




Design and Workspace Optimization of 2UPS/RR Ankle Rehabilitation Mechanism
-
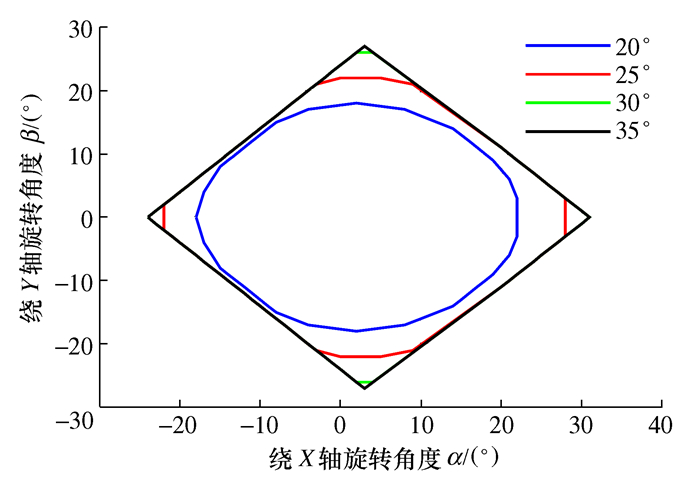
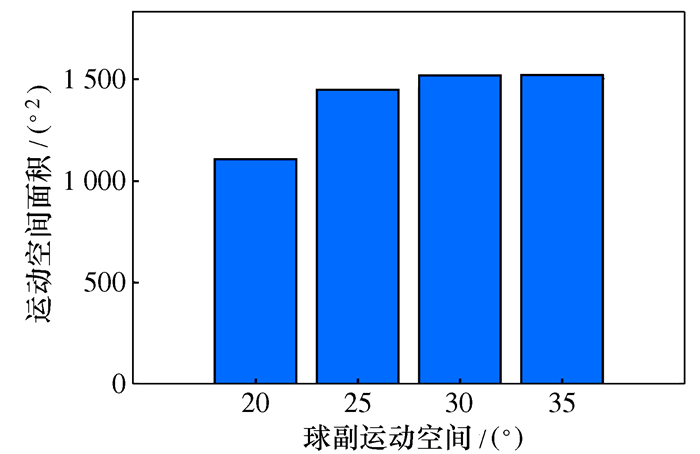
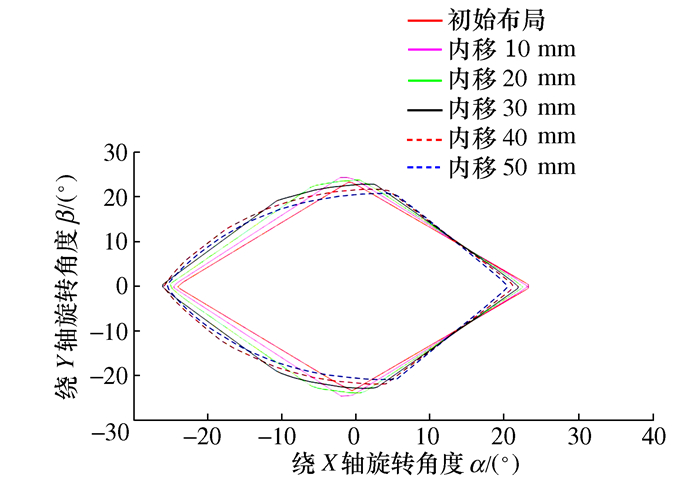
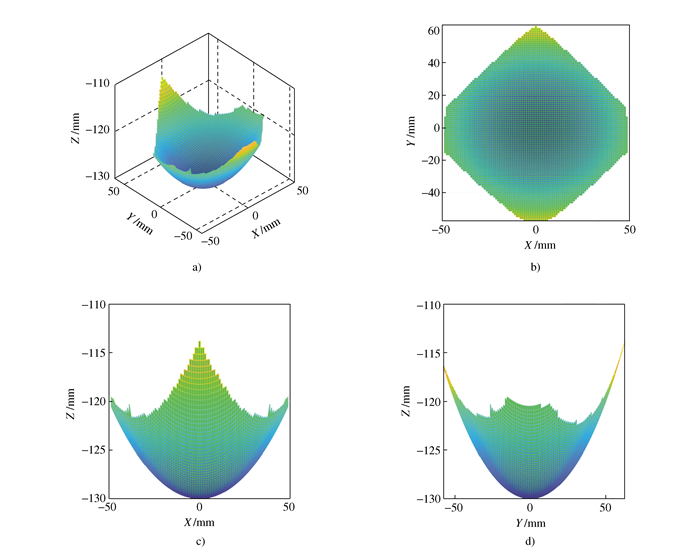
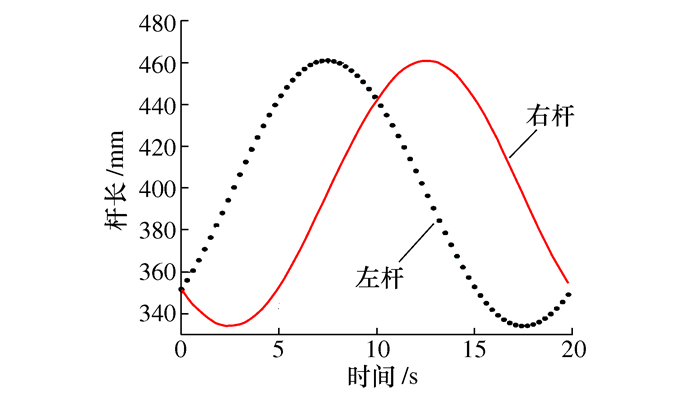
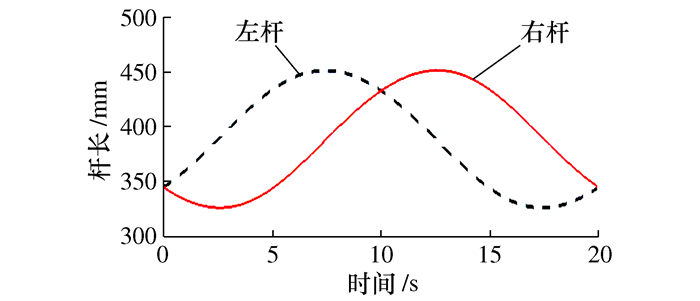
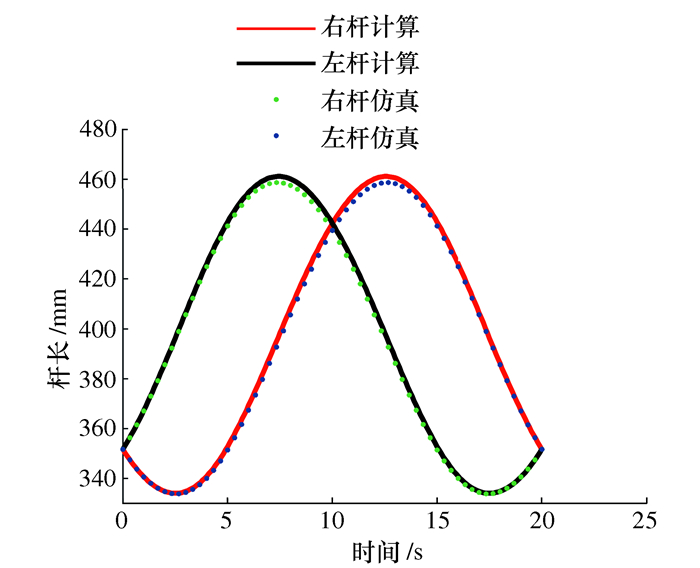
摘要: 为了实现脚踝康复运动,设计开发2UPS/RR脚踝康复机器人;通过螺旋理论对并联机构自由度进行计算,使用闭环矢量法求得机构的逆解方程,应用点集搜索法求得机构得工作空间;调整并研究机构杆件空间位置布局对工作空间及面积的影响, 结果表明,优化后的机构的工作空间能够满足脚踝康复所需的运动角度。最后以MATLAB及ADAMS软件通过实例验证逆解正确性, 并仿真得到机构确定点在空间中运动轨迹。Abstract: In order to achieve ankle rehabilitation exercise, a 2UPS/RR ankle rehabilitation robot was designed and developed. The degree of freedom of the parallel mechanism was calculated using the spiral theory, the inverse equation of the mechanism was obtained by closed vector method, and the point set search method was used to calculate its workspace. The spatial positions and layout of the mechanism rods were adjusted and their influence on the workspace and area was researched. The results show that the working space of the optimized mechanism can meet the motion range required for ankle rehabilitation. Finally, the MATLAB and ADAMS software were used to verify the correctness of the inverse solution through examples, and the trajectory of the mechanism to determine the point in the space was obtained by simulation.
