




Dynamic Modeling and Analysis of Climbing Robot
-
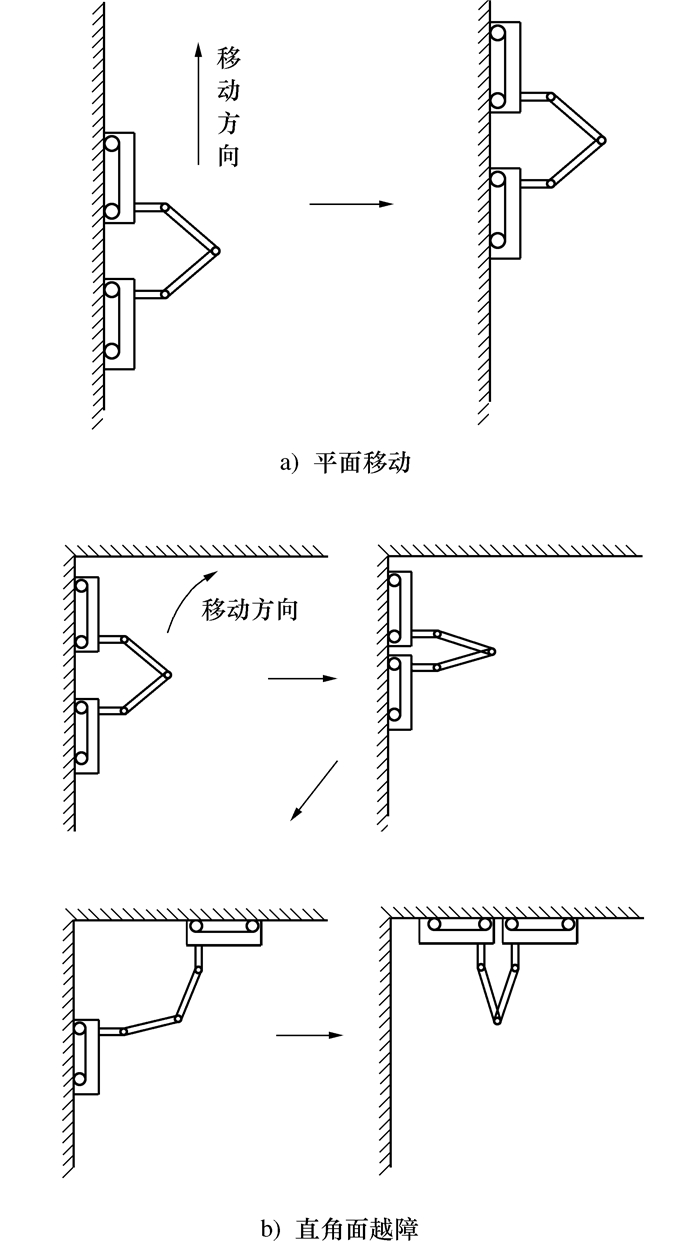
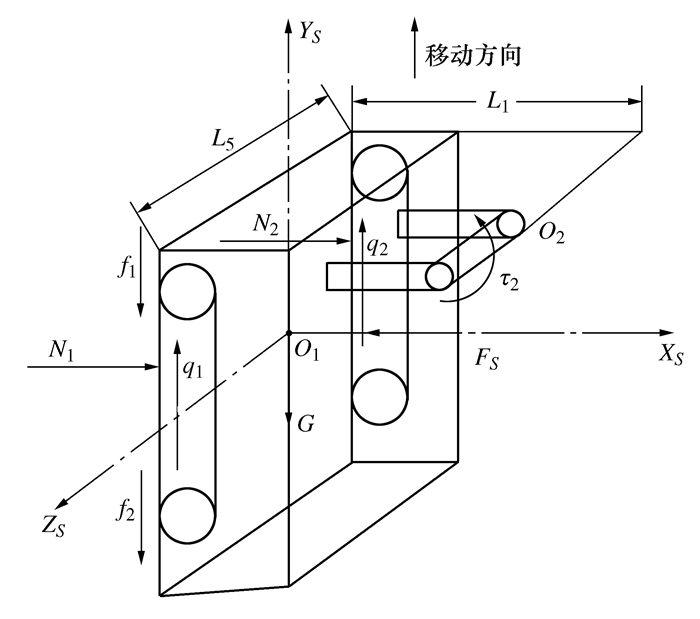
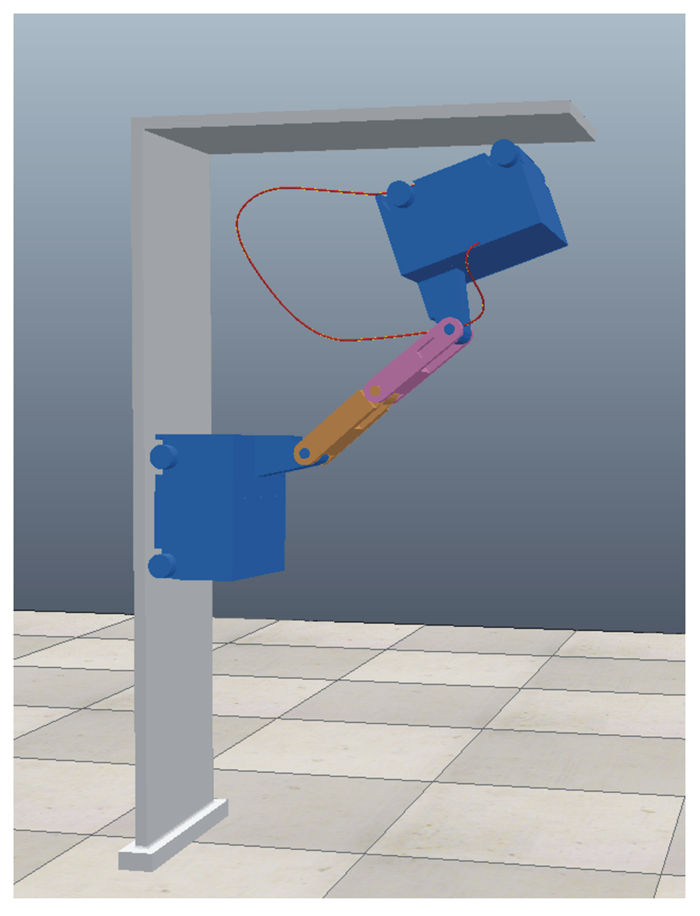
摘要: 在越障运动过程中攀爬机器人动力学特性分析方法。通过指数积空间的形式推导得到了空间速度雅可比矩阵进而减少因微分求导而产生的奇点,基于李群李代数与旋量理论通过拉格朗日方程建立了物理意义明确、计算复杂度低的动力学方程,建立了真空模块的力学模型,求解得到直角面越障过程中真空模块的最佳吸附力,并应用coppeliasim仿真求解出机器人关节驱动力矩,验证了李群李代数与旋量理论建模的正确性及动力学模型的有效性,通过吸附实验验证了真空模块吸附能力。Abstract: Aiming at the problems of dynamic characteristics and vacuum module force balance in the process of climbing robot crossing obstacles, a climbing robot dynamics characteristic analysis method in the process of obstacle crossing motion is established based on the Lie group, Lie algebra and screw theory. The space velocity Jacobian matrix is deduced in the form of index product space thereby reducing the singularity generated due to the differential derivation, a clear physical meaning low computational complexity dynamic equation is established based on Lagrange equation, Lie group Lie algebra and screw theory. The mechanical model of the vacuum module is established, and the optimal adsorption force of the vacuum module is obtained during the obstacle crossing process. The driving torque of the robot joint is solved by coppeliasim simulation, which verified the correctness and dynamics of Lie group Lie algebra and screw theory modeling. The effectiveness of the scientific model is verified by the adsorption experiment to verify the optimal solution of the adsorption force.
