




Control Strategy of A Motor-type Active Anti-roll Stabilizer with Multiple Operating Modes
-
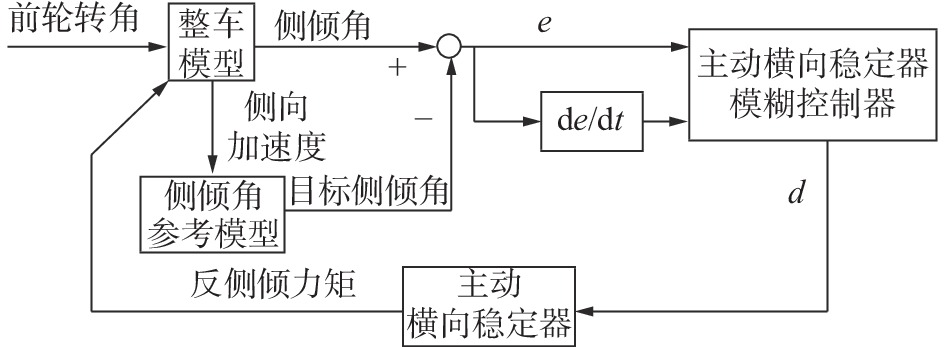
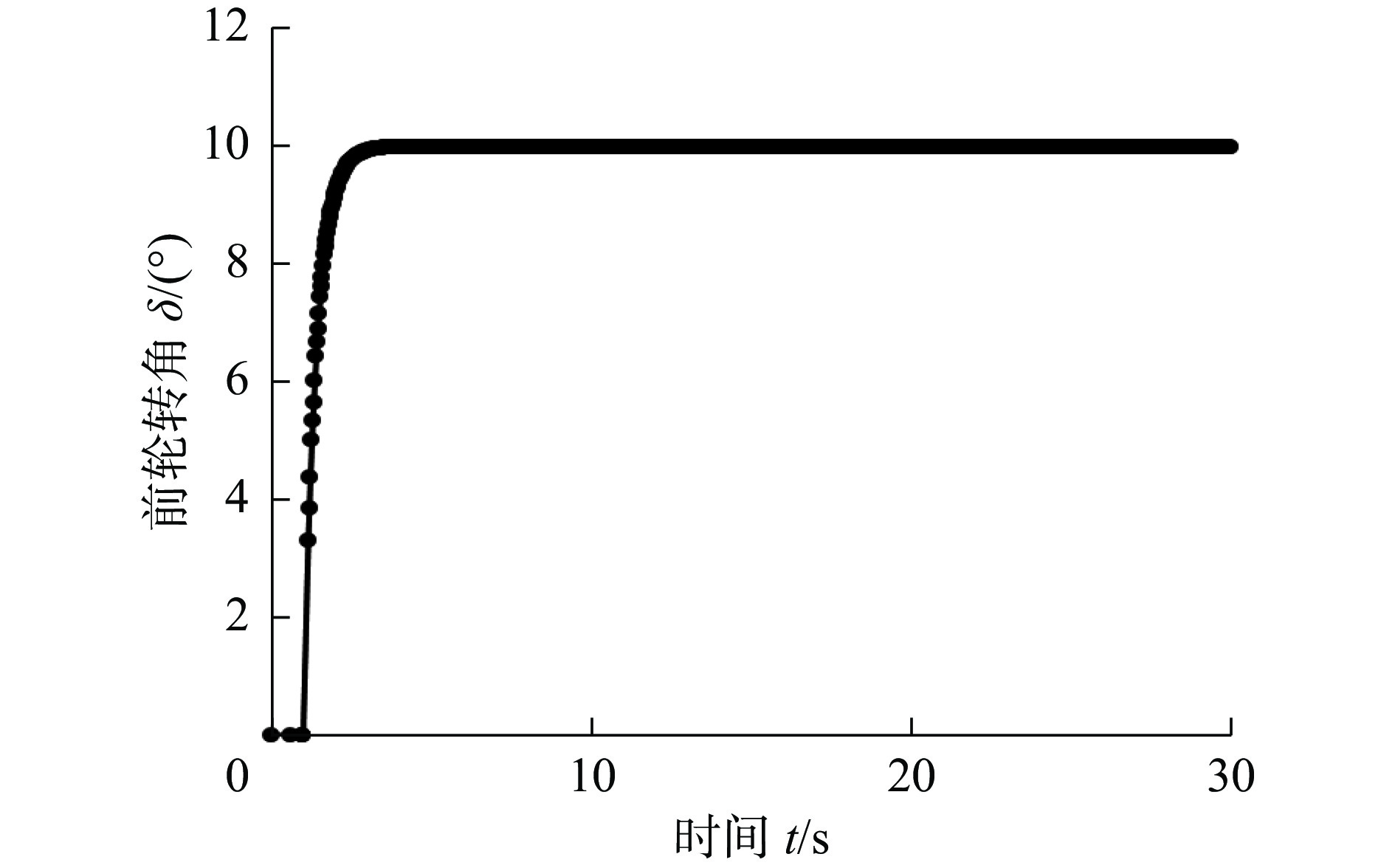
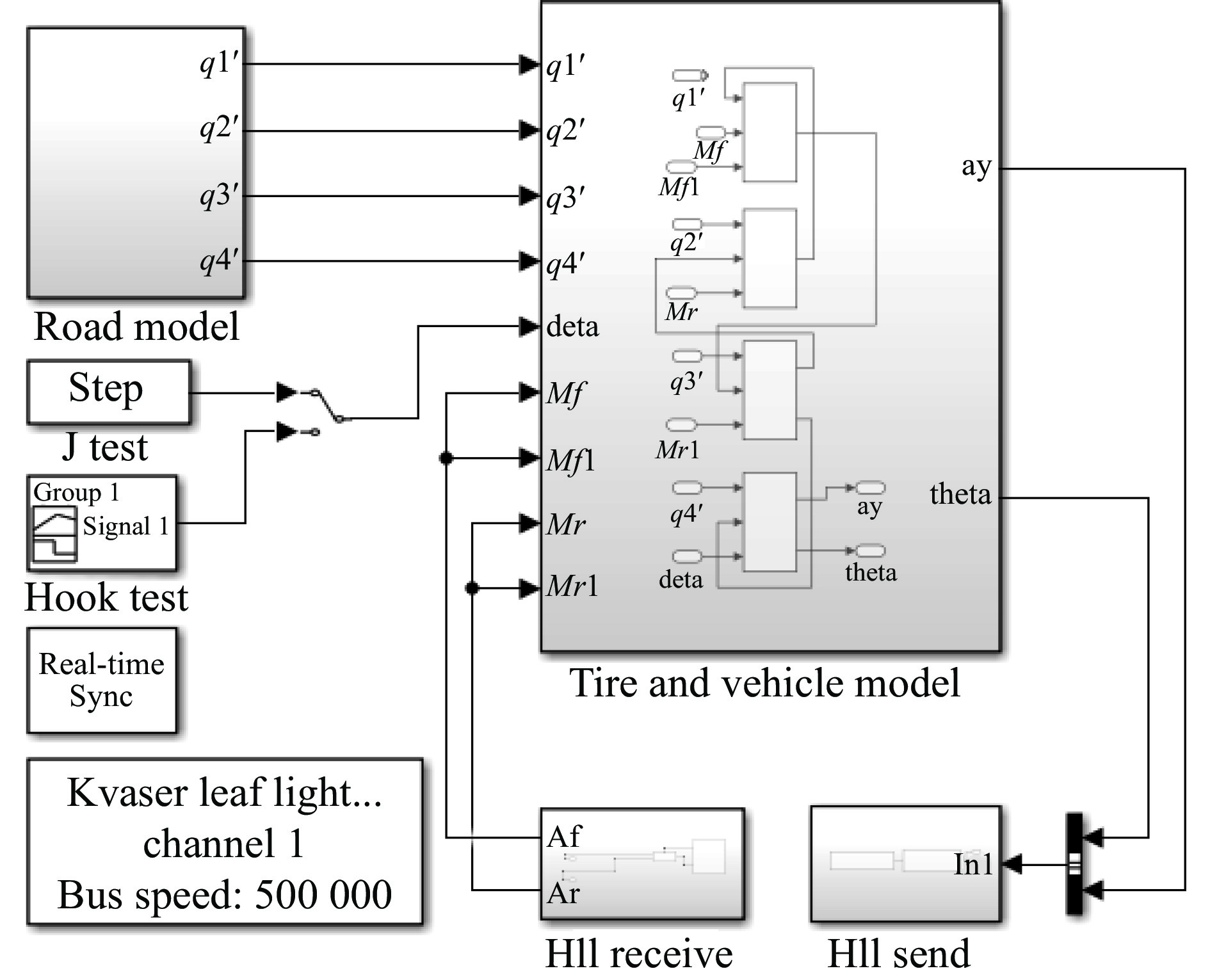
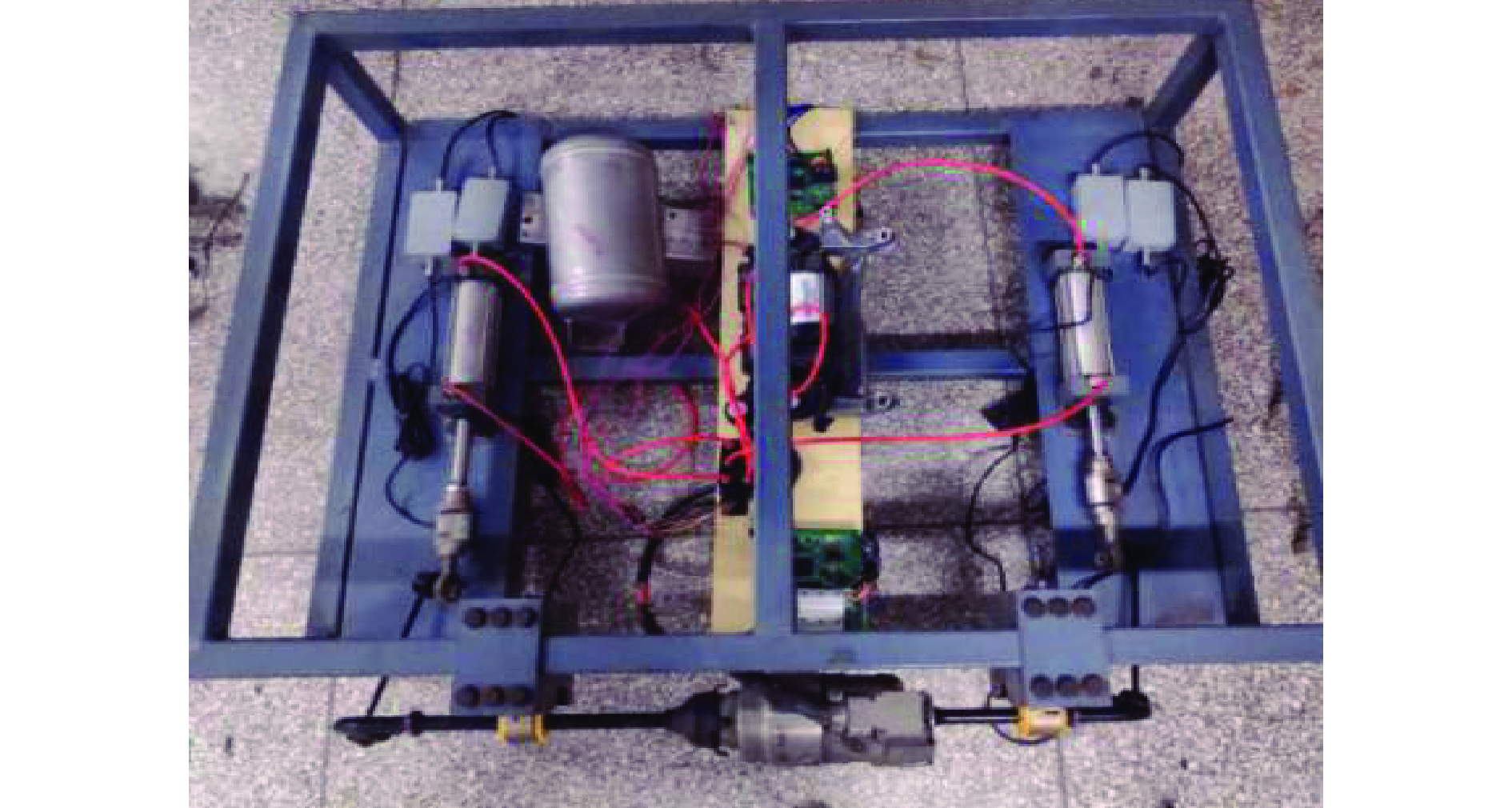
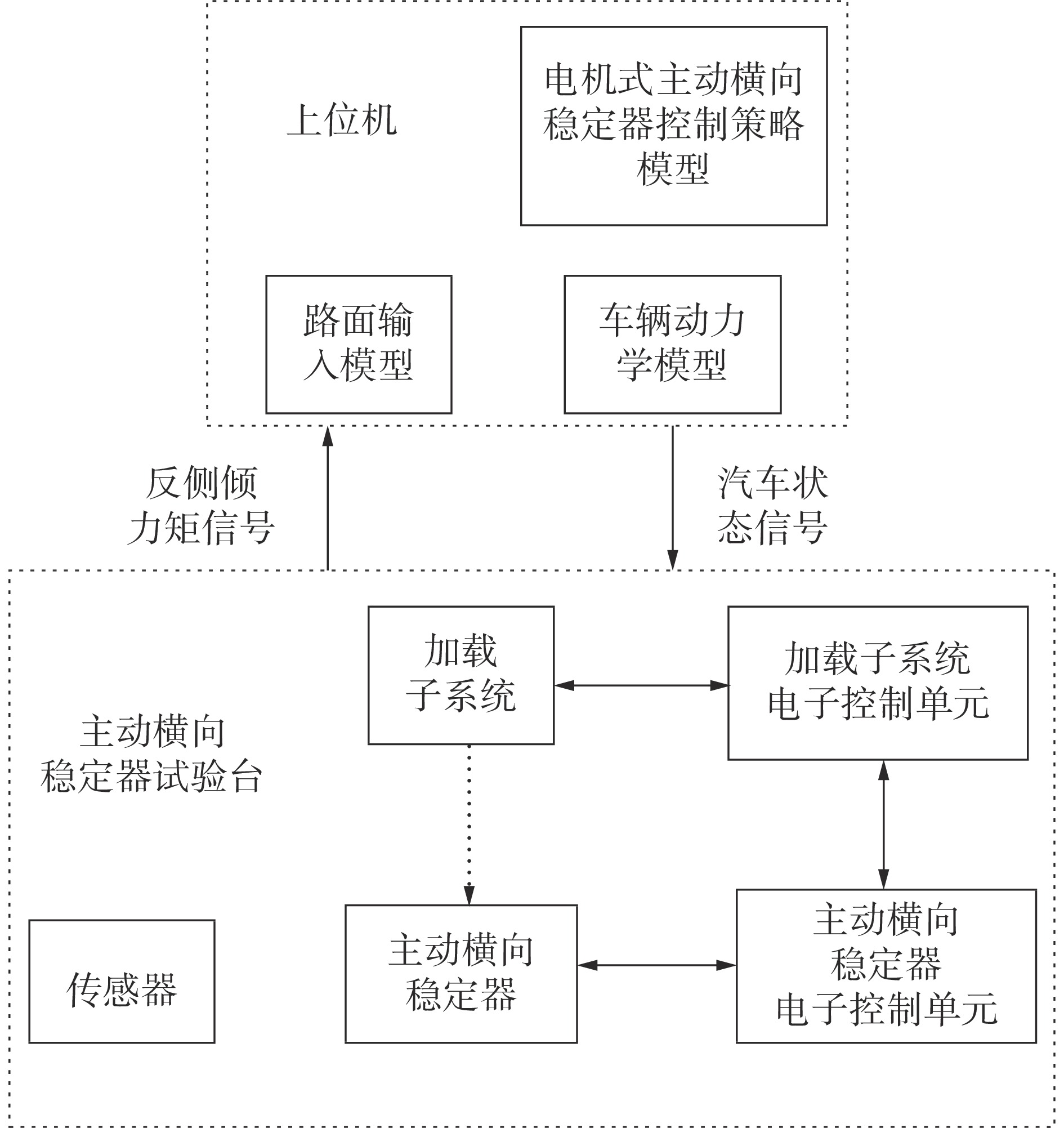
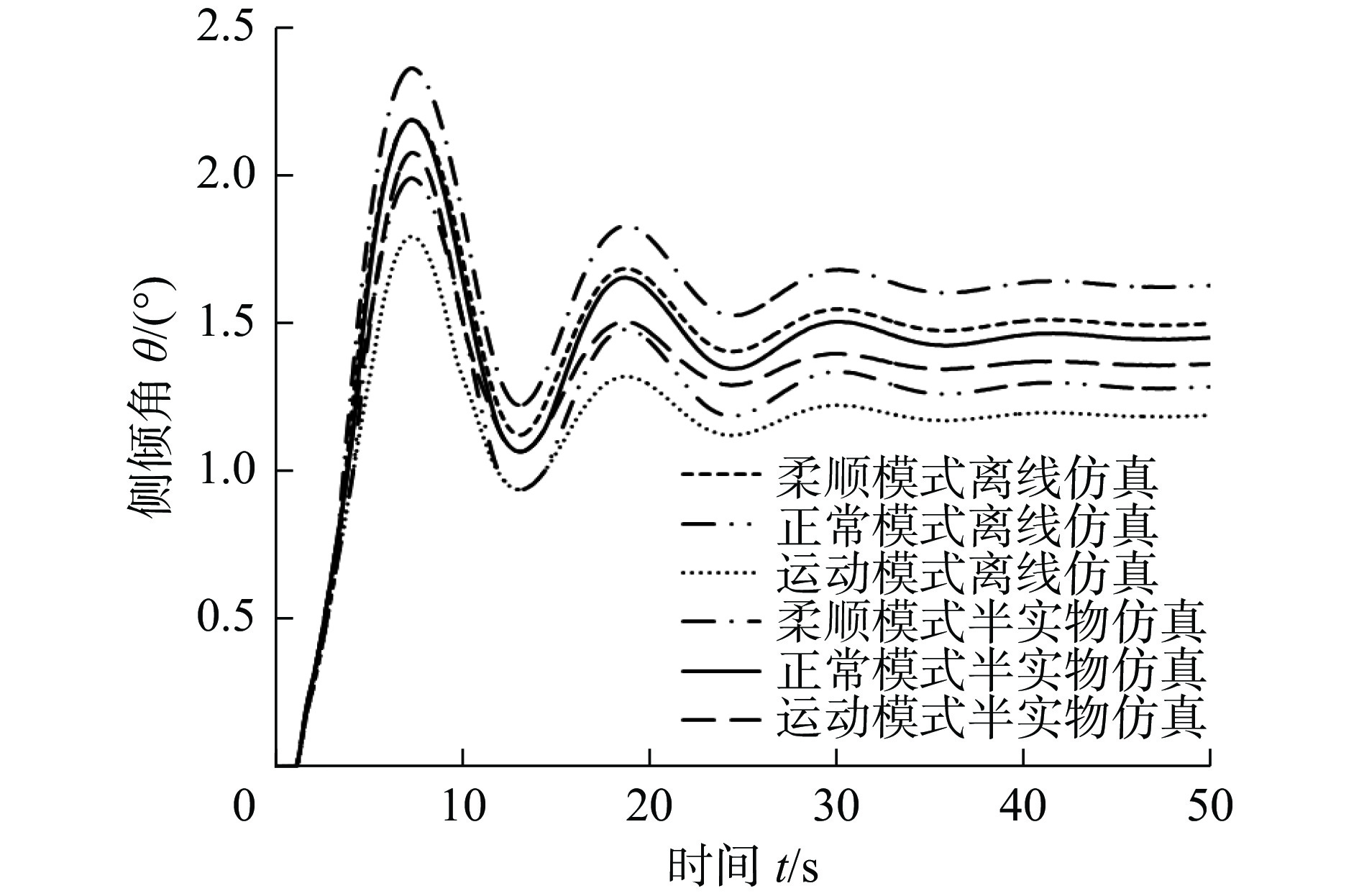
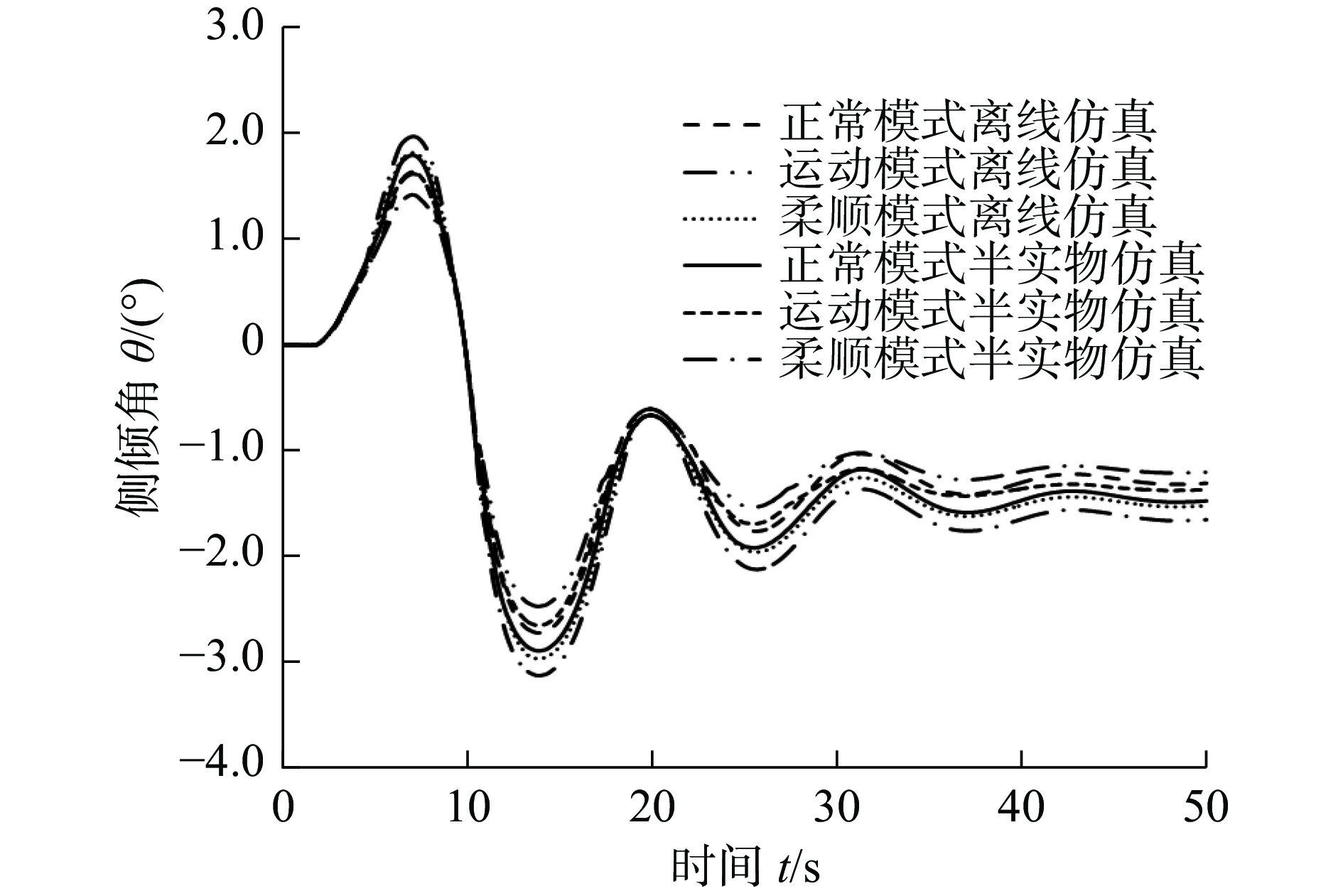
摘要: 为兼顾不同工况下侧倾稳定性及平顺性,并考虑驾驶员驾驶习惯的差异性,本文提出并研究具有多工作模式的电机式主动横向稳定器(Electric active anti-roll stabilizer,EAAS)模糊控制策略。首先利用MATLAB/Simulink和Vehicle Network Toolbox建立具有EAAS的九自由度整车动力学仿真模型,然后采用Mamdani模糊控制方法,构建具有多工作模式的EAAS模糊控制策略,并利用角阶跃工况和鱼钩工况分别开展离线仿真,最后设计出EAAS电子控制单元及其半实物仿真台架,并通过半实物仿真进一步验证了EAAS模糊控制策略的有效性,主要研究结果表明,基于多工作模式的EAAS模糊控制策略能够有效提高车辆侧倾稳定性。
-
关键词:
- 电机式主动横向稳定器 /
- 多工作模式 /
- 模糊控制策略 /
- 离线仿真 /
- 半实物仿真