-
Key words:
- ankle rehabilitation robot /
- parallel mechanism /
- closed vector method /
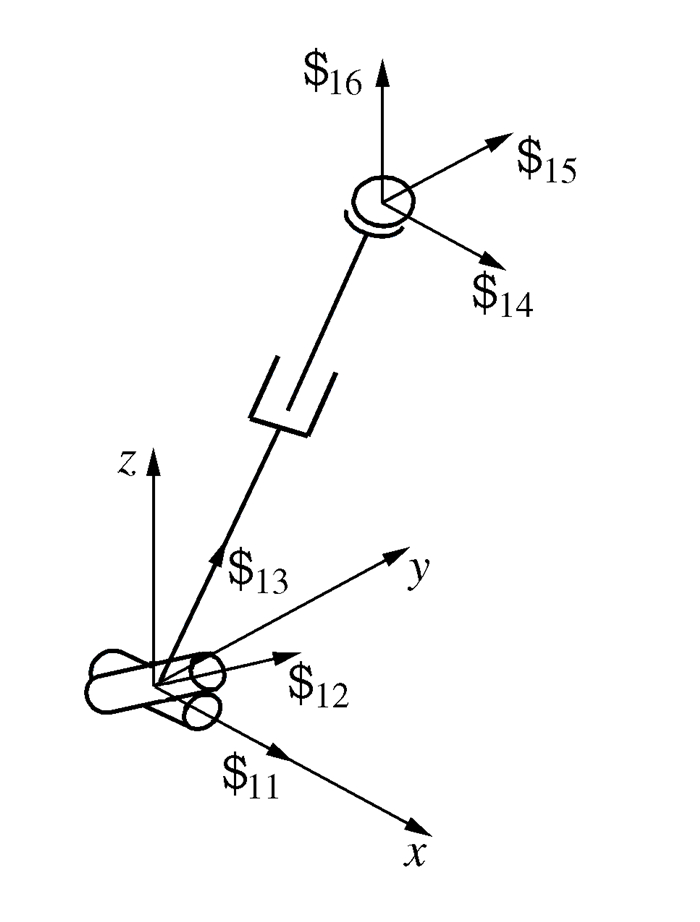
- spiral theory /
- workspace
-
表 1 机构参数
点位 位置 Oa1 (205, 165, -385) Oa2 (-205, 165, -385) Tb1 (161.35, 158.98, 9.05) Tb1 (-161.35, 158.98, 9.05)  下载: 导出CSV
下载: 导出CSV
-
[1] 彭忠琦. 并联机构的发展及应用[J]. 光机电信息, 2011, 28(12): 45-50 https://www.cnki.com.cn/Article/CJFDTOTAL-GJDX201112016.htmPENG Z Q. Development and application of parallel mechanism[J]. OME Information, 2011, 28(12): 45-50 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GJDX201112016.htm [2] 李剑锋, 徐成辉, 陶春静, 等. 基于3-UPS/RRR的并联踝关节康复机构及其性能分析[J]. 自动化学报, 2016, 42(12): 1794-1807 https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201612003.htmLI J F, XU C H, TAO C J. et al. A parallel ankle rehabilitation mechanism and its performance analysis based on 3-UPS/RRR[J]. Acta Automatica Sinica, 2016, 42(12): 1794-1807 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201612003.htm [3] 胡微微. 一种新型踝关节康复训练机器人机构的研究[D]. 太原: 中北大学, 2017HU W W. Study on a new type of ankle rehabilitation robot mechanism[D]. Taiyuan: North University of China, 2017 (in Chinese) [4] 姚太顺, 孟宪杰. 踝关节外科[M]. 北京: 中国中医药出版社, 1998YAO T S, MENG X J. Ankle surgery[M]. Beijing: China Traditional Chinese Medicine Press, 1998, (in Chinese) [5] 李剑锋, 李世才, 陶春静, 等. 并联2-U-PS/-RRR踝关节康复机构及运动性能分析[J]. 机器人, 2016, 38(2): 144-153 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201602003.htmLI J F, LI S C, TAO C J, et al. Parallel 2-U-PS/-RRR ankle rehabilitation mechanism and kinematic performance analysis[J]. Robot, 2016, 38(2): 144-153 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201602003.htm [6] 刘芳芳, 周春国, 黄阳, 等. 一种并联脚踝康复机构的运动学与工作空间分析[J]. 机械设计, 2019, 36(1): 44-50 https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ201901009.htmLIU F F, ZHOU C G, HUANG Y, et al. Kinematics and workspace analysis of a parallel mechanism for ankle rehabilitation[J]. Journal of Machine Design, 2019, 36(1): 44-50 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ201901009.htm [7] 樊晓琴, 李瑞琴, 李庠, 等. (2-SPS+PU) & R混联式踝关节康复机器人及运动学性能分析[J]. 机械科学与技术, 2019, 38(7): 1035-1040 doi: 10.13433/j.cnki.1003-8728.2019.20180277FAN X Q, LI R Q, LI X, et al. (2-SPS+PU) & R hybrid ankle joint rehabilitation robot and kinematic performance analysis[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(7): 1035-1040 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2019.20180277 [8] 崔马茹, 武建德, 李瑞琴, 等. 3-URPR并联机构的逆运动学与可达工作空间分析[J]. 