-
Key words:
- climbing robot /
- Lie group and Lie algebra /
- screw theory /
- dynamic modeling
-
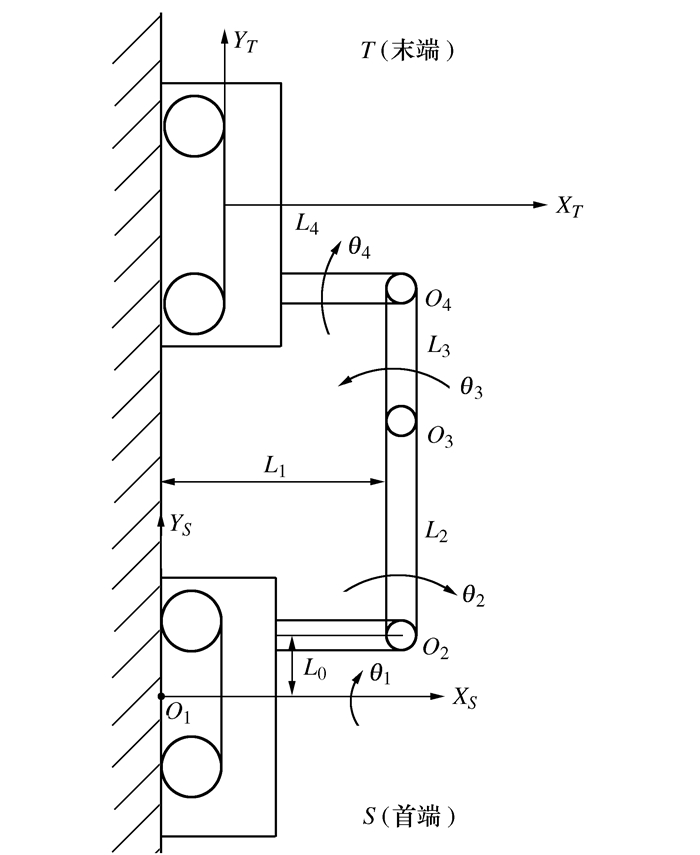
表 1 攀爬机器人结构参数
结构参数 数值 真空模块质量m1/kg 5.01 转臂1质量m2/kg 0.34 转臂2质量m3/kg 1.98 关节O2至腔底距离L1/mm 230.24 转臂1长度L0/mm 90 转臂2长度L2/mm 180 关节O4至腔底距离L4/mm 230.24 真空腔惯性矩阵I1/(kg·cm-2) 
转臂2惯性矩阵I2/(kg·cm-2) 
 下载: 导出CSV
下载: 导出CSV
表 2 吸附实验数据
材料 摩擦因数μ 关节O2力矩τ2/Nm 吸附力Fk/N 聚四氟乙烯 0.71 20.8, 19.7 141.5, 152.5 发泡硅胶 1.11 19.3, 21.1 149.9, 164.3 人造皮革 1.30 19.9, 21.6 152.8, 168.3
下载: 导出CSV
-
[1] LI B, JIN J F, GU S Q, et al. The preliminary study of wall climbing firefighting rescue robot for high-rise and super high-rise building[J]. Applied Mechanics and Materials, 2013, 404: 569-574 doi: 10.4028/www.scientific.net/AMM.404.569 [2] DANIEL G S. Autonomous staircase climbing robot for rescue application[J]. IOP Conference Series: Materials Science and Engineering, 2020, 912: 032085 doi: 10.1088/1757-899X/912/3/032085 [3] CHU B, JUNG K, HAN C S, et al. A survey of climbing robots: Locomotion and adhesion[J]. International Journal of Precision Engineering and Manufacturing, 2010, 11(4): 633-647 doi: 10.1007/s12541-010-0075-3 [4] TUMMALA R L, MUKHERJEE R, XI N, et al. Climbing the walls[robots][J]. IEEE Robotics and Automation Magazine, 2002, 9(4): 10-19 doi: 10.1109/MRA.2002.1160067 [5] XIE D S, LIU J B, KANG R J, et al. Fully 3D-printed modular pipe-climbing robot[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 462-469 doi: 10.1109/LRA.2020.3047795 [6] GAO F M, FAN J C, ZHANG L B, et al. Magnetic crawler climbing detection robot basing on metal magnetic memory testing technology[J]. Robotics and Autonomous Systems, 2020, 125: 103439 doi: 10.1016/j.robot.2020.103439 [7] JI A H, ZHAO Z H, MANOONPONG P, et al. A bio-inspired climbing robot with flexible pads and claws[J]. Journal of Bionic Engineering, 2018, 15(2): 368-378 doi: 10.1007/s42235-018-0028-6 [8] DEGANI A. Dynamic single actuator robot climbing a chute[J]. Meccanica, 2016, 51(5): 1227-1243 doi: 10.1007/s11012-015-0286-x [9] 王云倩, 牟玉壮, 张剑. 基于CPG控制的六足爬壁机器人自主越障研究[J]. 哈尔滨工程大学学报, 2018, 39(3): 584-593 https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201803027.htmWANG Y Q, MOU Y Z, ZHANG J. Autonomous obstacle crossing of a wall-climbing hexapod robot based on CPG control[J]. Journal of Harbin Engineering University, 2018, 39(3): 584-593 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201803027.htm [10] AUSTIN M P, HARPER M Y, BROWN J M, et al. Navigation for legged mobility: dynamic climbing[J]. IEEE