Abstract: Taking into account the roll stability and ride comfort under different working conditions as well as differences of drivers' driving habits, this paper proposes the fuzzy control strategy of an electric active anti-roll stabilizer (EAAS) with multiple operating modes. Firstly, a nine-degree-of-freedom vehicle dynamic model of the EAAS is established by using the MATLAB/Simulink and Vehicle Network Toolbox. Then, the Mamdani fuzzy control method is used to construct the fuzzy control strategy of the EAAS with multiple operating modes. Its off-line simulation is carried out under the angle step condition and fishhook condition. Finally, the electronic control unit and HIL test-bed of the EAAS are designed respectively. The effectiveness of the fuzzy control strategy is further verified with the HIL simulation. The simulation results show that the fuzzy control strategy of the EAAS with multiple operating modes can effectively improve the vehicle's roll stability. -
表 1 EAAS内嵌电机部分参数
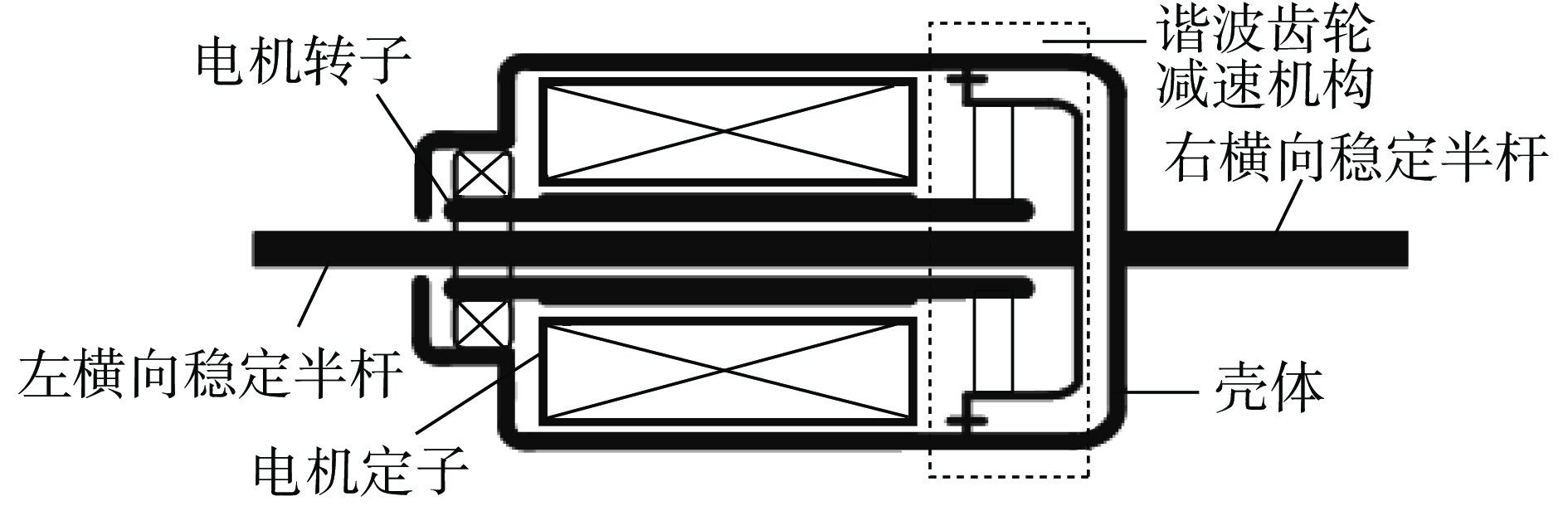