包装工程, 2020, 41(21): 196-201 https://www.cnki.com.cn/Article/CJFDTOTAL-BZGC202021029.htmCUI M R, WU J D, LI R Q, et al. Inverse kinematics and reachable workspace of 3-URPR parallel mechanism[J]. Packaging Engineering, 2020, 41(21): 196-201 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BZGC202021029.htm [9] 严骋, 杜忠华, 沈磊, 等. 三自由度纯转动并联机构的工作空间分析[J]. 机床与液压, 2014, 42(23): 87-89, 92 https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201423024.htmYAN C, DU Z H, SHEN L, et al. Workspace analysis of 3-DOF parallel manipulator of pure rotation[J] Machine Tool & Hydraulics, 2014, 42(23): 87-89, 92 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201423024.htm [10] 杨珍. 功能锻炼对慢性踝关节不稳的临床疗效研究[D]. 武汉: 华中师范大学, 2014YANG Z. Clinical efficacy of functional exercise on chronic ankle instability[D]. Wuhan: Central China Normal University, 2014 (in Chinese) [11] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]]2版. 北京: 高等教育出版社, 2014: 111-136HUANG Z, ZHAO Y S, ZHAO T S. Advanced spatial mechanism[M]. 2nd ed. Beijing: Higher Education Press, 2014: 111-136 (in Chinese) [12] 李俊帅, 马春生, 李瑞琴, 等. 新型混联机床主体-3UPS+1RPU并联机构的自由度分析与仿真[J]. 科学技术与工程, 2017, 17(8): 160-164 https://www.cnki.com.cn/Article/CJFDTOTAL-KXJS201708026.htmLI J S, MA J S, LI R Q, et al. Analysis and simulation on the degree of freedom of 3UPS+1RPU parallel mechanism of the main body of the new parallel machine tool[J]. Science Technology and Engineering, 2017, 17(8): 160-164 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KXJS201708026.htm [13] 黄真, 刘婧芳, 曾达幸. 基于约束螺旋理论的机构自由度分析的普遍方法[J]. 中国科学E辑: 技术科学, 2009, 39(1): 84-93 https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK200901012.htmHUANG Z, LIU J F, ZENG D X. A general methodology for mobility analysis of mechanisms based on constraint screw theory[J]. Science in China Series E: Technological Sciences, 2009, 52(5): 1337-1347 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK200901012.htm [14] YANG T L, LIU A X, SHEN H P, et al. General formula of degrees of freedom for spatial mechanisms[M]//YANG T L, LIU A X, SHEN H P, et al Topology Design of Robot Mechanisms. Singapore: Springer, 2018 [15] 黄真, 李艳文, 高峰. 