Transactions on Robotics, 2020, 36(2): 537-544 doi: 10.1109/TRO.2019.2958207 [11] XU F Y, SHEN J J, JIANG G P, et al. Kinematic and dynamic analysis of a cable-climbing robot[J]. International Journal of Advanced Robotic Systems, 2015, 12(7): 1-17 [12] DU Q L, LU X P, WANG Y K, et al. The obstacle-surmounting analysis of a pole-climbing robot[J]. International Journal of Advanced Robotic Systems, 2020, 17(6): 1-20 [13] 秦基伟, 常勇, 袁兵兵, 等. 一种滚动密封式爬壁机器人动力学建模与分析[J]. 中国机械工程, 2019, 30(24): 2978-2985 https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201924014.htmQIN J W, CHANG Y, YUAN B B, et al. Dynamics modeling and analysis of a rolling sealed wall-climbing robot[J]. China Mechanical Engineering, 2019, 30(24): 2978-2985 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201924014.htm [14] 徐亚茹, 刘荣. 一种爬壁机器人动力学建模方法[J]. 北京航空航天大学学报, 2018, 44(2): 280-285 doi: 10.13700/j.bh.1001-5965.2017.0097XU Y R, LIU R. An approach for dynamic modeling of climbing robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(2): 280-285 (in Chinese) doi: 10.13700/j.bh.1001-5965.2017.0097 [15] NAM S M, OH J, LEE G, et al. Dynamic analysis during internal transition of a compliant multi-body climbing robot with magnetic adhesion[J]. Journal of Mechanical Science and Technology, 2014, 28(12): 5175-5187 [16] 董伟光, 王洪光, 姜勇. 一种轮足复合式爬壁机器人动力学建模与分析[J]. 机器人, 2015, 37(3): 264-270 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201503002.htmDONG W G, WANG H G, JIANG Y. Dynamics modeling and analysis of a wall-climbing robot with biped-wheel hybrid locomotion mechanism[J]. Robot, 2015, 37(3): 264-270 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201503002.htm [17] LU Y, ZHOU K K, YE N J. Design and kinemics/ dynamics analysis of a novel climbing robot with tri-planar limbs for remanufacturing[J]. Journal of Mechanical Science and Technology, 2017, 31(3): 1427-1436 [18] LEE K, WANG Y F, CHIRIKJIAN G S. O(n) mass matrix inversion for serial manipulators and polypeptide chains using Lie derivatives[J]. Robotica, 2007, 25(6): 739-750 [19] CHEN G L, WANG H, LIN Z Q. Determination of the identifiable parameters in robot calibration based on the POE formula[J]. IEEE Transactions on Robotics, 2014, 30(5): 1066-1077 [20] YANG K, YANG W Y, WANG C M. Inverse dynamic analysis and position error evaluation of the heavy-duty industrial robot with elastic joints: an efficient approach based on Lie group[J]. Nonlinear Dynamics, 2018, 93(2): 487-504 [21] 吕志忠, 张成维, 钟功祥, 等. 一种四足磁吸附爬壁机器人运动学分析及仿真[J]. 