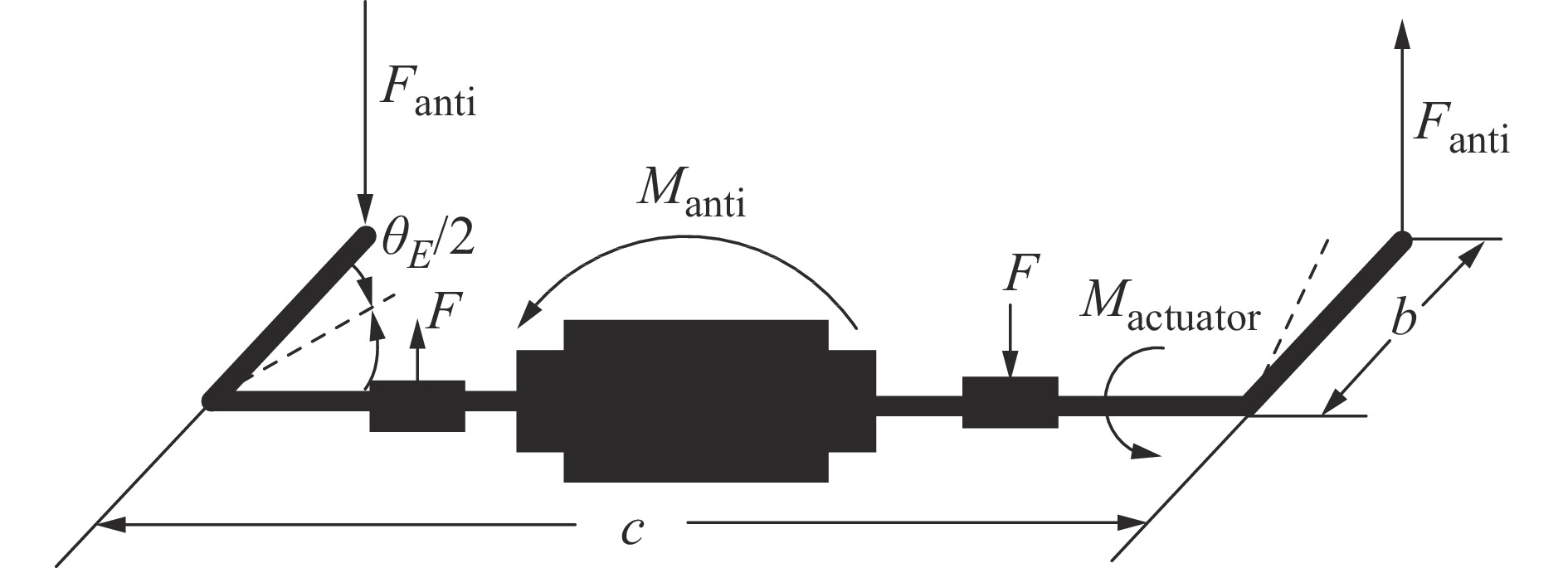
参数 数值 电机极对数P 4 电阻R/Ω 0.204 稳定器力臂长度b/m 0.13 转子转动惯量J/(kg·m2) 0.000196 电源电压V/V 12 稳定器长度c/m 0.85  下载: 导出CSV
下载: 导出CSV
表 2 模糊规则表
e ec NB NM NS ZO PS PM PB NB NB NB NB NB NM NM NS NM NB NB NM NM NM NM NS NS NM NM NS NS NS NS ZO ZO NM NS NS ZO PS PS PM PS ZO PS PS PS PS PM PM PM PS PM PM PM PM PB PB PB PS PM PM PB PB PB PB
下载: 导出CSV
表 3 整车动力学仿真模型部分参数
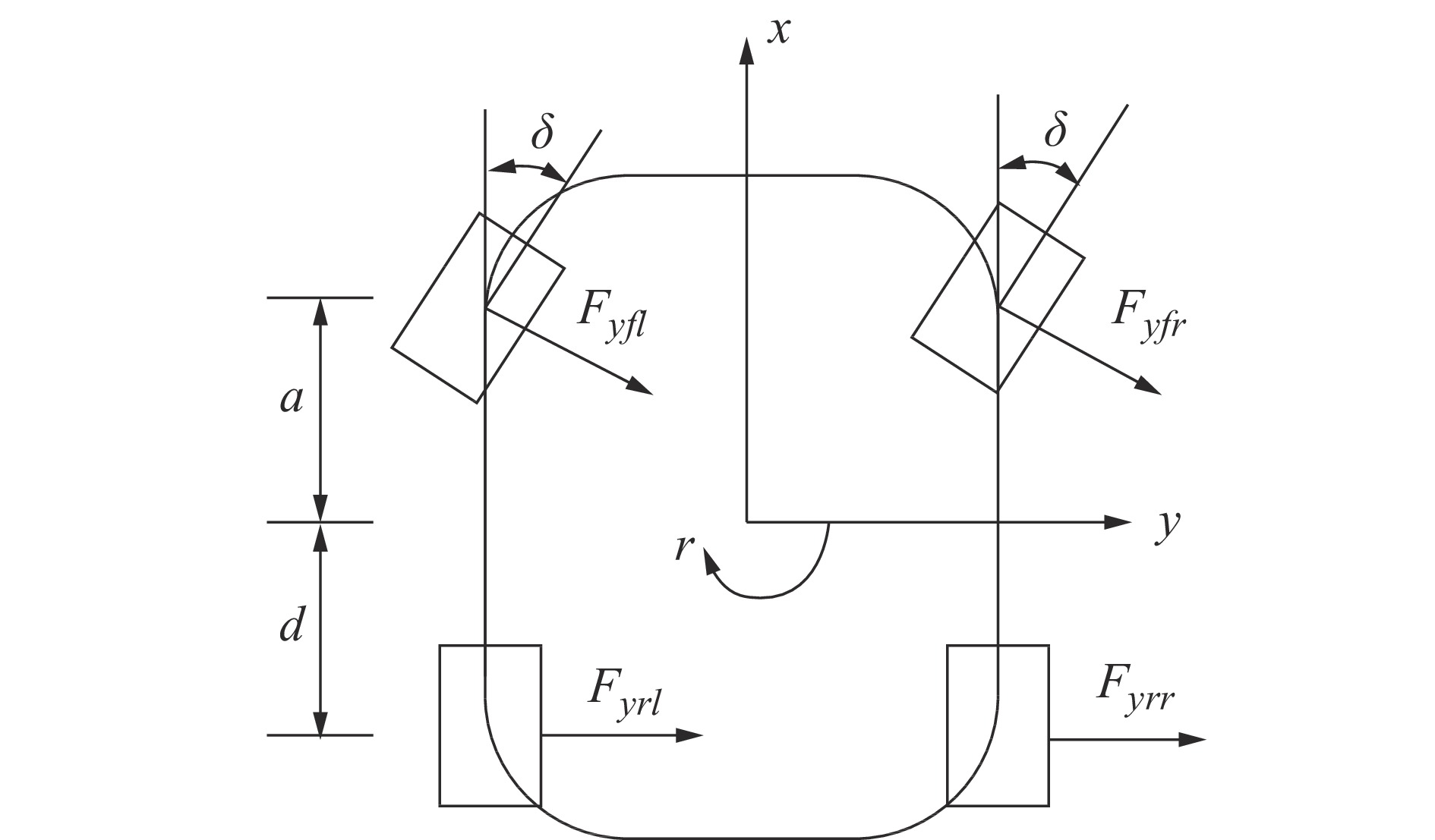
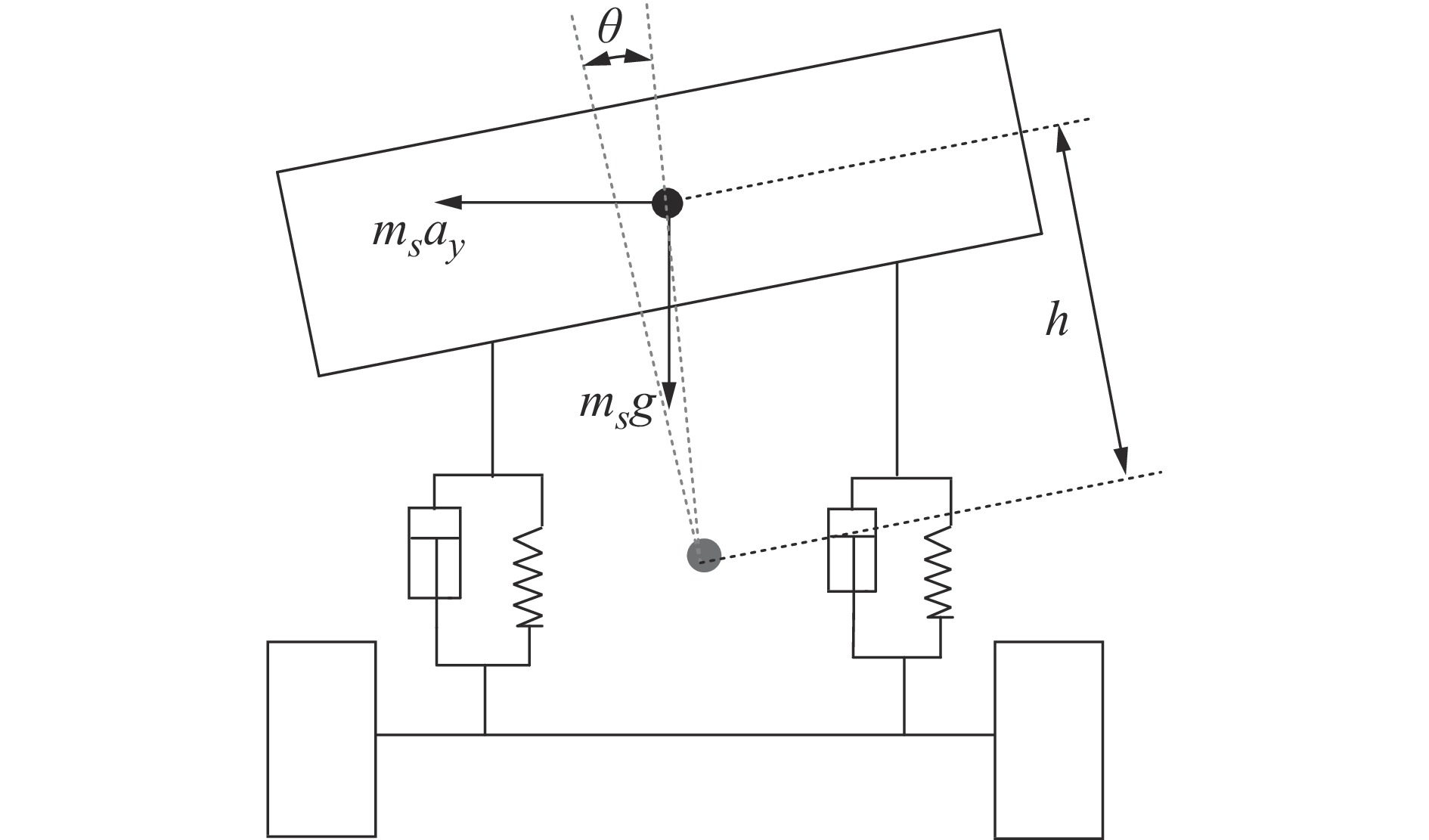
参数 数值 参数 数值 ms/kg 1210 Iφ/(kg·m2) 1920 mui/kg 45 Ir/(kg·m2) 2000 m/kg 1390 kti/(N·m−1) 200000 kf/(N·m−1) 25000 kr/(N·m−1) 22000 cf/(N·s·m−1) 1600 cr/(N·s·m−1) 1500 a/m 1.13 Iθ/(kg·m2) 390 d/m 1.47 h/m 0.445 bs/m 1.48 G0/m3 6.4 × 10−5
下载: 导出CSV
表 5 加载气缸主要参数
参数 数值 缸径/mm 50 活塞杆直径/mm 20 使用压力/MPa 0.1 ~ 1 活塞行程/mm 125 速度范围/(mm·s−1) 30 ~ 800 使用温度/℃ −5 ~ 70
下载: 导出CSV
-
