,对于提高其战斗效能具有重大意义。
由于在飞行过程中可能发生飞机模型参数的变化,以及纵向与横航向之间出现耦合。这对飞行控制系统的设计提出了挑战。传统控制方法中,主要的线性方法是PID、LQR等;非线性方法主要有QFT、自适应控制方法等。线性方法(如PID)增益调参是针对线性系统的,当系统存在时变参数时增加了调参的难度,且难以保证控制效果。非线性控制方法中传统的自适应控制(如MRAC)能够在系统存在不确定性时,使系统的跟踪误差渐渐收敛。但该方法在瞬态状态下,系统容易出现控制输入高频振荡,当自适应速率较小且自适应增益增大时,易于引发模型的未建模动态等缺点。
针对这些不足,Cao Chengyu和Naira Hovakimyan在2006年首先提出了L1自适应控制方法[1],其特点是在传统的模型中引入自适应控制机制的基础上进行改进演化,通过引入低通滤波器与增大自适应增益来保证系统渐进稳定的同时,具有良好的鲁棒性与系统快速自适应。本文在深入探讨L1自适应控制机理的基础上,构建了小型无人机横侧向滚动角控制系统,即将飞行包线内飞机模型参数的变化视为不确定性因素,设计L1自适应控制器进行仿真。
1 L1自适应控制基础理论 1.1 L1自适应控制的系统结构本文以状态反馈的方式来设计L1自适应控制器,即通过增加一个低通滤波器将自适应性能与鲁棒性分成两个独立的部分。系统主要由4部分组成,包括被控对象、状态估计器、自适应律、控制器。其中,状态估计器用于估计和监视模型的状态及其变化;自适应律用来调整需要估计的参数;而控制器则由初步控制律和低通滤波器组成,初步控制律根据自适应律提供的经调整后的参数和给定的跟踪信号及时调整控制信号;最后低通滤波器将控制量中的高频信号滤掉,将低频信号加到实际系统,以实现既定性能。该结构将估计环与控制环解耦,这种解耦的好处是允许任意增加估计率,而仅受到硬件条件的限制,如CPU时钟频率等。L1自适应控制系统结构如下图 1所示。
 |
| 图 1 L1自适应控制系统结构示意图 |
定理1 渐进稳定系统与严格单输入单输出系统的L1增益为[1]:

式中,h(t)为H(s)的脉冲响应。
定理2 对于渐进稳定系统与严格m个输入,n个输出的系统,其L1增益为[1]:

式中,Hij(s)为H(s)中的元素。
推论1 对于渐进稳定系统与严格多输入多输出系统,设输入为r(t)∈Rm,输出为x(t)∈Rn,则当t≥0时,有[3]:

引理1 对于串联系统H(s)=H1(s)H2(s),其中H1(s),H2(s)为渐进稳定系统,则有[2]:

定理3 (L1小增益定理)[1],对于输入为ζ1(t),输出为ζ2(t)的相互耦合系统,ζ2(s)=Δ(s)(ζ1(s)-M(s)ζ2(s)),如果有‖M(s)‖L1‖Δ(s)‖L1 < 1,则系统渐进稳定。
2 L1自适应控制设计可按如下的步骤完成无人机横侧向L1自适应控制系统。
1) 构建下面的飞机系统不确定数学模型:
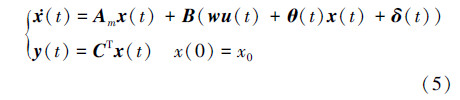
式中:x(t)∈Rn为可观测的系统状态向量;u(t)∈Rm为控制信号;y(t)∈Rm为系统输出;B,C∈Rn×m为已知的常数矩阵;Am∈Rn×n为已知系统矩阵(为Hurwitz矩阵),且有(Am,B)可控;w∈Rm×m是未知、非奇异矩阵;θ(t)∈Rm×n为时变未知参数矩阵;δ(t)∈Rm是时变干扰;且设定未知参数[3]的范围(t≥0):

令H0(s)=CTH(s),H(s)=(sI-Am)-1B,且假定H0 -1(s)的极点均位于左半平面。而系统的控制目标是设计一控制器,无论是暂态还是稳态,都能使系统的输出y(t)跟踪上给定的有界连续参考信号r(t)∈Rm,给出参考模型为:

式中:Kg=-(CTAm-1B)-1∈Rm×m,是一常数矩阵。
2) 设计状态观测器:
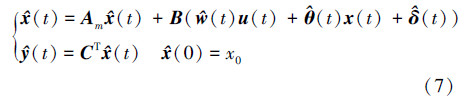
式中:  (t)、?(t)、
(t)、?(t)、 (t)、
(t)、 (t)分别是对x(t)、w(t)、θ(t)、δ(t)的估计值,x0为初始状态。
(t)分别是对x(t)、w(t)、θ(t)、δ(t)的估计值,x0为初始状态。
3)自适应律设计[1]:
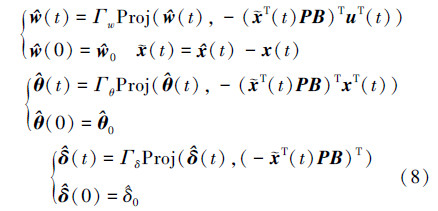
?0、 、
、 分别为w(t)、θ(t)、δ(t)的估计初值;Γw=Γθ=Γδ=ΓcIm×m,其中,I表示单位矩阵,Γc∈R+为自适应增益,Γc与
分别为w(t)、θ(t)、δ(t)的估计初值;Γw=Γθ=Γδ=ΓcIm×m,其中,I表示单位矩阵,Γc∈R+为自适应增益,Γc与  (t)的边界成反比,这意味着增大Γc,可以提高系统的跟踪精度[4];P=PT>0,是李雅普诺夫方程AmTP+PAm=-Q的解,其中Q=QT>0;Proj(·,·)为投影算子。
(t)的边界成反比,这意味着增大Γc,可以提高系统的跟踪精度[4];P=PT>0,是李雅普诺夫方程AmTP+PAm=-Q的解,其中Q=QT>0;Proj(·,·)为投影算子。
4) 控制器:
控制量为[5]:

式中:r(s)和u(s)分别是r(t)和u(t)的拉氏变换,K∈Rm×m是反馈增益,D(s)是一严格正则的、m×m的传递函数矩阵。r(t)由下式定义

式中,r(t)为参考输入,s为t在频域中对应的变量。
设C(s)=wK(I+D(s)wK)-1D(s),式中K和D(s)的选择必须满足下列条件[5]:
1) C(s)严格正则、稳定,且C(0)=I;
2) C(s)H0-1(s)正则且稳定;
3) ‖G(s)‖L1L < 1;其中[6]:
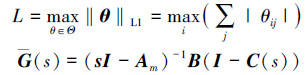
下面,需要详细说明K和D(s)的选择过程:
若为简单起见,选取D(s)= ·Im×m,则C(s)为:
·Im×m,则C(s)为:

由(11)式可以直接推出I-C(s)的脉冲响应是Iσ(t)-wKe-wKt,其中σ(t)为脉冲函数。令λmax(-wK)为Hurwitz矩阵-wK的最大特征值。如果K的选择可以使λmax(-wK)无穷小,那么-wKe-wKt就能任意接近脉冲函数Iσ(t),因此有[5]:

于是可知

假定w是对角阵,那么K的设计就很简单了。假定对角元素wi(i=1,2,…,m)是已知的,那么,K的选择原则是[6]:K为对角阵,且对角线上第i个元素Ki与wi具有相同的符号,则易知C(s)亦为对角阵,其第i个元素为:
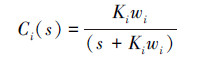
图 1所示的L1自适应控制系统结构可具体化如图 2所示:
 |
| 图 2 L1自适应控制系统结构图 |
首先,对塞斯纳某型飞机在高度h=2 000 m,速度30 m/s的状态下配平得到飞机的横侧向数学模型  =Ax+Bu,选定x=[β p r φ],u=[δa δr],则计算有:
=Ax+Bu,选定x=[β p r φ],u=[δa δr],则计算有:
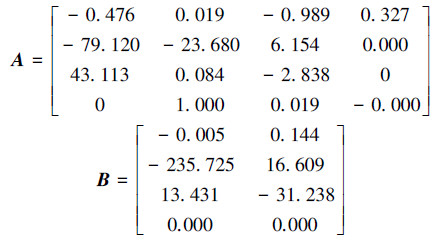
其中状态向量x中的元素按顺序分别代表侧滑角,滚转角速度,偏航角速度,滚转角,控制向量u中的元素按顺序分别代表副翼信号和方向舵信号[2]。
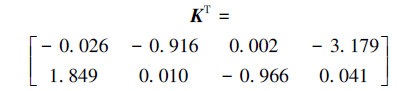
首先对系统进行检验发现系统可控但A矩阵不满足Hurwitz条件,则应当选择合适的K阵来使得Am=A-BKT为Hurwitz矩阵。
本文采用LQR方法,得
设定系统模型不确定参数:
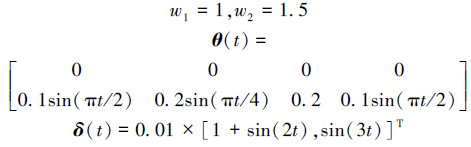
设定参数边界:
则可直接计算出L=2,这里需要计算k的取值情况,即做出λ-k图,如图 3所示。由图 3知:选定k=300,容易验证:对于wi∈[0.1,2],i=1,2,‖G(s)‖L1均满足L1增益上界条件。
 |
| 图 3 λ-k曲线图 |
取输入 ,即飞机滚转45°的情况,自适应增益Γ=10 000,结果如图 4至图 6所示。
,即飞机滚转45°的情况,自适应增益Γ=10 000,结果如图 4至图 6所示。
 |
| 图 4 滚转角跟踪效果与舵面响应 |
 |
| 图 5 估计参数 |
 |
| 图 6 飞机各个状态的响应 |
从图 4可以看出滚转角能够快速渐进稳定的跟踪上目标信号,且无超调,证明本文采用方法的可靠性,同时可以发现在存在δ(t)的情况下控制量没有出现高频振荡。
从图 5中可以看出各个估计参数能够保持在预先设定的范围内,保证了估计参数的有界性。而图 6表明在L1自适应控制器作用下飞机偏航角,侧滑角等响应满足要求。
4 结 论本文所探讨的L1自适应控制方法,充分考虑了可能存在的不确定因素和外部干扰,针对传统模型在实现自适应方面的不足,本文对飞机的侧向通道设计了滚转角控制。仿真结果表明,本文的方法能够很好跟踪输入信号,且保证了良好的瞬态性能与鲁棒性,解决了上述自适应方法一些不足问题,只是对硬件处理能力一些限制。所以该方法预期有较广阔的应用前景,可能成为下一步研究的重要方向。
| [1] | Cao C Y, Hovakimyan N.Design and Analysis of a Novel L1 Adaptive Controller, Part 1:Control Signal and Asymptotic Stability[C]//American Control Conference, Inst of Electrical and Electronics Engineers, Piscataway NJ, 2006:3397-3402 |
| Click to display the text | |
| [2] | 吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2005:218-239 Wu Sentang, Fei Yuhua. Flight Control System[M]. Beijing, Beihang University Press, 2005:218-239(in Chinese) |
| [3] | 王东来,吕强,刘峰,王珂珂.基于L1自适应方法的四旋翼飞行器纵向控制[J].弹箭与制导学报,2011,31(6):37-40 Wang Donglai, Lü Qiang, Liu Feng, Wang Keke. Quadrotor Longitudinal Controller Based on L1 Adaptive Control Method[J]. Journal of Projectiles Rockets Missiles and Guidance, 2011, 31(6):37-40(in Chinese) |
| Cited By in Cnki (9) | Click to display the text | |
| [4] | 鲁可,袁锁中. L1自适应方法在无人战斗机纵向控制中的应用[J].航空兵器,2013(5):36-39 Lu Ke, Yuan Suozhong. Longitudinal Controller for UCAV Based on L1 Adaptive Control Theory[J]. Aero Weaponry, 2013(5):36-39(in Chinese) |
| Cited By in Cnki (1) | Click to display the text | |
| [5] | Hovakimyan N, Cao C Y. L1 Adaptive Control Theory Guaranteed Robustness with Fast Adaptation[M]. Society for Industry and Applied Mathematics, 2010:34-118 |
| [6] | Cao C Y,Hovakimyan N.L1 Adaptive Controller for Multi-Input Multi-Output Systems in the Presence of Unmatched Disturbances[C]//American Control Conference, Inst of Electrical and Electronics Engineers, Seattle, Washington, 2008:4105-4110 |
| Click to display the text |