工程科学与技术, 2020, 52(2): 121-129 https://www.cnki.com.cn/Article/CJFDTOTAL-SCLH202002015.htmLYU Z Z, ZHANG C W, ZHONG G X, et al. Kinematics analysis and simulation of a quadruped magnetic adsorption wall-climbing robot[J]. Advanced Engineering Sciences, 2020, 52(2): 121-129 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SCLH202002015.htm [22] 张高巍, 杨鹏, 王婕, 等. 可穿戴五自由度上肢外骨骼机器人固定时间控制[J]. 控制理论与应用, 2020, 37(1): 205-214 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY202001023.htmZHANG G W, YANG P, WANG J, et al. Fixed-time control for wearable 5 degrees of freedom upper-limb exoskeleton[J]. Control Theory and Applications, 2020, 37(1): 205-214 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY202001023.htm [23] 郭冰菁, 韩建海, 李向攀, 等. 步态康复机器人动力学李群李代数建模及仿真[J]. 系统仿真学报, 2020, 32(6): 1126-1135 https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ202006016.htmGUO B J, HAN J H, LI X P, et al. Dynamics modeling and simulation of gait rehabilitation robot based on lie groups and lie algebras theory[J]. Journal of System Simulation, 2020, 32(6): 1126-1135 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ202006016.htm [24] 韩博, 韩媛媛, 许允斗, 等. 基于螺旋理论的四面体可展机构运动特性与动力学分析[J]. 机器人, 2020, 42(1): 21-28 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202001003.htmHAN B, HAN Y Y, XU Y D, et al. Kinematic characteristics and dynamics analysis of the tetrahedral deployable mechanism based on the screw theory[J]. Robot, 2020, 42(1): 21-28 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202001003.htm [25] 马广英, 刘润晨, 陈原, 等. 4足机器人腿部机构运动学分析及步态规划[J]. 北京理工大学学报, 2020, 40(4): 401-408 https://www.cnki.com.cn/Article/CJFDTOTAL-BJLG202004008.htmMA G Y, LIU R C, CHEN Y, et al. Kinematics analysis and gait planning of the quadruped robot leg mechanism[J]. Transactions of Beijing Institute of Technology, 2020, 40(4): 401-408 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJLG202004008.htm [26] 房海蓉, 李壮壮. 新型大转角2T2R并联机构的设计与分析[J]. 北京航空航天大学学报, 2020, 46(3): 465-473 https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK202003002.htmFANG H R, LI Z Z. Design and analysis of a new large rotation angle 2T2R parallel mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(3): 465-473 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK202003002.htm [27] 戴建生. 机构学与机器人学的几何基础与旋量代数[M]. 北京: 高等教育出版社, 2014DAI J S. Geometrical foundations and screw algebra for mechanisms and robotics[M]. Beijing: Higher Education Press, 2014 (in Chinese) -


 点击查看大图
点击查看大图

图(10) / 表(2)
计量
- 文章访问数: 317
- HTML全文浏览量: 186
- PDF下载量: 81
- 被引次数: 0