[1] 刘世杰, 严天一, 贾兆功, 等. 电动式主动横向稳定器模型预测控制策略开发[J]. 机械科学与技术, 2021, 40(4): 548-555. doi: 10.13433/j.cnki.1003-8728.20200094LIU S J, YAN T Y, JIA Z G, et al. Development of model predictive control strategy of an active vehicle anti-roll stabilizer[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(4): 548-555. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20200094 [2] 陈山. 液压式主动横向稳定杆系统设计与研究[D]. 南京: 南京理工大学, 2017CHEN S. Design and research on hydraulic active stabilizer bar[D]. Nanjing: Nanjing University of Science and Technology, 2017. (in Chinese) [3] 赵福民. 液压马达式汽车主动稳定杆系统建模、控制与实验研究[D]. 合肥: 合肥工业大学, 2017ZHAO F M. On the modeling, control and experiment of the automobile active stabilizer bar system with hydraulic motor[D]. Hefei: Hefei University of Technology, 2017. (in Chinese) [4] 周兵, 吕绪宁, 范璐, 等. 主动悬架与主动横向稳定杆的集成控制[J]. 中国机械工程, 2014, 25(14): 1978-1983. doi: 10.3969/j.issn.1004-132X.2014.14.026ZHOU B, LYU X N, FAN L, et al. Integrated control of active suspension system and active roll stabilizer[J]. China Mechanical Engineering, 2014, 25(14): 1978-1983. (in Chinese) doi: 10.3969/j.issn.1004-132X.2014.14.026 [5] 陈祥林, 赵韩, 甄圣超. 