空间运动构件姿态的欧拉角表示[J]. 燕山大学学报, 2002, 26(3): 189-192 https://www.cnki.com.cn/Article/CJFDTOTAL-DBZX200203000.htmHUANG Z, LI Y W, GAO F. The expression of the orientation of a spatial moving unit by euler angle[J]. Journal of Yanshan University, 2002, 26(3): 189-192 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DBZX200203000.htm [16] 郭晓宁, 汤桂泉, 高林芳, 等. 并联3-RRRPP踝关节康复机构的设计与分析[J]. 机械制造与自动化, 2017, 46(5): 181-184, 197 https://www.cnki.com.cn/Article/CJFDTOTAL-ZZHD201705047.htmGUO X N, TANG G Q, GAO L F, et al. Design and analysis of 3-RRRPP parallel mechanism for ankle rehabilitation[J]. Machine Building & Automation, 2017, 46(5): 181-184, 197 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZZHD201705047.htm [17] 马致远, 朱伟, 李寒冰, 等. 一种三平移并联机器人机构的多目标优化设计[J]. 机械传动, 2019, 43(2): 50-54 https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201902009.htmMA Z Y, ZHU W, LI H B, et al. Multi-objective optimization design for a kind of three-translation parallel robot mechanism[J]. Journal of Mechanical Transmission, 2019, 43(2): 50-54 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201902009.htm [18] 季晔, 刘宏昭, 原大宁. 4-SPS/PPU型并联机构工作空间与尺度分析[J]. 农业机械学报, 2013, 44(11): 322-328 https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201311054.htmJI Y, Liu H Z, Yuan D N. Workspace and scale analysis of 4-SPS/PPU parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(11): 322-328 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201311054.htm [19] 史素敏, 杨春长. 基于灵巧性的3-UPRR并联机构尺度综合研究[J]. 机械设计与制造, 2020(12): 128-133 https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202012029.htmSHI S M, YANG C C. Optimum design and research of 3-UPRR parallel mechanism based on dexterity[J]. Machinery Design & Manufacture, 2020(12): 128-133 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202012029.htm [20] 姚立纲, 廖志炜, 卢宗兴, 等. 踝关节章动式康复运动轨迹规划[J]. 机械工程学报, 2018, 54(21): 33-40 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201821005.htmYAO L G, LIAO Z W, LU Z X, et al. Nutation motion based trajectory planning for a novel hybrid ankle rehabilitation device[J]. Journal of Mechanical Engineering, 2018, 54(21): 33-40 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201821005.htm -








 点击查看大图
点击查看大图
图(21) / 表(2)
计量
- 文章访问数: 216
- HTML全文浏览量: 144
- PDF下载量: 27
- 被引次数: 0