基于模糊滑模控制的汽车主动横向稳定杆研究[J]. 农业装备与车辆工程, 2018, 56(6): 17-21. doi: 10.3969/j.issn.1673-3142.2018.06.005CHEN X L, ZHAO H, ZHEN S C. Research on active anti-roll bar of vehicle based on fuzzy Sliding mode control[J]. Agricultural Equipment & Vehicle Engineering, 2018, 56(6): 17-21. (in Chinese) doi: 10.3969/j.issn.1673-3142.2018.06.005 [6] ZULKARNAIN N, IMADUDDIN F, ZAMZURI H, et al. Application of an active anti-roll bar system for enhancing vehicle ride and handling[C]//2012 IEEE Colloquium on Humanities, Science and Engineering. Kota Kinabalu: IEEE, 2012: 260-265 [7] MUNIANDY V, SAMIN P M, JAMALUDDIN H. Application of a self-tuning fuzzy PI-PD controller in an active anti-roll bar system for a passenger car[J]. Vehicle System Dynamics, 2015, 53(11): 1641-1666. doi: 10.1080/00423114.2015.1073336 [8] 白先旭, 徐时旭, 沈升, 等. 磁流变半主动横向稳定杆对汽车侧倾的影响[J]. 机械工程学报, 2019, 55(24): 145-152. doi: 10.3901/JME.2019.24.145BAI X X, XU S X, SHEN S, et al. Influence of magnetorheological semi-active stabilizer bar on vehicle roll[J]. Journal of Mechanical Engineering, 2019, 55(24): 145-152. (in Chinese) doi: 10.3901/JME.2019.24.145 [9] 李姣, 皮大伟, 王洪亮, 等. 电动车用电机式主动稳定杆多模式控制策略研究[J]. 中国机械工程, 2018, 29(23): 2821-2828. doi: 10.3969/j.issn.1004-132X.2018.23.008LI J, PI D W, WANG H L, et al. Research on multi-mode control strategy of electric active stabilizer bars for electric vehicles[J]. China Mechanical Engineering, 2018, 29(23): 2821-2828. (in Chinese) doi: 10.3969/j.issn.1004-132X.2018.23.008 [10] SUZUKI S, BUMA S, URABABA S, et al. Development of electric active stabilizer suspension system[C]//SAE 2006 World Congress & Exhibition. Detroit: SAE, 2006 [11] SORNIOTTI A. Electro-mechanical active roll control: a new solution for active suspensions[C]//SAE 2006 Automotive Dynamics, Stability and Controls Conference and Exhibition. Novi: SAE, 2006 [12] 邱香. 基于主动横向稳定杆的车辆侧倾控制研究[J]. 计算机仿真, 2016, 33(9): 169-173 . doi: 10.3969/j.issn.1006-9348.2016.09.036QIU X. Control research for enhancing vehicle roll stability based on active anti-roll bar[J]. Computer Simulation, 2016, 33(9): 169-173 . (in Chinese) doi: 10.3969/j.issn.1006-9348.2016.09.036 [13] 杨凡, 周兵, 李栋升. 主动前轮转向系统仿真分析[C]//中国汽车工程学会年会论文集. 天津: 中国汽车工程学会, 2008: 692-695YANG F, ZHOU B, LI D S. Simulation and analysis of active front wheel steering system[C]//Proceedings of 2008 SAE-China Congress. Tianjin: SAE-China, 2008: 692-695. (in Chinese) [14] 张立军, 张天侠. 车辆四轮相关路面非平稳随机输入通用时频模型[J]. 振动与冲击, 2008, 27(7): 75-78. doi: 10.3969/j.issn.1000-3835.2008.07.017ZHANG L J, ZHANG T X. General nonstationary random input model of road surface with four wheels correlated[J]. Journal of Vibration and Shock, 2008, 27(7): 75-78. (in Chinese) doi: 10.3969/j.issn.1000-3835.2008.07.017 [15] 陈松, 张红党, 吴海东, 等. 基于主动横向稳定杆与差动制动联合控制的车辆防侧翻研究[J]. 汽车工程, 2019, 41(9): 1043-1049. doi: 10.19562/j.chinasae.qcgc.2019.09.009CHEN S, ZHANG H D, WU H D, et al. A research on vehicle rollover prevention based on combined control with active anti-roll bar and differential braking[J]. Automotive Engineering, 2019, 41(9): 1043-1049. (in Chinese) doi: 10.19562/j.chinasae.qcgc.2019.09.009 [16] 陈松, 张红党, 吴海东, 等. 一种新型主动横向稳定杆装置的设计与特性分析[J]. 汽车工程, 2019, 41(10): 1117-1123 . doi: 10.19562/j.chinasae.qcgc.2019.010.002CHEN S, ZHANG H D, WU H D, et al. Design and characteristic analysis of a new active anti-roll bar device[J]. Automotive Engineering, 2019, 41(10): 1117-1123 . (in Chinese) doi: 10.19562/j.chinasae.qcgc.2019.010.002 -







 点击查看大图
点击查看大图

图(18) / 表(5)
计量
- 文章访问数: 97
- HTML全文浏览量: 54
- PDF下载量: 19
- 被引次数: 0
